2.Система по п. 1 отличающаяся тем, что каждый датчик окончания полива выполнен в виде датчика сопротивления и содержит полосу из токопроводящего материала для укладывания ниже пахотного слоя и изолирующую пленку для экранирования полосы от нижележащего слоя.
3.Система по п. 2, отличающаяся тем, что датчики окончания полива имеют соответственно номеру зоны орощения резисторы с разной величиной сопротивления. 4. Система по п. 1, отличающаяся тем, что узлы управления микрогидрантов выполнены в виде расположенного внутри конусного корпуса регулирующего элемента с сильфонным приводом, внутренняя полость которого гидравлически связана с блоком водораспределения.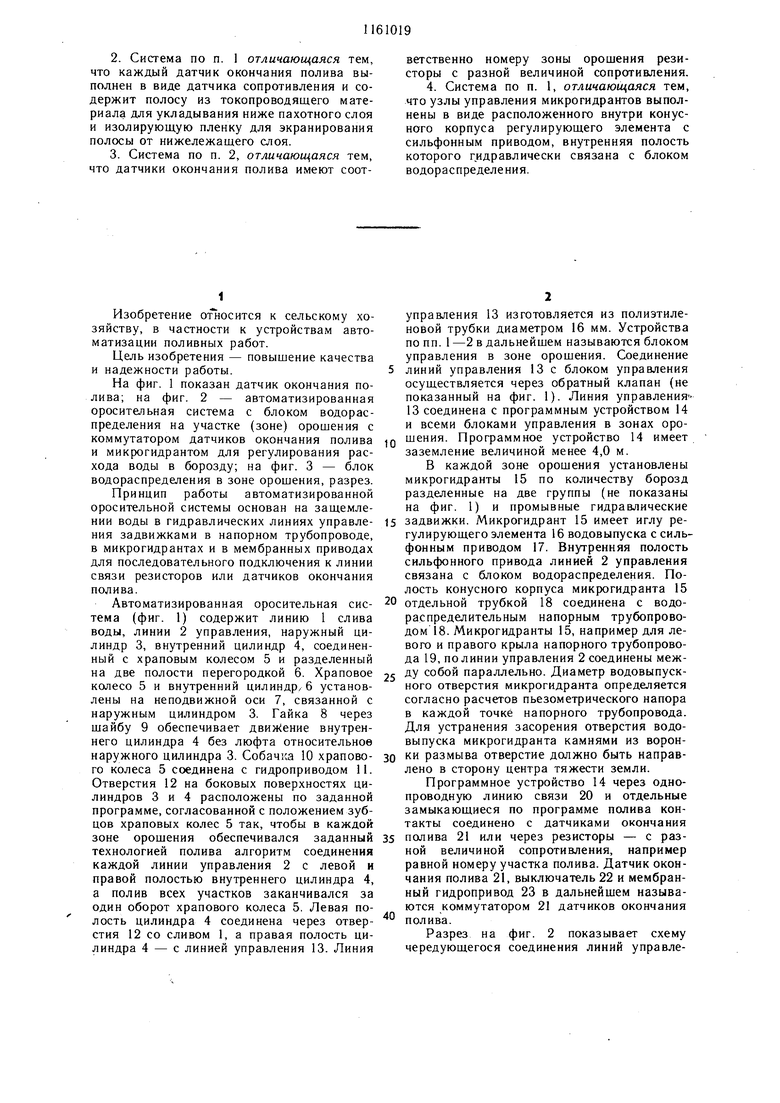
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система импульсного полива по бороздам | 1983 |
|
SU1189399A1 |
| СПОСОБ МЕЛИОРАЦИИ В ПРЕДГОРНОЙ ЗОНЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2387127C1 |
| Автоматизированная система поверхностного полива | 1983 |
|
SU1162385A1 |
| СИСТЕМА МЕЛИОРАЦИИ ПРИ ДИСКРЕТНОМ ПОЛИВЕ ПО БОРОЗДАМ | 2012 |
|
RU2484620C1 |
| Автоматизированная система управления бороздковым поливом | 1986 |
|
SU1329687A1 |
| Способ управления бороздковым импульсным поливом | 1987 |
|
SU1528392A1 |
| АВТОМАТИЗИРОВАННАЯ ЛОТКОВАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА | 1992 |
|
RU2028765C1 |
| Способ управления бороздковым поливом и автоматизированная система для его осуществления | 1989 |
|
SU1674751A1 |
| СПОСОБ ПОЛИВА ПО БОРОЗДАМ | 2005 |
|
RU2314678C2 |
| Автоматизированная система бороздкового полива | 1989 |
|
SU1674752A1 |
1. АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА, включающая подающий напорный трубопровод, программное устройство, связанное гидравлической линией с блоками водораспределения в зонах орошения, перфорированные трубопроводы с водовыпусками в виде микрогидрантов, и датчики окончания полива, подключенные линией связи к программному устройству, отличающаяся тем, что, с целью повышения качества и надежности работы, она снабжена коммутаторами датчиков ограничения полива, выполненных в виде замыкающих контактов и связанных с мембранными гидроприводами в каждой зоне орошения, и узлами управления микрогидрантов, а каждый блок водораспределения выполнен в виде гидравлического шагового искателя с гидроприводом и имеет два соосных закрытых цилиндра, внутренний из которых соединен с приводом гидравлического шагового искателя и разделен перегородкой на две полости, причем боковые поверхности Ш1линдров имеют программно расположенные по разверткам цилиндров отверстия для периодического g сообшения полостей внутреннего цилиндра с узлами управления микрогидрантов. а о со 
Изобретение относится к сельскому хозяйству, в частности к устройствам автоматизации поливных работ.
Цель изобретения - повышение качества и надежности работы.
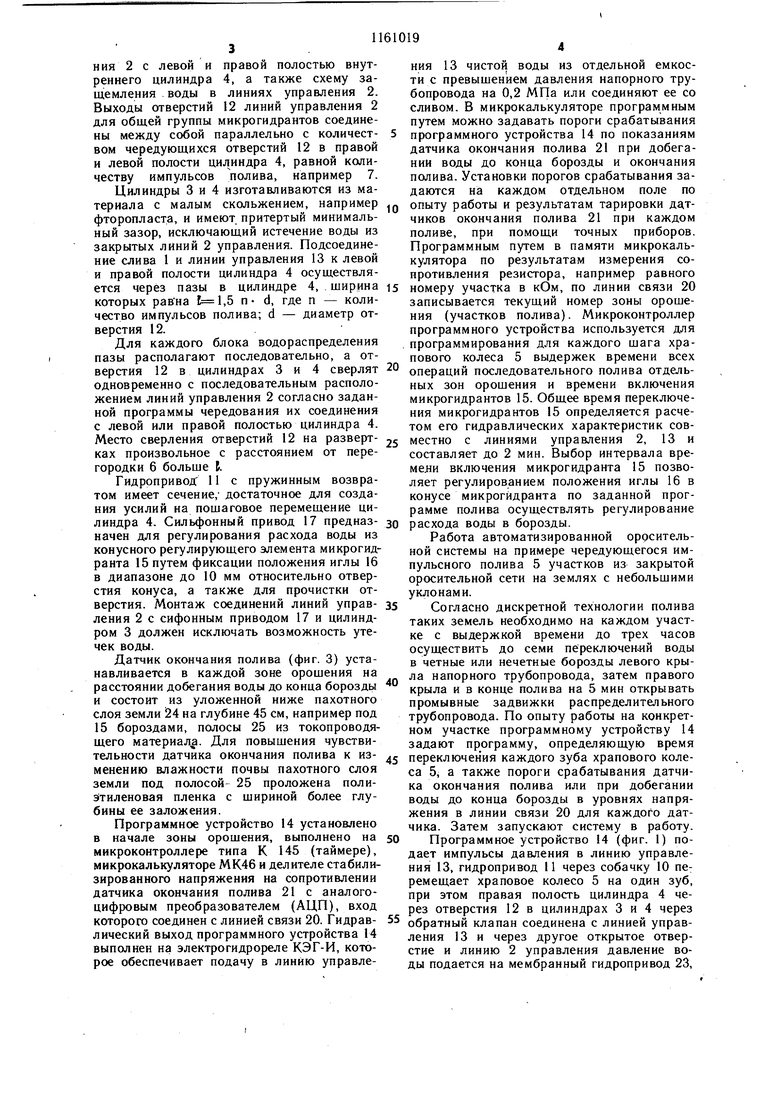
На фиг. 1 показан датчик окончания полива; на фиг. 2 - автоматизированная оросительная система с блоком водораспределения на участке (зоне) орошения с коммутатором датчиков окончания полива и микрогидрантом для регулирования расхода воды в борозду; на фиг. 3 - блок водораспределения в зоне орошения, разрез.
Принцип работы автоматизированной оросительной системы основан на защемлении воды в гидравлических линиях управления задвижками в напорном трубопроводе, в микрогидрантах и в мембранных приводах для последовательного подключения к линии связи резисторов или датчиков окончания полива.
Автоматизированная оросительная система (фиг. 1) содержит линию 1 слива воды, линии 2 управления, наружный цилиндр 3, внутренний цилиндр 4, соединенный с храповым колесом 5 и разделенный на две полости перегородкой 6. Храповое колесо 5 и внутренний цилиндр/6 установлены на неподвижной оси 7, связанной с наружным цилиндром 3. Гайка 8 через шайбу 9 обеспечивает дви Кение внутреннего цилиндра 4 без люфта относительное наружного цилиндра 3. Собачка 10 храпового колеса 5 соединена с гидроприводом 11. Отверстия 12 на боковых поверхностях цилиндров 3 и 4 расположены по заданной программе, согласованной с положением зубцов храповых колес 5 так, чтобы в каждой зоне орошения обеспечивался заданный технологией полива алгоритм соединения каждой линии управления 2 с левой и правой полостью внутреннего цилиндра 4, а полив всех участков заканчивался за один оборот храпового колеса 5. Левая полость цилиндра 4 соединена через отверстия 12 со сливом 1, а правая полость цилиндра 4 - с линией управления 13. Линия
управления 13 изготовляется из полиэтиленовой трубки диаметром 16 мм. Устройства по пп. 1 -2 в дальнейшем называются блоком управления в зоне орошения. Соединение линий управления 13 с блоком управления осуществляется через обратный клапан (не показанный на фиг. 1). Линия управления 13 соединена с программным устройством 14 и всеми блоками управления в зонах ороQ шения. Программное устройство 14 имеет заземление величиной менее 4,0 м.
В каждой зоне орошения установлены микрогидранты 15 по количеству борозд разделенные на две группы (не показаны на фиг. 1) и промывные гидравлические
5 задвижки. Микрогидрант 15 имеет иглу регулирующего элемента 16 водовыпуска с сильфонным приводом 17. Внутренняя полость сильфонного привода линией 2 управления связана с блоком водораспределения. Полость конусного корпуса микрогидранта 15
0 отдельной трубкой 18 соединена с водораспределительным напорным трубопроводом 18. Микрогидранты 15, например для левого и правого крыла напорного трубопровода 19, по линии управления 2 соединены меж5 ДУ собой параллельно. Диаметр водовыпускного отверстия микрогидранта определяется согласно расчетов пьезометрического напора в каждой точке напорного трубопровода. Для устранения засорения отверстия водовыпуска микрогидранта камнями из воронки размыва отверстие должно быть направлено в сторону центра тяжести земли.
Программное устройство 14 через однопроводную линию связи 20 и отдельные замыкающиеся по программе полива контакты соединено с датчиками окончания
полива 21 или через резисторы - с разной величиной сопротивления, например равной номеру участка полива. Датчик окончания полива 21, выключатель 22 и мембранный гидропривод 23 в дальнейшем называются коммутатором 21 датчиков окончания
полива.
Разрез на фиг. 2 показывает схему чередующегося соединения линий управления 2 с левой и правой полостью внутреннего цилиндра 4, а также схему защемления воды в линиях управления 2. Выходы отверстий 12 линий управления 2 для общей группы микрогидрантов соединены между собой параллельно с количеством чередующихся отверстий 12 в правой и левой полости цилиндра 4, равной количеству импульсов полива, например 7. Цилиндры 3 и 4 изготавливаются из материала с малым скольжением, например фторопласта, и имеют притертый минимальный зазор, исключающий истечение воды из закрытых линий 2 управления. Подсоединение слива 1 и линии управления 13 к левой и правой полости цилиндра 4 осуществляется через пазы в цилиндре 4, ширина которых равна ,5 п- d, где п количество импульсов полива; d - диаметр отверстия 12. Для каждого блока водораспределения пазы располагают последовательно, а отверстия 12 в цилиндрах 3 и 4 сверлят одновременно с последовательным расположением линий управления 2 согласно заданной программы чередования их соединения с левой или правой полостью цилиндра 4. Место сверления отверстий 12 на развертках произвольное с расстоянием от перегородки 6 больше I. Гидропривод 11 с пружинным возвратом имеет сечение,- достаточное для создания усилий на пошаговое перемещение цилиндра 4. Сильфонный привод 17 предназначен для регулирования расхода воды из конусного регулирующего элемента микрогидранта 15 путем фиксации положения иглы 16 в диапазоне до 10 мм относительно отверстия конуса, а также для прочистки отверстия. Монтаж соединений линий управлення 2 с сифонным приводом 17 и цилиндром 3 должен исключать возможность утечек воды. Датчик окончания полива (фиг. 3) устанавливается в каждой зоне орошения на расстоянии добегания воды до конца борозды и состоит из уложенной ниже пахотного слоя земли 124 на глубине 45 см, например под 15 бороздами, полосы 25 из токопроводящего материалу. Для повышения чувствительности датчика окончания полива к изменению влажности почвы пахотного слоя земли под полосой- 25 проложена полиэтиленовая пленка с шириной более глубины ее заложения. Программное устройство 14 установлено в начале зоны орошения, выполнено на микроконтроллере типа К 145 (таймере), микрокалькуляторе МК46 и делителе стабилизированного напряжения на сопротивлении датчика окончания полива 21 с аналогоцифровым преобразователем (АЦП), вход которого соединен с линией связи 20. Гидравлический выход программного устройства 14 выполнен на электрогидрореле КЭГ-И, которое обеспечивает подачу в линию управления 13 чистой воды из отдельной емкости с превышением давления напорного трубопровода на 0,2 МПа илн соединяют ее со сливом. В микрокалькуляторе программным путем можно задавать пороги срабатывания программного устройства 14 по показаниям датчика окончания полива 21 при добегании воды до конца борозды и окончания полива. Установки порогов срабатывания задаются на каждом отдельном поле по опыту работы и результатам тарировки датчиков окончания полива 21 при каждом поливе, при помощи точных приборов. Программным путем в памяти микрокалькулятора по результатам измерения сопротивления резистора, например равного номеру участка в кОм, по линии связи 20 записывается текущий номер зоны орошения (участков полива). Микроконтроллер программного устройства используется для программирования для каждого шага храпового колеса 5 выдержек времени всех операций последовательного полива отдельных зон орошения и времени включения микрогидрантов 15. Общее время переключения микрогидрантов 15 определяется расчетом его гидравлических характеристик совместно с линиями управления 2, 13 и составляет до 2 мин. Выбор интервала времели включения микрогидранта 15 позволяет регулированием положения иглы 16 в конусе микрогйдранта по заданной программе полива осуществлять регулирование расхода воды в борозды. Работа автоматизированной оросительной системы на примере чередующегося импульсного полива 5 участков из закрытой оросительной сети на землях с небольшими уклонами. Согласно дискретной технологии полива таких земель необходимо на каждом участке с выдержкой времени до трех часов осуществить до семи переключен ий воды в четные или нечетные борозды левого крыла напорного трубопровода, затем правого крыла и в конце полива на 5 мин открывать промывные задвижки распределительного трубопровода. По опыту работы на конкретном участке программному устройству 14 задают программу, определяющую время переключения каждого зуба храпового колеса 5, а также пороги срабатывания датчика окончания полива или при добегании воды до конца борозды в уровнях напряжения в линии связи 20 для каждого датчика. Затем запускают систему в работу. Программное устройство 14 (фиг. 1) подает импульсы давления в линию управления 13, гидропривод 11 через собачку 10 пе: ремещает храповое колесо 5 на один зуб, при этом правая полость цилиндра 4 через отверстия 12 в цилиндрах 3 и 4 через обратный клапан соединена с линией управения 13 и через другое открытое отверстие и линию 2 управления давление воы подается на мембранный гидропривод 23, который включает контакт 22 и резистор (не показанный на фиг. 1), и в ячейке памяти программного устройства после измерения через АЦП напряжения на сопротивлении резистора записывается номер участка. Внутренняя полость сильфона 17 микрогидрантов 15 первого участка полива через линию управления 2, запараллеленную с программно расположенными отверстиями на цилиндрах 3, 4, и совмещенные отверстия левой части цилиндров 3, 4 соединяется со сливом 1. При этом сильфонный привод 7 под действием давления воды в полости конусного корпуса микрогидранта из напорного трубопровода 19 по трубке 18 открывается на заданный программным устройством расход. На следующем шаге храпового колеса 5 отверстия 12 в цилиндрах 3 и 4, соединенные с микрогидрантами 15, закрываются, вода защемляется в сифонном приводе 17 и фиксирует размер открытого отверстия микрогидрантов 15, а отверстия на выходе в линию управления 2 .мембранного привода 23 открываются. При этом замыкается контакт 22 и АЦП программного устройства 14 подключается к датчику окончания полива 21. Таким образом осуществляется первый и последующие импульсы полива. Контроль уровня напряжения на датчике окончания полива позволяет зафиксировать время добегания воды до конца борозды, откорректировать программу полива, время и расход воды при последующих импульсах полива, а также определить время окончания полива. Импульсный полив первого участка продолжается до достижения заданного уровня напряжения на датчике окончания полива 21. Затем программное устройство 14 устанав / ///// / y/ /// Z //// /// / У////// ///////// у//// ///////// ///////// 25Фиг.2
20 ливает все микрогидранты 15 в закрытое состояние, осуществляет на 5 мин включение промывных задвижек, передвигает храповое колесо 5 в положение, когда левая и правая полости цилиндров 3 и 4 первого участка полива отключена, а второго участка полива подключена к линиям управления 13 и сливу 1. Полив всех участков осуществляется подобным образом. Контроль времени добегания и момента окончания полива, а также регулирование расхода воды в борозду обеспечивают техническую реализацию импульсной технологии полива и высокое качество полива. Отсутствие колебания давления воды в напорном трубопроводе и сокращение количества переключений простого блока водораспределения обеспечивает по сравнению с прототипом повышение надежности работы системы. Эффект от применения системы заключается в технической реализации на землях с малыми уклонами, например в Узбекистане, импульсной технологии полива и достижения следующих показателей: равномерное увлажнение по всей длине борозды, при этом коэффициент равномерности увлажнения достигает 0,9-0,95 вместо 0,65-0,70; исключаются потери на сброс и глубинную фильтрацию, экономия воды за счет их составляет в среднем 30-40% водоподачи; сокращается общая производительность полива в 4-5 раз, что повыщает производительность труда поливальщиков в 3-4 раза, урожайность хлопка сырца на 6 ц/га по сравнению с существующей техникой полива; повыщаются эффективность средства полива за счет улучщения технологических операций и условия работы этих средств в процессе осуществленияполивавгодовыхэффектомдо 100руб/га. /// // / /////7/ 7
ФигЗ
f3
| Патент США № 4233524, кл | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
| Автоматизированная дождевальная система | 1979 |
|
SU888876A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
