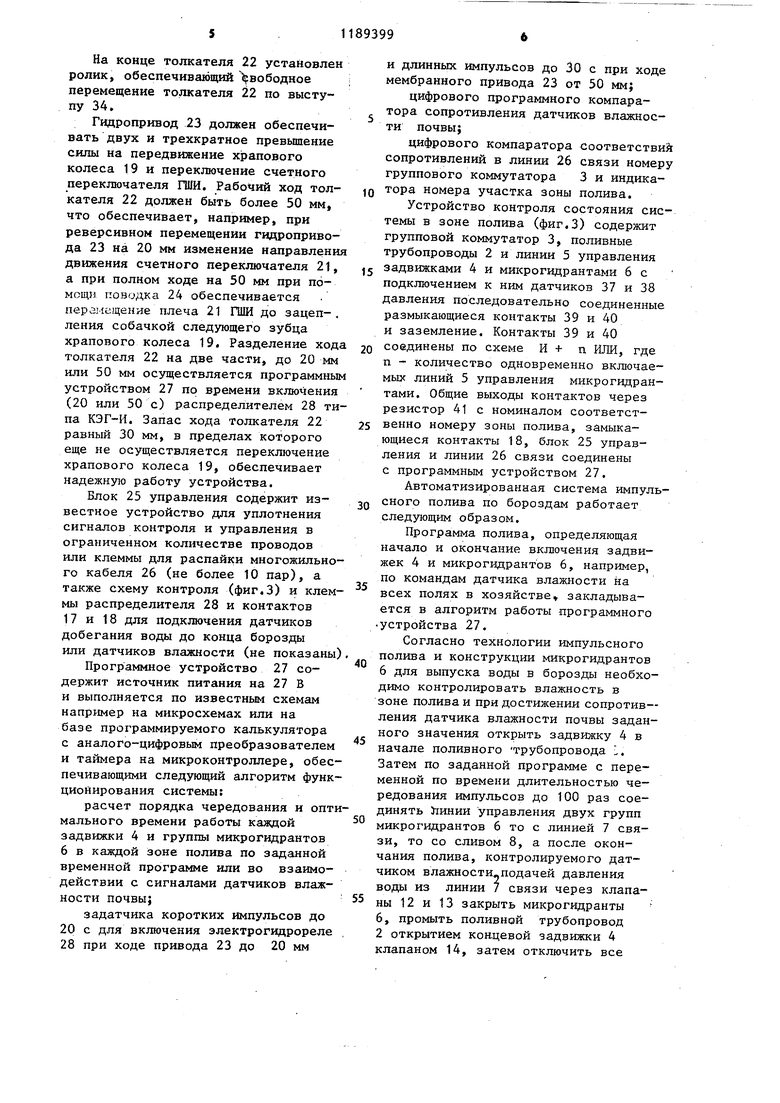
. 1 Изобретение относится к сельско му хозяйству и может быть использовано для управления импульсным режимом полива по бороздам из закрытой оросительной сети на мест ности с уклоном или на тяжелых почвах с необходимым количеством импульсов полива от 7 до 200. Цель изобретения - повьшение надежности работы и гибкости управления системой. На фиг.1 приведены принципиальные схемы системы соединений групп вого коммутатора; на фиг,2 - пример выполнения схемы соединений группового коммутатора с гидравличе.ким шаговым искателем; на фиг. принципиальная схема соединений устройства контроля исправности системы. Автоматизированная система импульсного полива по бороздам (фиг.1) содержит ряд (до 10 на севооборотный массив площадью 150 га) участков ,1 полива из напо ных и поливных трубопроводов 2, групповой коммутатор 3 для управления гидравлическими задвижками 4 на вхЬде и сливе из поливных . трубопроводов 2 через гидравличес кие линии 5 управления микрогидра тами 6 для подачи воды в бороз,ць1 (не показаны). боединёниё линий 5управления с задвижками 4 и микрогидрантами 6 с гидравлической линией 7 связи или со сливом 8 осуществляется че трехходовые г. клапаны 9,-14 управления поливом для автоматического (клапаны 9 и 10) или ручного (кла паны 11-14) задания программы на любое количество импульсов полива групповым коммутатором 3. При это гидравлические линии 5 управления задвижками 4 подключены к гидрав лтшской лцнии 7 связи через трехходовые клапаны 11-14 группового коммутатора 3, а линии управ ния микрогидрантов подсоединены к линии 7 связи через клапаны 12 и 13 и через дополнительные трехходовые клапаны 9 и 10, Программа полива и порядок ком тации датчиков состояния системы и влажности очвы задается конфиг рацией выступов с срезов на кулач ках 15, установленных на общей ос 16 гидравлического шагового искат ля группового коммутатора 3. На оси 16 установлены также два дополнительных кулачка 15 переключения замыкающихся контактов 17 и 18 для коммутации датчиков влажности почвы (контакт 17) или датчиков контроля состояния системы (контакт 18) (фиг.З). Вращение оси 16 и переключение трехходовых клапанов 9-14 достигается движением храпового колеса 19 при передвижении собачки 20 плеча 21 гидравлического шагового искателя (ГШИ) под действием толкателя 22 мембранного гидравлического привода 23. Последний через поводок 24 соединен с плечом 21 ГШИ,на котором установлена собачка 20. Гидропривод 23 имеет конструкцию обеспечивающую короткий, до 20 мм. длинней,более 50 мм,.ход толкатея 22.Контакты 17 и 18 отдельными иниями через блок 25 управления и ровод линии 26 связи соединены с программным устройством 27. К программному устройству 27 через другой провод линии 26 связи подключены электрогидравлические клапанные распределители 28 для управления мембранным приводом 23 каждого участка полива оросительной сети. Левое и правое плечо счетного искателя (ГШИ) соединено с переключателями на трехходовых клапанах 9 и 10, входы которых соединены с гидравлической линией 7 связи и со сливом 8, а выходы через клапаны 12 и 13 и через распределительные гвдравлические линии 5 управления Соединены с микрогидрантами 6. Задвижки 4 через линии 5 управления и трехходовые клапаны 11-14 подключены к гидравлической линии 7 связи и сливу 8. Вход электрогидравлического клапанного распределителя 28 (элекрогидрореле) соединен с гидравлической линией связи и блоком 25 управления, его первый выход через гидравлическую линшо 29 соединен с подмембранной полостью гидропривода 23,. а его второй выход соединен со СЛИВОМ; 8 воды. Сечение гидравлической линии 29 выбирается таким образом, чтобы за время более 50 с толкатель 22 сделал длинный ход и за время до 20 с - короткий ход.
Выступы 30 (фиг.2) ПШ кинематически связаны с трехходовыми клапанами 9 и 10 и обеспечивают чередование включения клапанов при качании счетного переключателя 21 вокру оси 16 под действием толкателя 22 с роликом на конце. Выступ 31 через пружину 32 соединен с неподвижным корпусом 33 группового коммутатора 3 и обеспечивает фиксацию ГШИ в состоянии, соответствующем его положению при предыдущем нажиме толкателя 22. Выступ 34 обеспечивает на каждом коротком шаге толкателя 22 смену левого или правого направлений движения плеча 21 ГШИ. Плоская пружина 35 обеспечивает постоянное зацепление собачки 20 с профилем зубцов храпового колеса 19. Пружина 36 предназначена для возврата толкателя 22 и мебраны гидравлического привода в исходное положение.
Пружина 32 фиксирует плечо 21 ГШИ в состоянии, соответствующем предшествующему / шагу толкателя 22. Положение собачки 20 на произвольном месте зубца храпового колеса 1 9 и одинаковое состояние клапанов 9 и 10 показано в исходномг нерабочем состоянии. Установкой пружины 32 достигают, смещение положения переключателя 21 относително оси толкателя 22, которое изменяется при каждом нажиме толкателя на плечо 21 переключателя. Включени клапанов 9 и 10 возможно также при нажиме толкателя 22 на плечо 21 переключателя ГШИ.Напорные и поливные трубопроводы 2 обеспечивают подачу и распределение воды в борозды на поле площадью 150га. ,Гидравлические линии 5 и 7 управления и свзи обеспечивают превышение давления воды до 0,1 мПа в управляющих органах задвижек 4 микрогидрантов 6 и выполняются из полизтиленовой трубки диаметром до 16 мм.
Подключение линии 7 связи к истонику давления воды осуществляется от отдельного резервуара емкостью до, 3 м с чистой водой, установленной над верхней точкой напорного трубопровода на высоте до 6 м. Задвижки 4 на входе и сливе поливного трубопровода 2 выполнены на мембранных исполнительных механизмах и предназначены для выбора места
полива на отдельных участках тюля из напорного трубопровода 2 и слива воды из поливного трубопровода для его промывки от наносов.
Микрогидранты 6 предназначены для открытия или закрытия отверстий поливного трубопровода при соединении линий 5 управления со сливом 8 или линией 7 связи по командам программного устройства 27 групповым коммутатором 3 через счетный переключатель 21.
Трехходовые клапаны 9-14 изготавливаются литьем из полиэтилена и предназначены для ручного или .дистанционного переключения задвижек 4 и микрогидрантов 6, Подключение верхних клапанов 11-14 левого крыла к задвижкам 4 и микрогидрантам 6 аналогично подключению нижних клапанов правого поливного трубопровода 2. Храповое колесо 19 имеет шесть выступов, обеспечивающих во взаимодействии с положением кулачков 15 следующие операции гидравлического шагового искателя:
первому выступу храпового колеса 19 соответствует отключение всех трехходовых клапанов 9-14 и подача напорной воды из линии 7 связи в линии 5 управления задвижек 4 и микрогидрантов, а также замыкание контакта 17 на коммутаторе предьщущего участка полива для подключения датчиков влажности почвы на нем к программному устройству;
второму выступу храпового колеса 19 соответствует включение клапанов 11-13 для полива правого участка из поливных трубопроводов 2 и включение контакта 18 в схеме контроля состояния системы (фиг.З);
третьему выступу храпового колеса 19 соответствует включение клапанов 11-14 и контактов 18, что обеспечивает промывку водораспределительного трубопровода правого участка поливного трубопровода 2;
четвертый, пятый и шестой выступы храпового колеса 19 работают аналогично на левом участке поливного трубопровода 2, а на шестом выступе обеспечивается отключение всех клапанов 9-14 от слива 8 и контактов 17 и 18, В качестве привода клапанов 9 и 10 может также использоваться спаренное реле 28.
На конце толкателя 22 установлен ролик, обеспечивающий 1 вободное перемещение толкателя 22 по выступу 34.
Гидропривод 23 должен обеспечивать двух и трехкратное превышение силы на передвижение храпового колеса 19 и переключение счетного переключателя ГШИ. Рабочий ход толкателя 22 должен быть более 50 мм, что обеспечивает, например, при реверсивном перемещении гидропривода 23 на 20 мм изменение направления движения счетного переключателя 21, а при полном ходе на 50 мм при помощи поводка 24 обеспечивается пергиещение плеча 21 ГШИ до зацеп-, ления собачкой следующего зубца храпового колеса 19. Разделение ход толкателя 22 на две части, до 20 мм или 50 мм осуществляется программным устройством 27 по времени включения (20 или 50 с) распределителем 28 типа КЭГ-И. Запас хода толкателя 22 равный 30 мм, в пределах которого еще не осуществляется переключение храпового колеса 19, обеспечивает надежную работу устройства.
Блок 25 управления содержит известное устройство для уплотнения сигналов контроля и управления в ограниченном количестве проводов или клеммы для распайки многожильного кабеля 26 (не более 10 пар), а также схему контроля (фиг.З) и клеммы распределителя 28 и контактов 17 и 18 для подключения датчиков добегания воды до конца борозды или датчиков влажности (не показаны
Программное устройство 27 содержит источник питания на 27 В и выполняется по известным схемам например на микросхемах или на базе программируемого калькулятора с аналого-цифровым преобразователем и таймера на микроконтроллере, обеспечивающими следующий алгоритм функционирования системы:
расчет порядка чередования и оптмального времени работы каждой задвижки 4 и группы микрогидрантов 6 в каждой зоне полива по заданной временной программе или во взаимодействии с сигналами датчиков влажности почвы;
задатчика коротких импульсов до 20 с для включения электрогидрореле 28 при ходе привода 23 до 20 мм
и длинных импульсов до 30 с при ходе мембранного привода 23 от 50 мм;
цифрового программного компаратора сопротивления датчиков влажности почвы;
цифрового компаратора соответстви сопротивлений в линии 26 связи номер группового коммутатора 3 и индикатора номера участка зоны полива.
Устройство контроля состояния системы в зоне полива (фиг.З) содержит групповой коммутатор 3, поливные трубопроводы 2 и линии 5 управления задвижками 4 и микрогидрантами 6 с подключением к ним датчиков 37 и 38 давления последовательно соединенные размыкающиеся контакты 39 и 40 и заземление. Контакты 39 и 40 соединены по схеме И + п РШИ, где п - количество одновременно включаемых линий 5 управления микрогидрантами. Общие выходы контактов через резистор 41 с номиналом соответственно номеру зоны полива, замыкающиеся контакты 18, блок 25 управления и линии 26 связи соединены с программным устройством 27.
Автоматизированная система импульсного полива по бороздам работает следующим образом.
Программа полива, определяющая начало и окончание включения задвижек 4 и микрогидрантЬв б, например, по командам датчика влажности на всех полях в хозяйстве закладывается в алгоритм работы программного устройства 27.
Согласно технологии импульсного полива и конструкции микрогидрантов 6 для выпуска воды в борозды необходимо контролировать влажность в зоне поливай при достижении сопротив- ления датчика влажности почвы заданного значения открыть задвижку 4 в начале поливного -трубопровода L. Затем по заданной программе с переменной по времени длительностью чередования импульсов до 100 раз соединять Линии управления двух групп микрогидрантов 6 то с линией 7 связи, то со сливом 8, а после окончания полива, контролируемого датчиком влажНости.подачей давления воды из линии 7 связи через клапаны 12 и 13 закрыть микрогидранты 6, промыть поливной трубопровод 2 открытием концевой задвижки 4 клапаном 14, затем отключить все
клапаны 11-14 от слива 8 и контакты 16 и 18 и включить коммутатор 3 очередного участка полива.
Перед- включением например первого участка 1 зоны полива в работу храповое колесо 19 следующего за ним участка находилось на первом выступе. При этом компаратор сопротивления датчиков влажности программного устройства 27 через контакт 17 п6дкJПoчeн к датчику влажности почвы первого участка 1 поля. После достижения заданной вланости почвы компаратор срабатывает и программное устройство 27 вырабатывает команду для включения rpyliпового коммутатора 3 первого участка на второй шаг храпового колегса 19.
После включения электрогидрореле 28 давление воды из линии 7 связи через линию 29 управления поступает на гидропривод 23. Последний передвигает толкатель 22 на полный ход 50 мм. Толкатель левым выступом 30 переключает;-; клапан 9. При этом зубец, зацепленный за , выступ храпового колеса 19, перемещает его вместе с осью 16 и кулачками 15 на второй выступ, нижние клапаны 11-13 включаются (фиг.1), а также замыкается контакт 18. Соединение полости управления гидрозадвижки 4 со сливомi 8 через клапан 11 обеспечивает ее открытие. Храповое колесо 19 устанавливается на второй выступ. Теперь соединение с давлением воды из линии 7 связи или со сливом 8 микрогидрантов 6 осуществляется не прямо через клапаны 12. или 13, а через коммутируемые счетным переключателем 21 клапаны 10 или 9 с регулируемой программным устройством 27 длительностью импулсов.
Благодаря фиксации изгибающейся пружиной 32 (фиг.2) переключателя 21 на выступае 31 в одном из крайни положений и при соответствующем этому смещению положении выступа 30 толкатель 22 изменяет направление перемещения по профилю выступа 34 при следующем ходе. Во время полива мембранный привод 23 ПЛИ заполнен водой и толкатель 22 через ролик упирается в левую или правую поверхность выступа 34, что обеспечивает
соединение через; клапаны 9 или 10 микрогидрантов 6 со сливом 8. Все это обеспечивает любые требования импульсной технологии полива без усложения конструкции каждого устройства управления задвижками 4 и микрогидрантами 6 и позволяет использовать трехходовые клапаны 11-14 не только для ручного управления, но и в режиме многократного повторения команд импульсного полива. Импульсньй полив продолжается до получения программным устройство 27 сигнала от датчика влажности об окончании полива первого участка зоны полива.
В соответствии с заданной программой полива, аналогично указанному выше, программатор 27 переключае гидравлический шаговый искатель коммутатора 3 на третий выступ храпвого колеса 19. Кулачки 15 отключают клапаны 12 и 13 от управления через клапаны 9 и 10 и клапаны 12 и 13 соединяют линию 7 связи с линией 5 управления микрогидрантами 6. Микрогидранты 6 закрываются. Выход клапана 11 остается соединенным со сливом 8, а выход клапана 14 соединяется со сливом 8, что обеспечивает открытие крнцевой задвижки 4 на промывку правого участка поливного трубопровода 2. После окончания промывки программноеустройство 27 аналогично указанному осуществляет контроль и управление левым крылом водораспределительного трубопровода из оросительной сети 2 Таким образом полив продолжается на всех участках 1 поля.
При заполнении поливного трубопровода из оросительного трубопровода 2 под давлением воды в нем срабатывает сигнализатор 37 давлени (фиг.З) и замыкает контакт 39 в цепи устройства контроля исправности системы. При соединении одной .из линии 5 управления со сливом 8 давление падает и срабатывает один датчиков 38 давления. При этом: з.амьжается цепь между заземлением через замкнутьш контакт 39, один из контактов 40, сопротивление 41, контакт 18, блок 25 управления и линию 26 связи на программное устройство 27. Последнее через компаратор соответствия величины сопротивления номеру группового коммутатоipa сигнализирует о правильной работ системы и разрешает полив.
Если поливной трубопровод -2 имеет разрыв, то контакт 39 не замыкает цепь сопротивления 41 и при любом замнутом контакте 40 компаратор программного устройства 27 не измеряет в линии связи сопротив;1ения. Это несоответствие сигнализирует о неисправности поливного трубопровода 2 и. задвижки 4, Аналогичным (Образом перед поливом очередного участка поля проверяется его готовность к нормальной работе.
Дистанционный контроль состояния
системы и влажности почвы, управления каждым электрогидрореле 28 упрощает конструкцию группового коммутатора 3, повышает надежность его работы и обеспечивает любую
программу полива всех участков поля.
Таким образом, повьшается надежность и гибкость управления системой.
ю.
33
фиг. 2


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная оросительная система | 1982 |
|
SU1161019A1 |
| Автоматизированная система бороздкового полива | 1989 |
|
SU1674752A1 |
| Автоматизированная система бороздкового полива | 1986 |
|
SU1429995A1 |
| Автоматизированная система управления бороздковым поливом | 1982 |
|
SU1099902A1 |
| Способ управления бороздковым импульсным поливом | 1987 |
|
SU1528392A1 |
| Автоматизированная оросительная система | 1988 |
|
SU1662438A1 |
| Способ управления бороздковым поливом и автоматизированная система для его осуществления | 1989 |
|
SU1674751A1 |
| АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2007 |
|
RU2354110C1 |
| Система управления групповой работой широкозахватных дождевальных машин кругового действия | 1989 |
|
SU1665983A1 |
| Система управления многоопорной дождевальной машиной кругового действия | 1989 |
|
SU1665977A1 |


1. АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИМПУЛЬСНОГО ПОЛИВА ПО БОРОЗДАМ, включающая подающий напорный и поливные трубопроводы с гидроуправляемыми микрогидрантами, имеющие на входе и выходе гидроуправляемые задвижки, программное устройство в начале системы и установленные в каждой зоне полива групповой коммутатор с гидравлическим шаговым искателем для управления микрогидрантами и задвижками и блок управления, подключенный электрическими линиями связи к общему программному устройству и к датчикам влажности и состояния системы, отличающаяся тем, что, с целью повьпиения надежности и гибкости управления системой, групповой коммутатор выполнен в виде трехходовых клапанов управления поливом, штоки одних из которых кинематически связаны с кулачками оси гидравлического шагового искателя, гидропровод которого через электро- гидравлический клапанный распределитель,приводимый в действие блоком управления, связан гидравлической линией связи с программным устройством и с трехходовыми клапанами, причем шток гидравлического шагового искателя кинематически связан с двумя другими трехходовыми клапанами, входы КОТОРЫХ подключены к трехходовым клапанам управления поливом, выходы соединены со сливом,а ось гидto равлического шагового искателя снабсл жена двумя дополнительными кулачками, кинематически связанными с контактами датчиков влажности и состояния системы. 2. Система по п.1, о т л и ч аю щ а я с я тем, что каждый датчик состояния системы выполнен 00 в виде последовательно соединенных резистора с номиналом соответственсо оо но номеру зоны полива, замыкающегося контакта с приводом от датчика дав(;О СО ления на входе поливного трубопровода и параллельно включенных замыкающихся контактов от датчиков давлений в группах одновременно включаемых микрогидрантов и от датчика давления на выходе поливного трубопровода.
| Устройство для измерения толщины детали, ограниченной криволинейными поверхностями | 1988 |
|
SU1598597A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизированная оросительная система | 1982 |
|
SU1161019A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
