Изобретение относится к электротехнике и может быть использовано для решения задач управления гистерезисным электродвигателем в автоматизированном электропдиводе инерционных механизмов.
Цель изобретения - повьшение точности контроля.
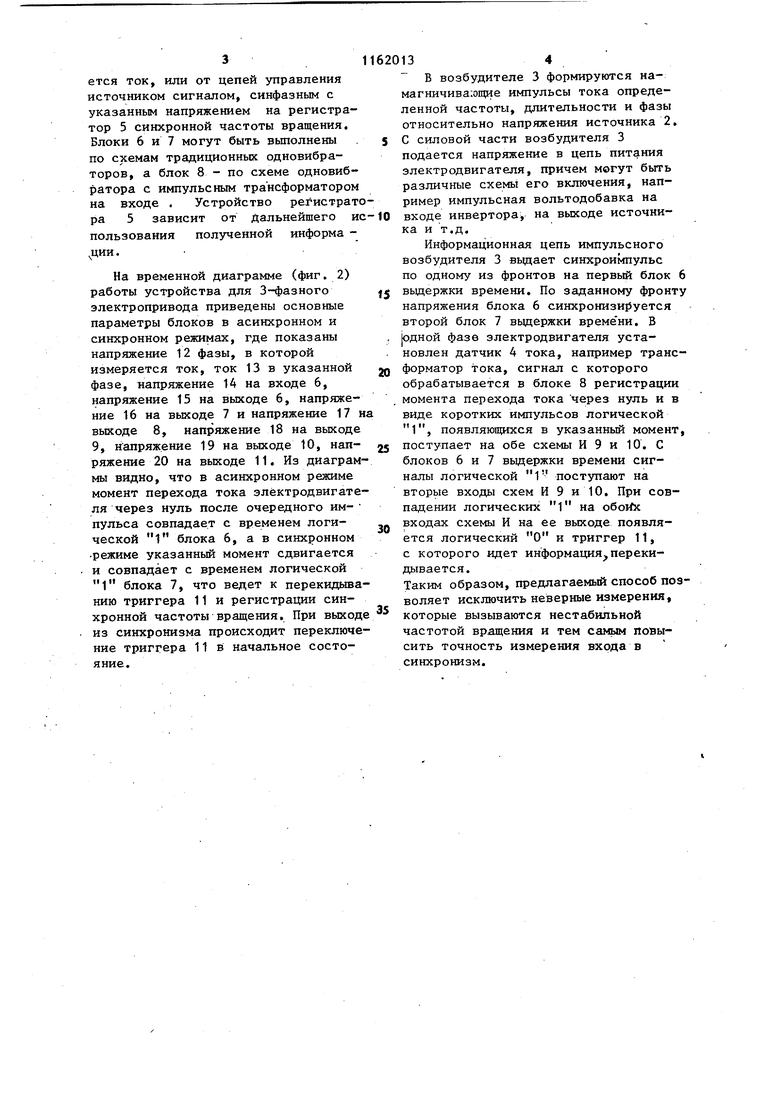
На фиг. 1 приведена структурная схема устройства для контроля входа в синхронизм гистерезисного электродвигателя; на фиг. 2 - временные диаграммы работы.
Устройство для контроля входа в синхронизм гистерезисного электродвигателя 1 содержит т-фазный источник 2 питания, сфазированный импульсный возбудитель 3, датчик 4 тока и регистратор 5 синхронной частоты вращения. Кроме того, он имеет два блока 6 и 7 выдержки времени, блок 8 регистрации момента перехода тока через нуль, две логические , схемы И 9 и 10 и триггер 11, при этом вход первого блока 6 выдержки времени соединен с импульсным возбудителем 3, а выход - с первой схемой И 9 и с входом второго блока 7 вьщержки времени, выход которого соединен с второй схемой И 10, выход блока 8 регистрации момента перехода тока через нуль соединен с вторьми входами схем И 9 и 10, выходы которых соединены с входами триггера 11, а выход последнего связан с регистратором 5 синхронной частоты вращения.
Существо способа 1 онтроля основано на изменении характера переходного процесса изменения импульса тока при входе гистерезисного двигателя в сийхронизм. Вход в синхронизм гистерезисного двигателя сопровождается прекращением скольжения ротора относительно поля статора. Намагниченность ротора и определяемая его величина пр.отиво-ЭДС Е двигателя сцепляются с произвольной геометри.ческой осью ротора. Исчезновение динамической составляющей момента 9 du)/dt при входе двигателя в синхронизм, где 3 - момент инерции; dw/dt - изменение частоты вращения, приводит согласно основному уравнению движения двигателя trdw/dt4-Mj,M) к превышению моментом двигателя Мдв момента сопротивления М, и ротор поворачивается в синхронной системе
координат, связанной с напряжением питания до Mg Лч результате поворачивается фаза,противо-ЭДС Е относительно напряжения питания U. Это наглядно показано на фиг. 2, где осциллограммы характеризуют асинхройный (фиг. 2а) и синхронный (фиг. 26). режимы. Непосредственный контроль за изменением фазы ЭДС Ер затруднено, поэтому это определение производится косвенно по характеру переходного тока намагничивания.
Способ осуществляется следую1ЩМ образом.
Характер переходного процесса при нарастании тока импульса определяется в основном напряжением импульПри выключении импульсного
са и
м,
источника спадание тока зависит от мгновенных соотношений напряжения питания в фазах и мгновенного значения ЭДС ЕО, направленных встречно. Изменение ЭДС Е по фазе в результат поворота ротора после входа его в синхронизм приводит к изменению характера переходного процесса спадани тока. При входе в синхронизм в результате поворота фазы ЭДС Е вместе с ротором относительно напряжения изменяется переходный процесс спаДания тока, а именно, увеличивается фаза перехода через нуль импульса тока, так как мгновенное значение ЭДС ЕО уменьшается по отношению к мгновенному значению напряжения. Этот эффект используется путем измерения фазы перехода через нуль импульса тока, запоминания измеренной фазы, сравнения с фазой перехода через нуль предыдущего импульса тока и при наличии приращения фазы установления факта входа в синхронизм. Таким же образом можно судить об изменении момента нагрузки при работе двигателя в синхронизме, о выходе двигат еля-из си нхро низма.
Способ может быть использован самостоятельно для решения задач контроля входа в синхронизм, а также в составе электропривода для управления двигателем.
Гистерезисный электродвигатель 1 питается от источника 2 т-фазного напряжения.. Одновременно от источника 2 синхронизируется импульсный возбудитель 3 или непосредственно от напряжения фазы, в которой измеряется ток, или от цепей управления источником сигналом, синфазным с указанным напряжением на регистратор 5 синхронной частоты вращения. Блоки 6 и 7 могут быть выполнены по схемам традиционных одновибраторов, а блок 8 - по схеме одновибратора с импульсным трансформатором на входе . Устройство регистрат ра 5 зависит от дальнейшего и пользования полученной информа На временной диаграмме (фиг. 2) работы устройства для 3-фазного электропривода приведены основные параметры блоков в асинхронном и синхронном режимах, где показаны напряжение 12 фазы, в которой измеряется ток, ток 13 в указанной фазе, напряжение 14 на входе 6, напряжение 15 на выходе 6, напряжение 16 на выходе 7 и напряжение 17 вькоде 8, напряжение 18 на выходе 9, напряжение 19 на выходе 10, напряжение 20 на выходе 11. Из диаграм мы видно, что в асинхронном режиме момент перехода тока электродвигате ля через нуль после очередного импульса совпадает с временем логической 1 блока 6, а в синхронном режиме указанный момент сдвигается и совпадает с временем логической 1 блока 7, что ведет к перекидыва нию триггера 11 и регистрации синхронной частоты вращения. При выход из синхронизма происходит переключе ние триггера 11 в начальное состояние. В возбудителе 3 формируются намагничивающие импульсы тока определенной частоты, длительности и фазы относительно напряжения источника 2. С силовой части возбудителя 3 подается напряжение в цепь питания электродвигателя, причем могут быть различные схемь его включения, например импульсная вольтодобавка на входе инвертора, на выходе источника и т.д. Информационная цепь импульсного возбудителя 3 вьвдает синхроимпульс по одному из фронтов на первый блок 6 выдержки времени. По заданному фронту напряжения блока 6 синхронизи15уется второй блок 7 выдержки времени. В |одной фазе электродвигателя установлен датчик 4 тока, например трансформатор тока, сигнал с которого обрабатывается в блоке 8 регистрации момента перехода тока через нуль и в виде коротких импульсов логической 1, появляющихся в указанный момент, поступает на обе схемы И 9 и 10. С блоков 6 и 7 выдержки времени сигналы логической 1 поступают на вторые входы схем И 9 и 10. При совпадении логических 1 на o6orfx входах схемы И на ее выходе появляется логический О и триггер 11, с которого идет информация,перекидывается. Таким образом, предлагаемый способ позволяет исключить неверные измерения, которые вызываются нестабильной частотой вращения и тем самьм повысить точность измерения входа в синхронизм.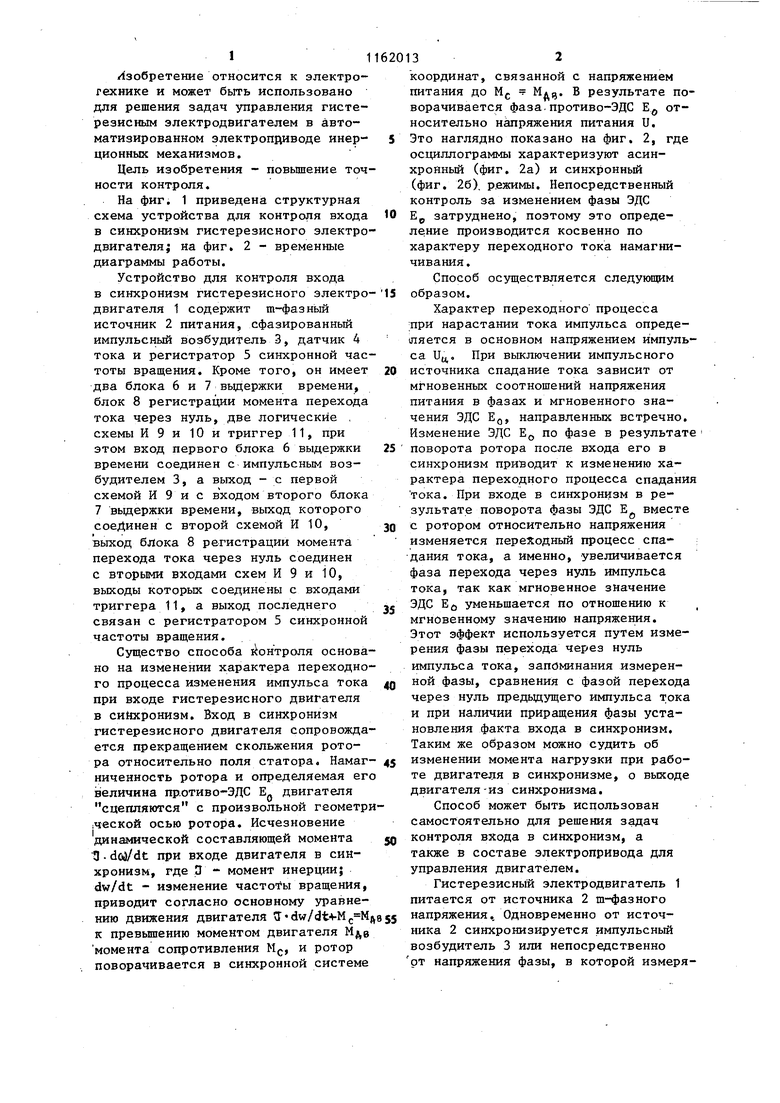
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации группы гистерезисных двигателей | 1984 |
|
SU1241390A1 |
| Электропривод переменного тока | 1985 |
|
SU1361698A1 |
| Устройство для управления гистерезисным электродвигателем | 1981 |
|
SU974540A1 |
| Система электропитания и управления группами гистерезисных электродвигателей | 1984 |
|
SU1241339A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Гистерезисный электропривод | 1984 |
|
SU1270860A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Способ управления гистерезисным электродвигателем | 1981 |
|
SU1008876A1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
| Способ управления в зоне искусственной коммутации вентильным электродвигателем и устройство для его осуществления | 1986 |
|
SU1363390A1 |
СПОСОБ КОНТРОЛЯ ВХОДА В СИНХРОНИЗМ ГИСТЕРЕЗИСНОГО ЭЛЕКТРОДВИГАТЕЛЯ, при котором периодически /. с частотой, меньшей частоты напряжения питания, подают в цепи статора электродвигателя намагничивающие импульсы напряжения заданной фазыи длительности относительно частоты питания, отличающийся тем, что, с целью повышения точности контроля, после действиякаждого намагничиваюп;его импульса напряжения измеряют фазу перехода через нуль импульса тока, запоминают измеренную фазу, сравнивают с фазой перехода через нуль предыдущего импульса тока и при наличии приращения фазы устанавливают факт входа в синхронизм гистерезисного электродвигателя. (Л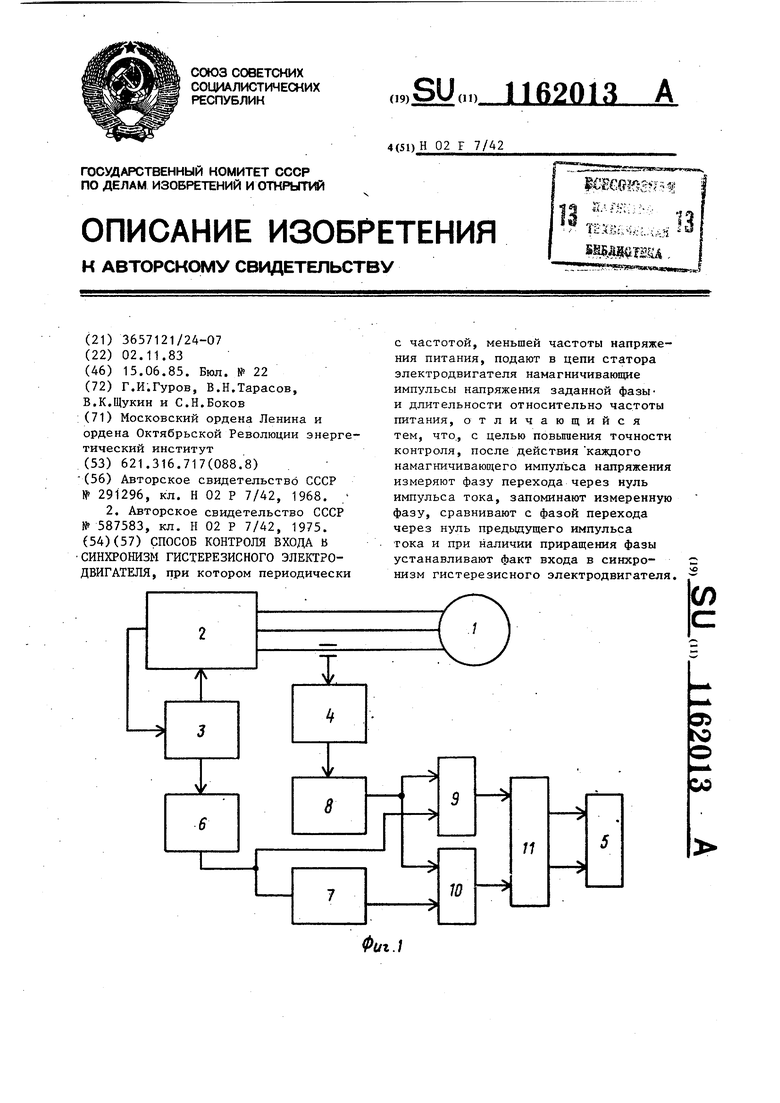
| 0 |
|
SU291296A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ частотного запуска (торможения) гистерезисного двигателя | 1975 |
|
SU587583A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
