Изобретение относится к электроехнике., а именно к системам электопитания и управления гистерезисны- и двигателями многодвигательного электропривода технологических лиий,
Цель изобретения - повышение экоомичности за счет увеличения КПД и адежности,, обеспечение устойчивости, адежного ввода в синхронизм всех групп электродвигателей, защиты источника питания.
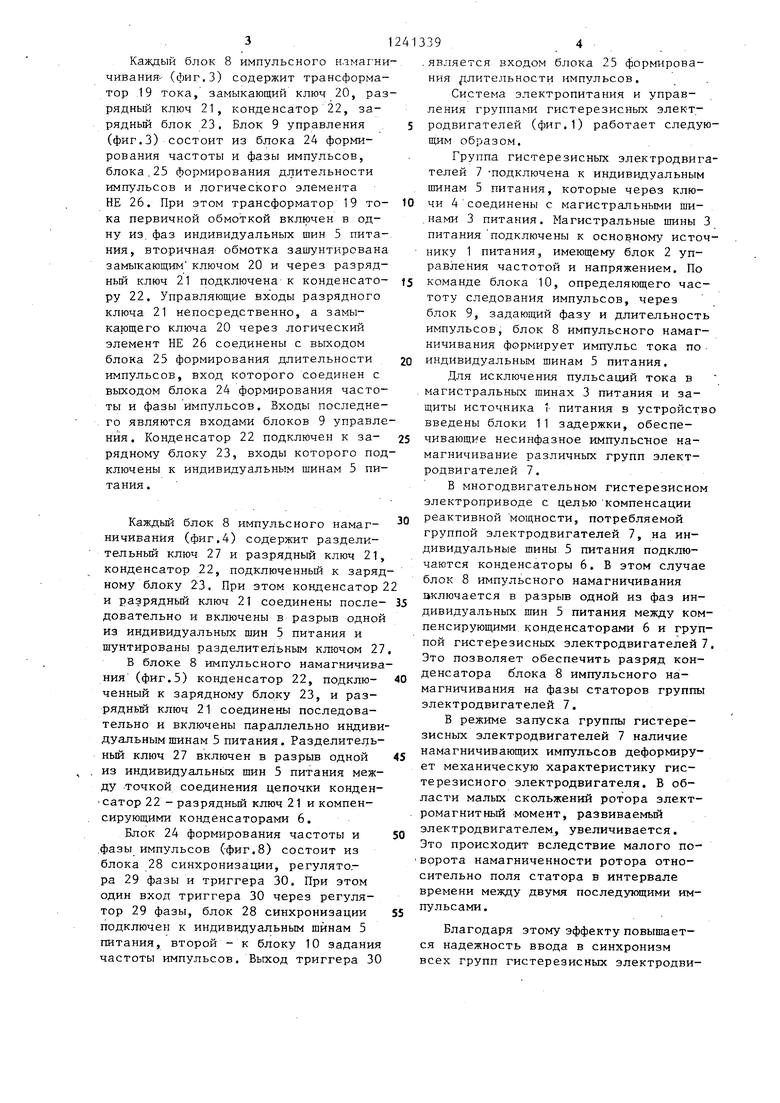
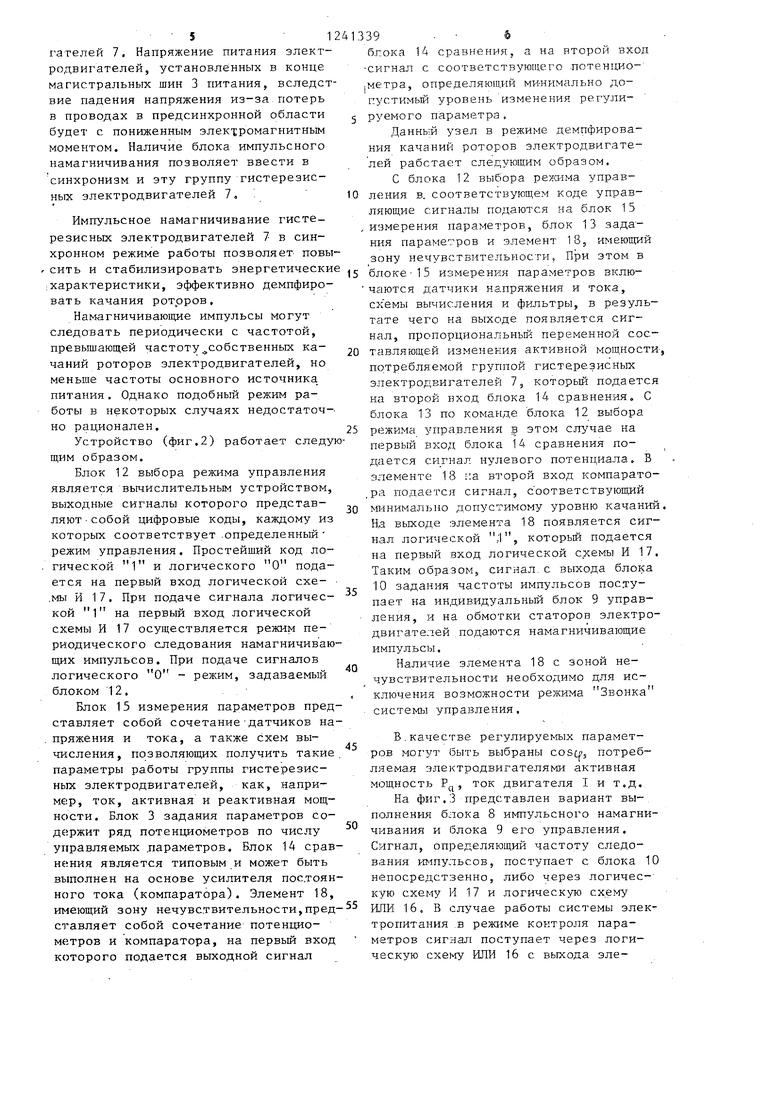
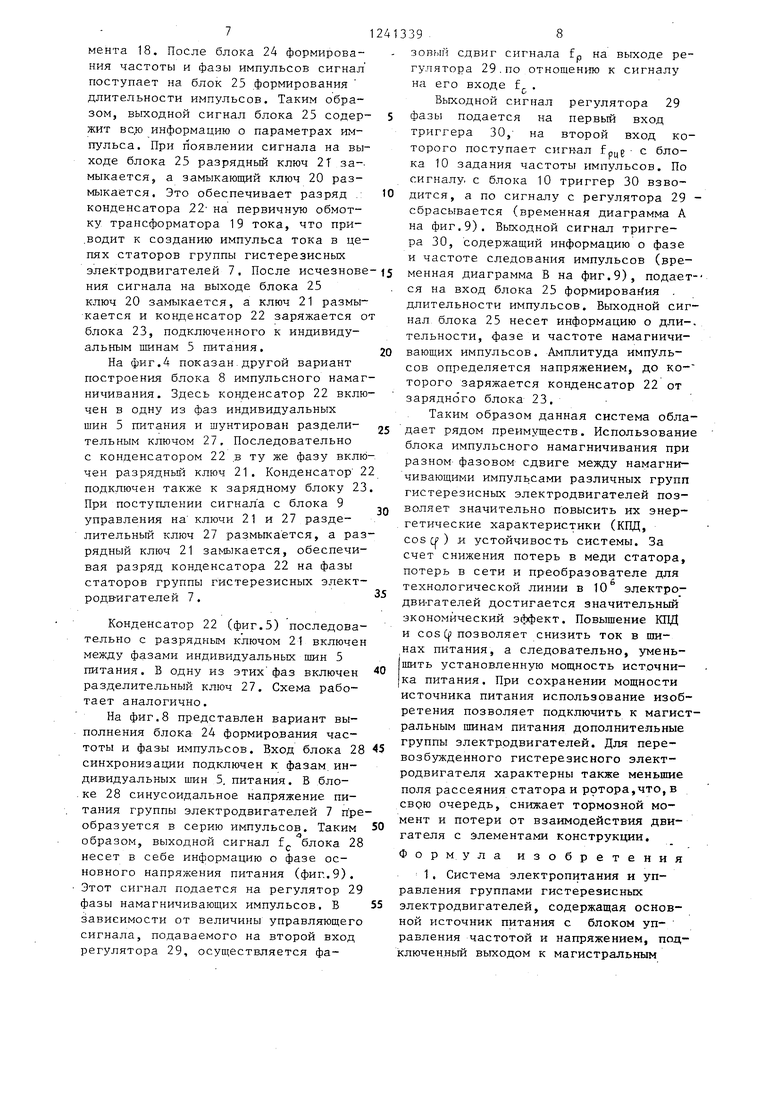
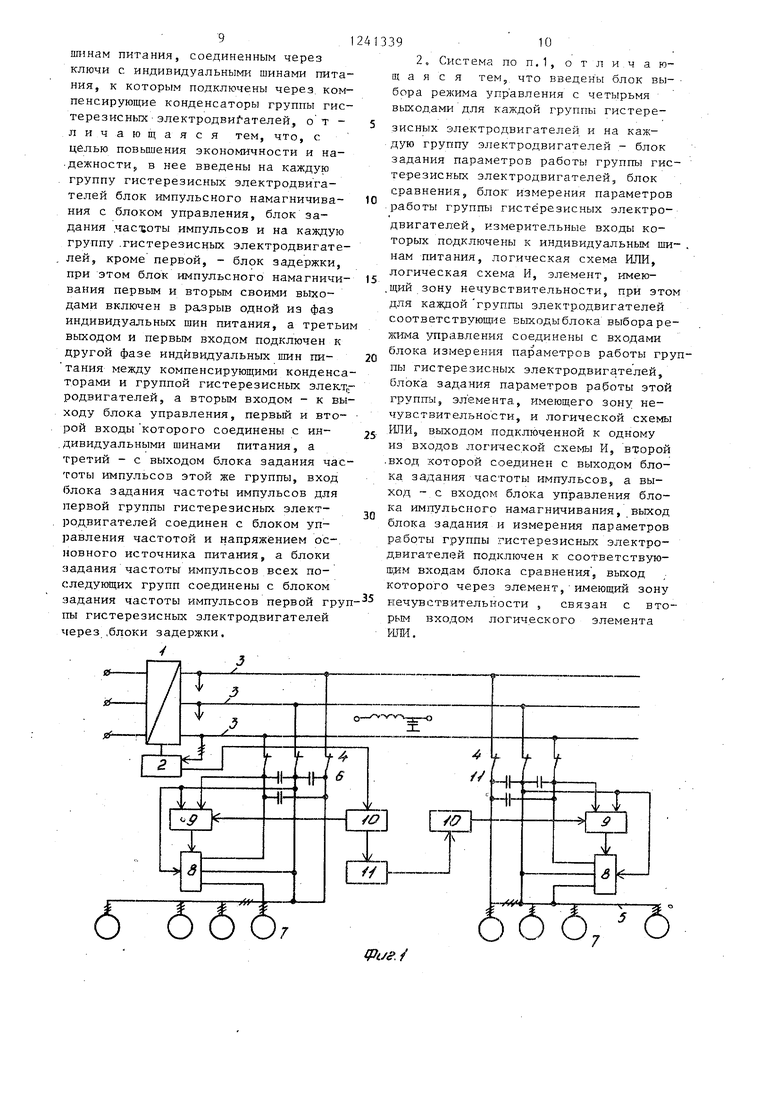
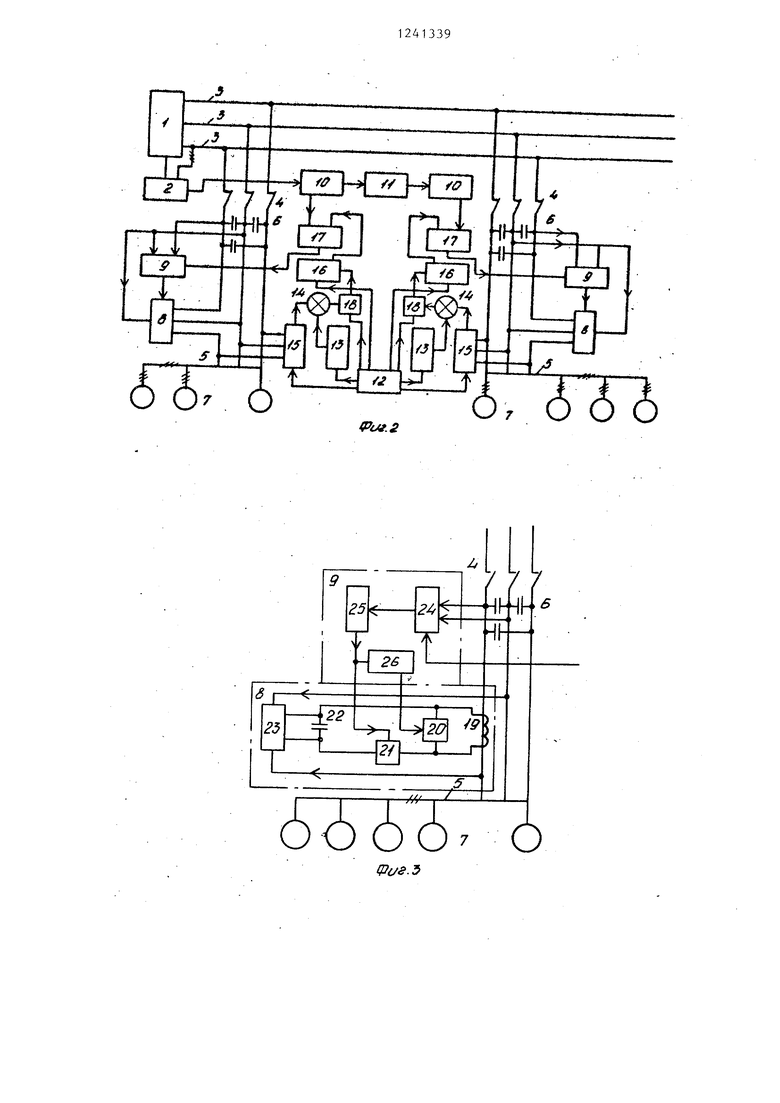
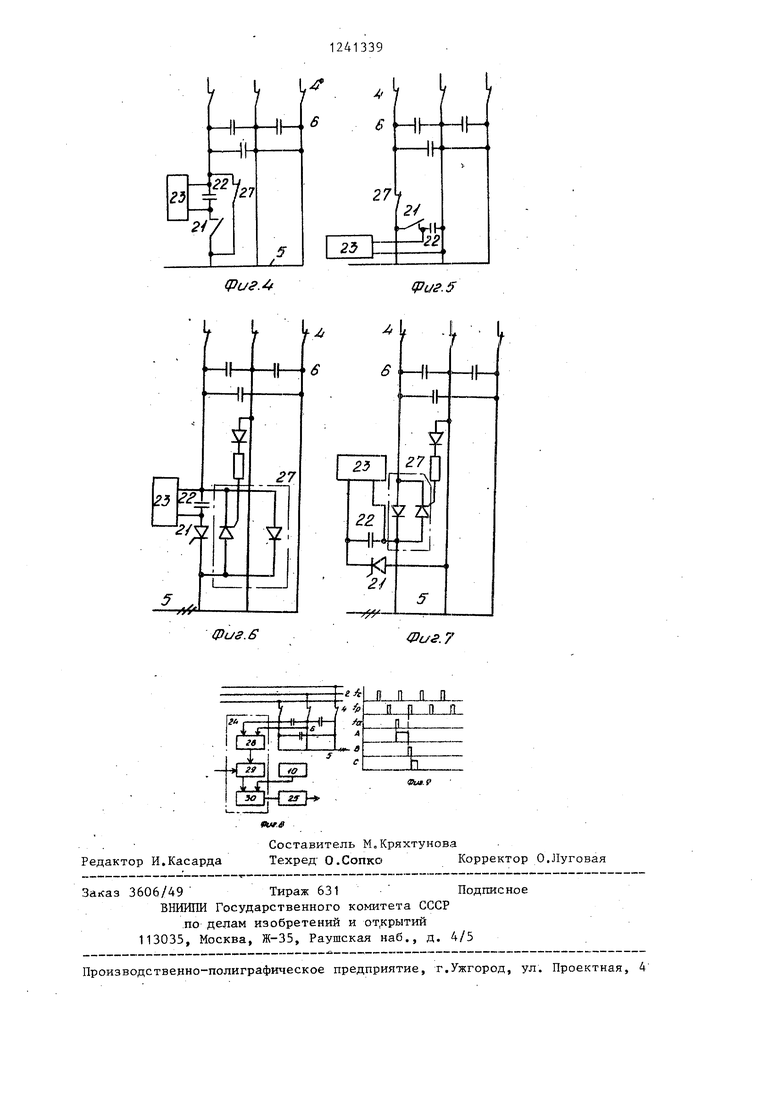
На фиг.1 изображена структурная схема системы электропитания и управления (п,1); на фиг.2 - структурная схема системы электропитания и управления (п.2); на фиг.З - структурная схема варианта выполнения блока импульсного намагничивания и блока его управления; на фиг.4 и 5 - варианты структурного выполнения блока импульсного намагничивания; на фиг.6 и 7 - принципиальные схемы . выполнения блока импульсного намагничивания по фиг.4 и фиг,5 соответственно; на фиг.8 - структурная схема выполнения блока формирования частоты и фазы импульсов; на фиг.,9 - временные диаграммы, поясняющие принцип задания параметров импульсов.
Система электропитания и управления группами гистерезисных элект- родвига-телей (фиг.1) содержит основной источник 1 питания с блоком 2 управления частотой и напряжением. К выходам основного источника 1 питания подключены магистральные шины 3 питания, соединенные через ключи 4 с индивидуальными шинами 5 питания, к которым подключены через компенсирующие конденсаторы 6 группы гистерезисных электродвигателей 7.Система содержит также на каждую группу гистерезисных электродвигателей 7 блок 8 импульсного намагничивания с блоком 9 управления, блок 10 задания частоты импульсов и на каждую Группу гистерезисных электродвигателей 7, кроме первой, - блок 11 задержки. При этом блок 8 импульсно-j го намагничивания первым и вторым своими выходами включен в разрыв одной из фаз индивидуальных шин 5 питания, а третьим выходом и первым входом подключен к другой фазе индивидуальных шин 5 питания, между компенсирующими конденсаторами 6 и .группой гистерезисных электродвига
5
0
5
0
5
0
5
0
5
телей 7, а вторым входом - к выходу блока 9 управления, первый-и второй входы которого соединены с индивидуальными шинами 5 питания, а третий - с выходом блока 10 задания частоты иг шульсов этой же группы, вход блока 10 задания частоты импульсов РД1Я первой групшз гистерезисных элек1родвигателей 7 соединен с блоком 2 управления частотой и напряжением основного источника 1 питания, а блоки 10 задания частоты импульсов всех последующих групп 7 соединены с блоком 10 задания частоты импульсов первой груп - пы гистерезисных, электродвига - телей 7 через блоки 11 задержки.
Система электро1титания и управле- .ния группами гистерезисных электродвигателей (фиг.2) содержит также блок 12 выбора режима управления с четырьмя выходами для каждой группы гистерезисных электродвигателей 7 и на группу электродвигателей 7 - блок 13 задания параметров работы группы гистерезисных электродвигателей 7j блок 14 сравнения5 блок 15 измерения параметров работы группы гистерезисных электродвигате- ,, измерительные входы которых подключены к индивидуальным, шинам 5 питания, логическую cxeNry ИЛИ 16, логическую схему И 17, элемент 18, имеющий зону нечувствительности.При этом для кажд,ой группы электродвигателей 7 соответствующие выходы блока 12 выбора режима управле {ия сое-- динены с входами блока 15 измерения параметров работы группы гистерезисных электродвигателей 7, блока 13 задания параметров работы этой группы электродвигателей 7, элемента 18, имеющего зону нечувствительности, и логической схемь ИЛИ 16, выходом подключенной к одному из входов логической схемы И 1 7,второй вход которой соединен с выходом блока 10 задания частоты: импульсов, а выход - с входом блока 9 управления блока 8 импульсного намагничивания. Выход блока 15 измерения параметров работы гругхпы гистерезисных электродвигателей 7 подключен к соответствующим входам блока 14 сравнения, выход которого через элемент 18 связан с вторым входом логического элемента ИЛИ 16.
31
Каждый блок 8 импульсного намагничивания (фиг.З) содержит трансформатор 19 тока, замыкающий ключ 20, разрядный ключ 21, конденсатор 22, зарядный блок 23. Блок 9 управления . (фиг.З) состоит из блока 24 формирования частоты и фазы импульсов, блока.25 формирования длительности импульсов и логического элемента НЕ 26. При этом трансформатор 19 то- ка первичной обмоткой включен в одну из. фаз индивидуальных шин 5 питания, вторичная обмотка зашунтирована замыкающим ключом 20 и через разряд- ньй ключ 21 подключена к конденсато- ру 22. Управляющие входы разрядного ключа 21 непосредственно, а замыкающего ключа 20 через логический элемент НЕ 26 соединены с выходом блока 25 формирования длительности импульсов, вход которого соединен с выходом блока 24 формирования частоты и фазы импульсов. Входы последнего являются входами блоков 9 управления. Конденсатор 22 подключен к за- рядному блоку 23, входы которого подключены к индивидуальным шинам 5 питания .
Каждьш блок 8 импульсного намаг- ничиванйя (фиг.4) содержит разделительный ключ 27 и разрядный ключ 21, конденсатор 22, подключенный к зарядному блоку 23. При этом конденсатор 2 и разрядньш ключ 21 соединены после- довательно и включены в разрыв одной из индивидуальных шин 5 питания и шунтированы разделительным ключом 27
В блоке 8 импульсного намагничивания (фиг,5) конденсатор 22, подклю- ченный к зарядному блоку 23, и разрядный ключ 21 соединены последовательно и включены параллельно индивидуальным шинам 5 питания. Разделитель- ньй ключ 27 включен в разрыв одной из индивидуальных шин 5 питания между -точкой соединения цепочки конден- сатор 22 - разрядный ключ 21 и компенсирующими конденсаторами 6.
Блок 24 формирования частоты и .фазы импульсов (-фиг.8) состоит из блока 28 синхронизации, регулято,- ра 29 фазы и триггера 30. При этом один вход триггера 30 через регулятор 29 фазы, блок 28 синхронизации подключен к индивидуальным шинам 5 питания, второй - к блоку 10 задания частоты импульсов. Выход триггера 30
394
является входом блока 25 формирования /длительности импульсов.
Система электропитания и управления группами гистерезисных элек-т- родвигателей (фиг.1) работает следующим образом.
Группа гистерезисных электродвигателей 7 -подключена к индивидуальным шинам 5 питания, которые через ключи 4 соединены с магистральными ши- нами 3 питания. Магистральные шины 3 питания подключены к основному источнику 1 питания, имеющему блок 2 управления частотой и напряжением. По команде блока 10, определяющего частоту следования импульсов, через блок 9, задающий фазу и длительность импульсов, блок 8 импульсного намагничивания формирует импульс тока по индивидуальным шинам 5 питания. Для исключения пульсаций тока в
магистральных шинах 3 питания и защиты источника питания в устройство введены блоки 11 задержки, обеспечивающие несинфазное импульстюе намагничивание различных групп электродвигателей 7.
В многодвигательном гистерезисном электроприводе с целью компенсации реактивной мощности, потребляемой группой электродвигателей 7, на индивидуальные шины 5 питания подключаются конденсаторы 6. В этом случае блок 8 импульсного намагничивания оключается в разрыв одной из фаз ин- .дивидуальных шин 5 питания между компенсирующими конденсаторами 6 и группой гистерезисных электродвигателей 7. Это позволяет обеспечить разряд коненсатора блока 8 импульсного намагничивания на фазы статоров группы электродвигателей 7.
В режиме запуска группы гистерезисных электродвигателей 7 наличие намагничивающих импульсов деформиру ет механическую характеристику гис- терезисного электродвигателя. В обасти малых скольжений ротора электромагнитный момент, развиваемый электродвигателем, увеличивается. Это происходит вследствие малого поворота намагниченности ротора отноительно поля статора в интервале ремени между двумя последующими импульсами.
Благодаря этому эффекту повышается надежность ввода в синхронизм всех групп гистерезисных электродвигателей 7. Напряжение питания электродвигателей, установлёнпых в конце магистральных шин 3 питания, вследствие падения напряжения из-за потерь в проводах в предсинхронной области будет с пониженным электромагнитным моментом. Наличие блока импульсного намагничивания позволяет ввести в синхронизм и эту группу гистерезис- ных электродвигателей 7,
Импульсное намагничивание гистерезис ных электродвигателей 7 в синхронном режиме работы позволяет повы.сить и стабилизировать энергетические блоке15 измерения параметров вклю- характеристики, эффективно демпфироС блока 12 выбора реяшма управ- 10 ления в, соответствующем коде управ ляющие сигналы подаются на блок 15 , измерения параметров, блок 13 зада ния параметров и элемент 18, имеющ зону нечувствительности,, При этом
чаются датчики напряжения и тока, сх емы вычисления и фильтры, в резул тате чего на выходе появляется сигнал, пропорциональный переменной со 20 тавляющей изменения активной мощно потребляемой группой гистерезисных э.;1ектродвигателей 7, которьш подает на второй вход блока 14 сравнения. блока 13 по команде блока 12 выбора режима управления этом случае на первый вход блока 14 сравнения подается сигнал нулевого потенциала, элементе 18 па второй вход компарат ра подается сигнал, Соответствующий минимально допустимому уровню кача БД выходе элемента 18 появляется с
25
30
вать качания роторов.
Намагничивающие импульсы могут следовать периодически с частотой, превышающей частоту собственных качаний роторов электродвигателей, но меньше частоты основного источника питания, Однако подобный режим работы в некоторых случаях недостаточ- но радионален.
Устройство (фиг,2) работает следующим образом.
Блок 12 выбора режима управления является вычислительным устройством, выходные сигналы которого представляют собой цифровые коды, каждому из которык соответствует .определенный режим управления. Простейший код ло- гической 1 и логического О подается на первый вход логической схе- .мы И 17. При подаче сигнала логичес- - кой 1 на первый вход логической схемы И 17 осуществляется режим периодического следования намагничивающих импульсов. При подаче сигналов логического О - режим, задаваемый блоком 12,.
Блок 15 измерения параметров представляет собой сочетание-датчиков на- пряжения и тока, а также схем вычисления, позволяющих получить такие, параметры работы группы гистерезис- ных электродвигателей, как, например, ток, активная и реактивная мощности. Блок 3 задания параметров содержит ряд потенциометров по числу управляемых .параметров. Блок 14 сравнения является типовым и может быть выполнен на основе усилителя постоянного тока (компаратора). Элемент 18, имеющий зону нечувс.твительности,пред ставляет собой сочетание потенциометров и компаратора, на первьй вход которого подается выходной сигнал
20
4Q
45
50
.-55
блоке15 измерения параметров вклю-
блока 14 сравнения, а на второй вход сигнал с соответствующего лотенцио- Метра, определяюш.ий минимально до- пустимьш уровень изменения регули- руемого параметра,
Данный узел в режиме демпфирования качаний роторов электродвигателей работает следующим образом.
С блока 12 выбора реяшма управ- ления в, соответствующем коде управляющие сигналы подаются на блок 15 измерения параметров, блок 13 задания параметров и элемент 18, имеющий зону нечувствительности,, При этом в
блоке15 измерения параметров вклю-
чаются датчики напряжения и тока, сх емы вычисления и фильтры, в результате чего на выходе появляется сигнал, пропорциональный переменной сос- тавляющей изменения активной мощности, потребляемой группой гистерезисных э.;1ектродвигателей 7, которьш подается на второй вход блока 14 сравнения. С блока 13 по команде блока 12 выбора режима управления этом случае на первый вход блока 14 сравнения подается сигнал нулевого потенциала, В элементе 18 па второй вход компаратора подается сигнал, Соответствующий минимально допустимому уровню качаний, БД выходе элемента 18 появляется сигнал: логической
который подается
-
Q
5
0
на первый вход логической схемы И 17, Таким образом сигнал.с выхода блока 10 задания частоты импульсов поступает на индивидуальный блок 9 управления, и на обмотки статоров электродвигателей подаются намагничивающие импульсы.
Наличие элемента 18 с зоной нечувствительности необходимо для исключения возможности режима Звонка системы управления,
В.качестве регулируемых параметров могут быть выбраны cosq, потребляемая электродвигателями активная мощность 5 ток двигателя I и т.д.
На фиг,3 представлен вариант выполнения блока В импульсного намагничивания и блока 9 его управления. Сигнал, определяющий частоту следования импульсов, поступает с блока 10 непосредственно, либо через логическую схему И 17 и логическую схему ИЛИ 16. В случае работы системы электропитания .в режиме контроля параметров сигнал поступает через логическую ИЛИ 16 с выхода эле71
мента 18. После блока 24 формирования частоты и фазы импульсов сигнал поступает на блок 25 формирования длительности импульсов. Таким образом, выходной сигнал блока 25 содер- жит всдо информацию о параметрах импульса. При появлении сигнала на выходе блока 25 разрядный ключ 2Т за-, мыкается, а замыкающий ключ 20 размыкается. Это обеспечивает разряд : конденсатора 22 на первичную обмотку трансформатора 19 тока, что при- .водит к созданию импульса тока в цепях статоров группы гистерезисных электродвигателей 7. После исчезновения сигнала на выходе блока 25 ключ 20 замыкается, а ключ 21 размыкается и конденсатор 22 заряжается от блока 23, подключенного к индивидуальным шинам 5 питания.
На фиг.4 показан.другой вариант построения блока 8 импульсного намагничивания. Здесь конденсатор 22 вклю- чен в одну из фаз индивидуальных шин 5 питания и шунтирован раздели- тельным ключом 27. Последовательно с конденсатором 22 в ту же фазу включен разрядньш ключ 21. Конденсатор 22 подключен также к зарядному блоку 23 При поступлении сигнала с блока 9 управления на ключи 21 и 27 разделительный ключ 27 размыка ется, а разрядный ключ 21 замыкается, обеспечивая разряд конденсатора 22 на фазы статоров группы гистерезисных элект- родв-игателей 7.
Конденсатор 22 (фиг.5) последовательно с разрядным ключом 21 включен между фазами индивидуальных шин 5 питания. В одну из этих фаз включен 0 разделительный ключ 27. Схема работает аналогично.
На фиг.8 представлен вариант выполнения блока 24 формирования частоты и фазы импульсов. Вход блока 28 45 синхронизации подключен к фазам, индивидуальных шин 5, питания. В бло- .ке 28 синусоидальное напряжение питания группы электродвигателей 7 п ре- образуется в серию импульсов. Таким 50
образом, выходной сигнал f блока 28 несет в себе информацию о фазе основного напряжения питания (фиг.9). Этот сигнал подается на регулятор 29 фазы намагничивающих импульсов. В 55 зависимости от величины управляющего сигнала, подаваемого на второй вход регулятора 29, осуществляется фа
5 5 0
s
5
0
5 0
5
3398
зов)1й сдвиг сигнала fp на выходе регулятора 29.по отношению к сигналу на его входе f,.
G
Выходной сигнал регулятора 29 фазы подается на первый вход триггера 30, на второй вход которого поступает сигнал font с блока 10 задания частоты импульсов. По сигналу, с блока 10 триггер 30 взводится, а по сигналу с регулятора 29 - сбрасывается (временная диаграмма А на фиг.9). Выходной сигнал триггера 30, содержащий информацию о фазе и частоте следования импульсов (временная диаграмма В на фиг.9), подает-- ся на вход блока 25 формирования . длительности импульсов. Выходной сигнал блока 25 несет информацию о дли-, тельности, фазе и частоте намагничивающих импульсов. Амплитуда импульсов определяется напряжением, до ко- торого заряжается конденсатор 22 от зарядного блока 23.
Таким образом данная система обладает рядом преимуществ. Использование блока импульсного намагничивания при разном фазовом сдвиге между намагничивающими импульсами различных групп гистерезисных электродвигателей позволяет значительно повысить их энер- . гетические характеристики (КПД, cos q ) и устойчивость системы. За счет снижения потерь в меди статора, потерь в сети и преобразователе для технологической линии в 10 электро- дви-гателей достигается значительный экономический эффект. Повышение КПД и cosQ) позволяет снизить ток в шинах питания, а следовательно, уменьшить установленную мощность источника питания. При сохранении мощности источника питания использование изобретения позволяет подключить к магистральным шинам питания дополнительные группы электродвигателей. Для перевозбужденного гистерезисного электродвигателя характерны также меньшие поля рассеяния статора и ротора,что, в свою очередь, снижает тормозной момент и потери от взаимодействия двигателя с Элементами конструкции,
Формула изобретения
1, Система электропитания и управления группами гистерезисных электродвигателей, содержащая основной источник питания с блоком уп- равления частотой и напряжением, подключенный выходом к магистральным
91
шинам питания, соединенным через ключи с индивидуальными шинами питания, к которым подключены через, компенсирующие конденсаторы группы гис- терезисныхэлектродвигателей, отличающаяся тем, что, с целью повьшения экономичности и на дежности;, в нее введены на каждую группу гистерезисных электродвигателей блок импульсного намагничивания с блоком управления, блок задания частготы импульсов и на каждую группу .гистерезисных электродвигателей, кроме первой, - блок задержки, при этом блок импульсного намагничивания первым и вторым своими выходами включен в разрыв одной из фаз индивидуальных шин питания, а третьим выходом и первым входом подключен к другой фазе индивидуальных шин пи тания между компенсирующими конденсаторами и группой гистерезисных электгг родвигателей, а вторым входом - к выходу блока управления, первый и вто- рой входы которого соединены с ин,дивидуальными шинами питания, а третий - с выходом блока задания частоты импульсов этой же группы, вход блока задания частоты импульсов для первой группы гистерезисных электродвигателей соединен с блоком управления частотой и напряжением основного источника питания, а блоки задания часто.ты импульсов всех последующих групп соединены с блоком задания частоты импульсов первой груп пы гистерезисных электродвигателей через .блоки задержки,
/
1339
10
П.1,
отличаю10
15
20
25
30
35
2 о Система по щ а я с я тем, что введены блок вы- бора режима управления с четырьмя выходами для каждой группь гистерезисных электродвигателей и на каждую группу электродвигателей - блок задания параметров работы группы гис- те-резискых электродвигателей, блок сравнения, блок измерения параметров работы группы гисте резисных электродвигателей, измерительные входы которых подключены к индивидуальным ши- . нам питания, логическая схема ИЛИ, логическая схема И, элемент, имею- ,щий зону нечувствительности, при этом для кажд,ой группы электродвигателей соответствующие выходыблока выбораре- лшма травления соединены с входами блока измерения параметров работы группы гистерезисных электродвигателей, блока задания параметров работы этой группы, элемента, имеющего зону нечувствительности, и логической схемы ШШ, выходом подключенной к одному из входов логической схемы И, второй .вход которой соединен с выходом блока задания частоты импульсов, а выход - с входом блока управления блока им)1ульсного намагничивания, выход блока задания и измерения параметров работы группы гистерезисных электродвигателей подключен к соответствую- ffijiM входам блока сравнения , выход которого через элемент, имеющий зону нечувствительности , связан с вторым входом логического элемента
wm.
IPuff. /
О
О ООО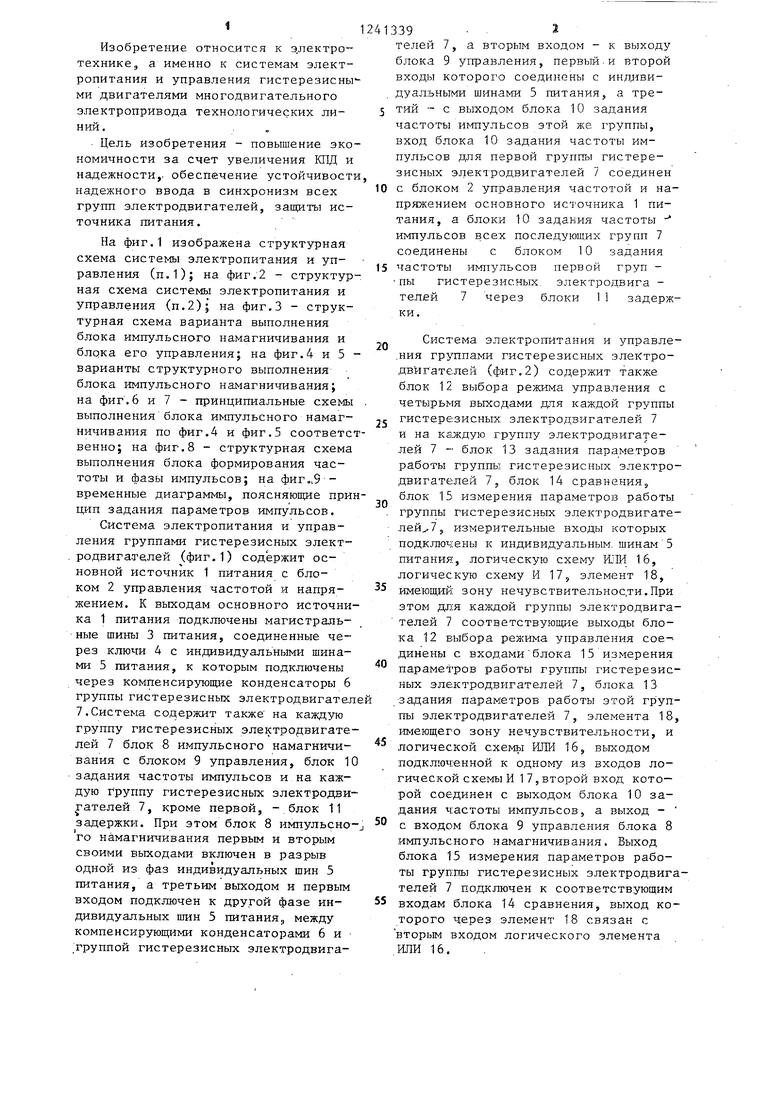
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации группы гистерезисных двигателей | 1984 |
|
SU1241390A1 |
| Электропривод переменного тока | 1985 |
|
SU1361698A1 |
| Устройство для управления конденсаторным гистерезисным электродвигателем | 1978 |
|
SU767924A1 |
| Система электропитания и управления гистерезисными электродвигателями | 1989 |
|
SU1777228A1 |
| Устройство для управления гистерезисным электродвигателем | 1984 |
|
SU1246318A1 |
| Гистерезисный электропривод | 1984 |
|
SU1270860A1 |
| Электропривод переменного тока | 1987 |
|
SU1508336A1 |
| Устройство для управления гистерезисным электродвигателем | 1981 |
|
SU974540A1 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
Изобретение относится к электротехнике, позволяет повысить надежность и экономичность системы электропитания и управления гистере- зисными электродвигателями за счет того, что последняя состоит из основного источника питания с блоком управления частотой и напряжением, подключенного выходом к магистральным шинам питания,- соединенным через ключи с индивидуальными шинами питания (ИШП), к которым подключены через компенсирующие конденсаторы группы гистерезисных электродвигателей (ГЭ). На каждую группу ГЭ приходится блок импульсного намагничивания (вин) с блоком управления (БУ), блок задания частоты импульсов. На каждую группу ГЭ, кроме первой, имеется блок задержки, причем ВИН первым и вторым выходами включен в разрыв .одной из фаз ИОШП, а третьим выходом и первым входом подключен к другой фазе ИШП между компенсирующими конденсаторами и группой ГЭ, а вторым входом - к выходу БУ, первый и второй входы которого соединены с ЙШ11, а третий - с выходом блока задания частоты импульсов этой же группы. Вход блока задания частоты импульсов для первой группы ГЭ соединен с блоком управления частотой и напряжением основного источника питания, а блоки задания частоты импульсов всех последующих групп соединены с блоком задания частоты импульсов первой группы ГЭ через блоки задержки . 1 з.п. ф- лы , 9 ил. i (Л
о
IPi/S.
L L L
(Риг.
cp(jf.5
QJus.S
Фаз. 7
Фи.9
Редактор И.Касарда
Составитель М„Кряхтунова
Техред- О.Сопко Корректор О Луговая
Заказ 3606/49 Тираж 631 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и от,крытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ ИЗ ПРУЖИННЫХ СТАЛЕЙ МАРТЕНСИТНОГО КЛАССА | 2003 |
|
RU2244757C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мастяев Н.З., Орлов И.Н | |||
| Гисте- резисные электродвигатели | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вопросы теории и применения | |||
| М.: Энер.гия, 1963 | |||
| Делекторский Б.А., Тарасов В.Н | |||
| Импульсные возбудители для микромашин с магнитным возбуждением | |||
| Элек- тричество, № 6, 1978 | |||
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Орлов И.Н., Прудников С,В., Тара-, сов В.Н | |||
| Возможности гистерезисного электродвигателя в многодвигатель- ном | |||
| электроприводе, 1-982, вып | |||
| Регенеративный приемник | 1923 |
|
SU562A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| УСТРОЙСТВО ДЛЯ ТЕМПЕРИРОВАНИЯ ИЗДЕЛИЙ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ТЕМПЕРИРОВАНИЯ ИЗДЕЛИЙ | 2016 |
|
RU2726534C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
