Од сл ел
СП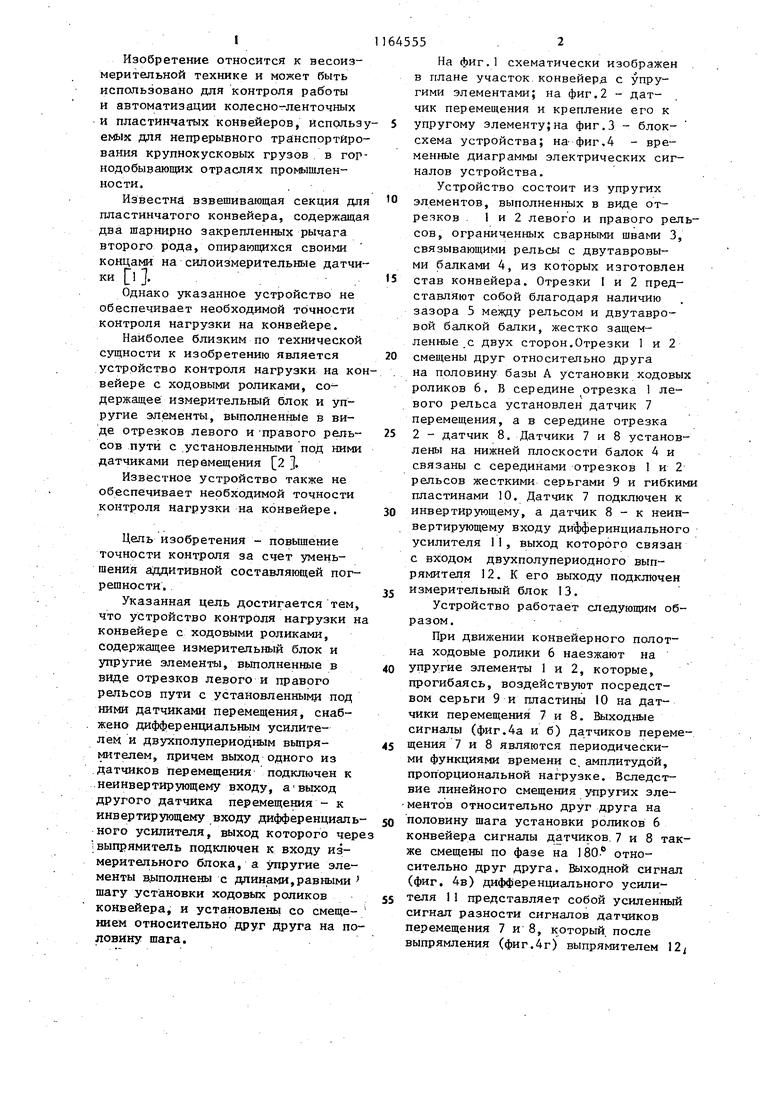
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухполупериодный выпрямитель | 1980 |
|
SU1001382A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ МЕХАНИЧЕСКОГО И ЭЛЕКТРИЧЕСКОГО ОБОРУДОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2474506C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2178868C2 |
| Линейный преобразователь среднеквадратического значения переменного напряжения | 1989 |
|
SU1647428A1 |
| Устройство для измерения линейных размеров | 1989 |
|
SU1732155A1 |
| СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2001 |
|
RU2190860C2 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2454683C1 |
| ДАТЧИК КОНТРОЛЯ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1994 |
|
RU2095818C1 |
| Устройство для линеаризации и нормирования семейства характеристик сигнала переменного напряжения датчика измеряемого параметра | 1987 |
|
SU1578769A1 |
| УСТРОЙСТВО МОНИТОРИНГА И ВЫРАВНИВАНИЯ СТЕПЕНИ ЗАРЯЖЕННОСТИ АККУМУЛЯТОРОВ БЛОКА АКБ | 2022 |
|
RU2792305C1 |
УСТРОЙСТВО КОНТРОЛЯ НАГРУЗКИ НА КОНВЕЙЕРЕ С ХОДОВЫМИ РОЛИКАМИ, содержащее измерительный блок и упругие элементы, выполненные в виде отрезков левого и правого рельсов пути с установленными под ними датчиками перемещения, отличающееся тем, что, с целью повьшения точности контроля за счет уменьшения аддитивной составляющей погрешности, оно снабжено дифференциальным усилителем и дву сполупериодным выпрямит елем, причем выход одного из датчиков перемещения подключен к неинвертирующему входу, а выход другого датчика перемещения « к инвертирующему входу дифференциального усилителя, м,1ход которого через выпрямитель подключен к входу измерительного блока, а упругие зле- . менты выполнены о длинами, равными шагу установки ходовых роликов W конвейера, и установлень: со смещес нием относительно друг друга на половину щага.
pttl.t
I
Изобретение относится к весоизмерительной технике и может быть использовано для контроля работы и автоматизации колесно-ленточных и пластинчатых конвейеров, используемых для непрерывного тра нспортйрования крупнокусковых грузов в горнодобывающих отраслях промышленности.,
Известна взвешивающая секция для пластинчатого конвейера, содержащая два шарнирно закрепленных рычага второго рода, опирающихся свои№1 концами на силойзмерительные датчики i. : ,
Однако указанное устройство не обеспечивает необходимой точности контроля нагрузки на конвейере.
Наиболее близким по технической сущности к изобретению является устройство контроля нагрузки на конвейере с ходовыми роликами, содержащее измерительный блок и упругие элементы, выполненнь1е в виде отрезков левого и -правого рельсов пути с установленными под ними датчиками перемещения .
Известное устройство также не обеспечивает необходимой точности контроля нагрузки на конвейере.
Цель изобретения - повышение точности контроля за счет уменьшения аддитивной составляющей погрешности.
Указанная цель достигается тем, что устройство контроля нагрузки н конвейере с ходовыми роликами, содержащее измерительный блок и упругие элементы, выполненные в виде отрезков левого и правого рельсов пути с установленными под ними датчиками перемещения, снабжено дифференциальным усилителем и двухполупериодным вьтрямителем, причем выход одного из
.датчиков перемещения подключен к неинвертирующему входу, авыход другого датчика перемещения - к инвертирующему входу дифференциального усилителя, выход которого чер
1 выпрямитель подключен к входу измерительного блока, а упругие элементы выполнены с длинами,равными шагу установки ходовых роликов конвейера, и установлень со смещением относительно друг друга на половину шага.
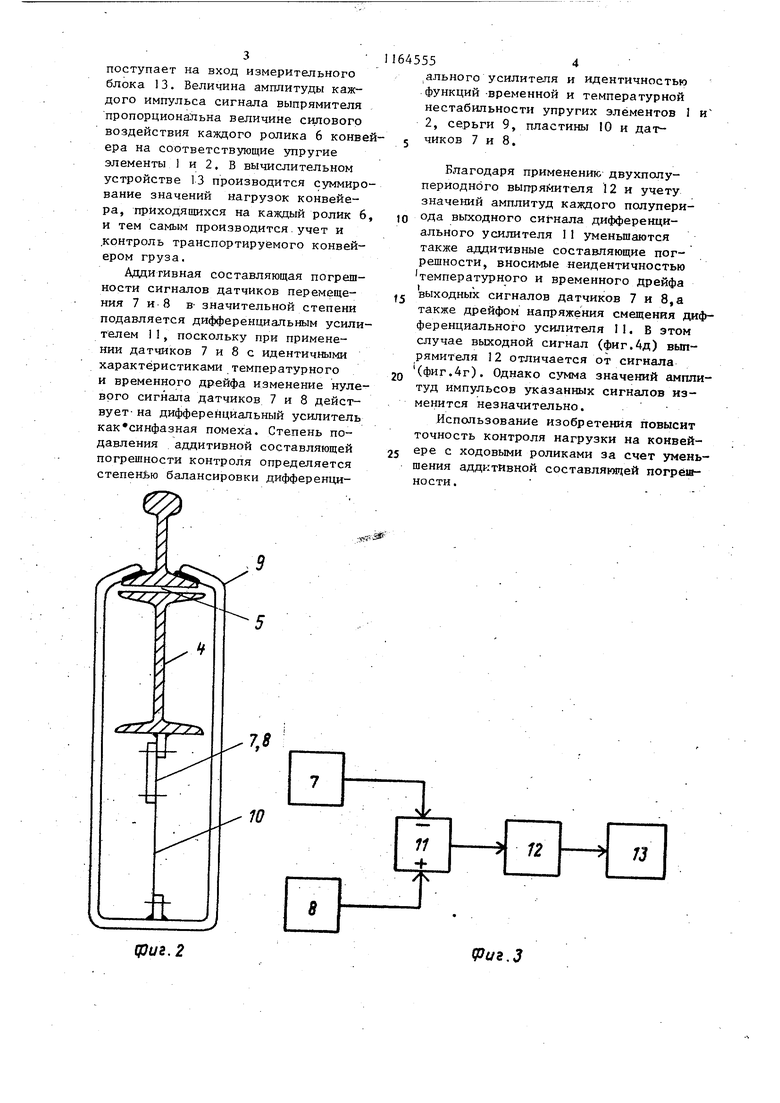
На фиг.1 схематически изображен в плане участок конвейерд с упругими элементами; на фиг.2 - датчик перемещения и крепление его к
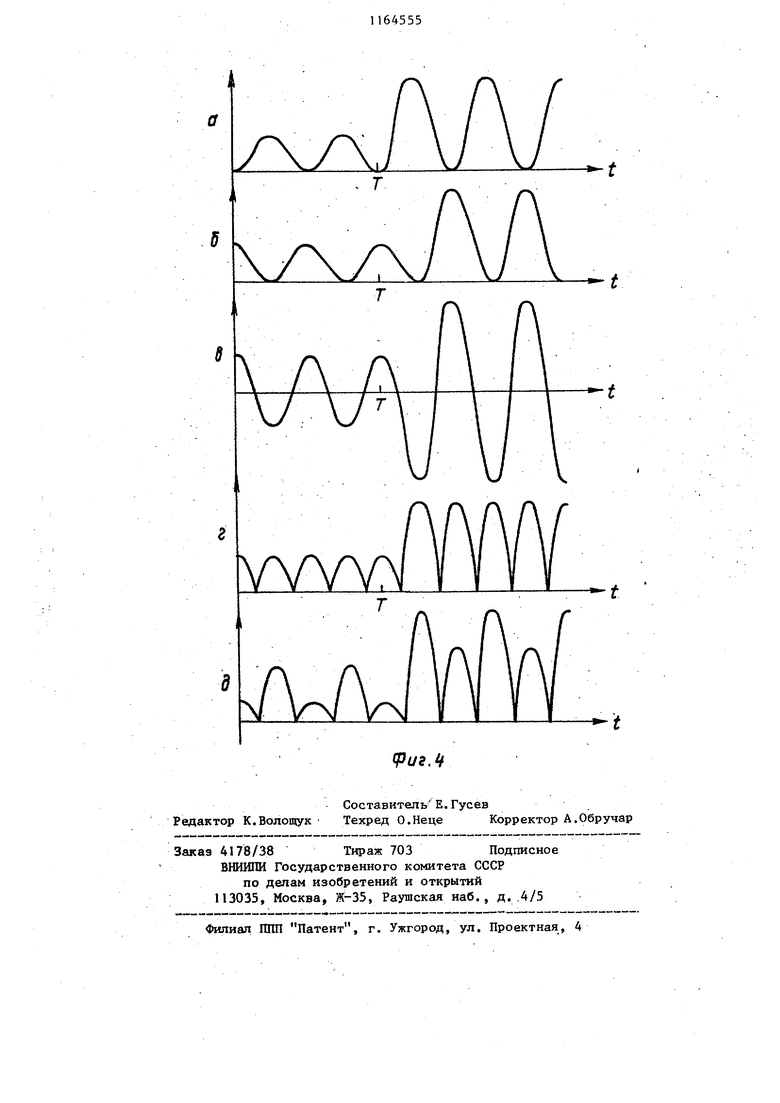
упругому элементу;на фиг.З - блоксхема устройства; на- фиг,4 - временные диаграммы электрических сигналов устройства.
Устройство состоит из упругих
элементов, выполненных в виде отрезков . 1 и 2 левого и правого рельсов, ограниченных сварными швами 3, связывающими рельсы с двутавровыми балками 4, из которых изготовлен
став конвейера. Отрезки I и 2 представляют собой благодаря наличию зазора 5 между рельсом и двутавровой балкой балки, жестко защемленные с двух сторон.Отрезки 1 и 2
смещены друг относительно друга
на половину базы А установки ходовых роликов 6. В середине отрезка 1 левого рельса установлен датчик 7 перемещения, а в середине отрезка
2 - датчик 8. Датчики 7 и 8 установлены на нижней плоскости балок 4 и связаны с серединами отрезков 1 и 2 рельсов жесткими серьгами 9 и гибкими пластинами 10. Датчик 7 подключен к
инвертирующему, а датчик 8 - к неинвертирующему входу дифферинциального усилителя 11, выход которого связан с входом двухполупериодного выпрямителя 12. К его выходу подключен
измерительный блок 13.
Устройство работает следующим образом.
При движении конвейерного полотна ходовые ролики 6 наезжают на
упругие элементы 1 и 2, которые, прогибаясь, воздействуют посредством серьги 9 и пластины 10 на датчики перемещения 7 и 8. Выходные сигналы (фиг.4а и б) датчиков перемещения 7 и 8 являются периодическими функциями времени с, амплитудой, пропорциональной нагрузке. Вследствие линейного смещения упругих элементов относительно друг друга на
половину шага установки роликов 6
конвейера сигналы датчиков. 7 и 8 также смещены по фазе на 1 ВО- относительно друг друга. Выходной сигнал (фиг. 4в) дифференциального усилителя 11 представляет собой усиленный сигнал разности сигналов датчиков перемещения 7 и 8, который, после выпрямления (фиг.4г) выпрямителем 12
поступает на вход измерительного блока 13. Величина амплитуды каждого импульса сигнала выпрямителя пропорциональна величине силового воздействия каждого ролика 6 конвей ера на соответствующие упругие элементы 1 и 2. В вычислительном устройстве 13 производится суммирование значений нагрузок конвейера, приходящихся на каждый ролик 6 и тем самым производится.учет и .контроль транспортируемого конвейером груза.
Аддитивная составляющая погрешности сигналов датчиков перемещения 7 и- 8 в- значительной степени подавляется дифференциальным усилителем II, поскольку при применении датчиков 7 и 8 с идентичШ11МИ характеристиками температурного и временного дрейфа изменение нулевого сигнала датчиков 7 и 8 действует- на дифференциальный усилитель каксинфазная помеха. Степень подавления аддитивной составляющей погрешности контроля определяется степенью балансировки дифференци(риг. 2
1645554
ального усилителя и идентичностью функций -временной и температурной нестабильности упругих элементов I и 2, серьги 9, пластины 10 и датчиков 7 и 8.
Благодаря применению двухполупериодного выпряК ителя 12 и учету значений амплитуд каждого полупериJO ода выходного сигнала дифференциального усилителя 11 уменьшаются также аддитивные составляющие погрешности, вносимые неидентичностью температурного и временного дрейфа выходных сигналов датчиков 7 и 8,а
f5 также дрейфом напряжения смещения дифференциального усилителя II. В этом случае выходной сигнал (фиг.Ад) выпрямителя 12 отличается от сигнала (фиг.4г). Однако сумма значений ампли20туд импульсов указанных сигналов изменится незначительно.
Использование изобретения повысит точность контроля нагрузки на конвейере с ходовыми роликами за счет уменьшения аддктнвной составлякмцей погрешности.
Vuz.3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU178131A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР | |||
| Устройство для взвешивания вагонов на ходу в составе поезда | 1971 |
|
SU437921A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
