Для определения положения объектов в водной среде применяются гидролокаторы, состоящие из задающего генератора, генератора задержки, импульсного генератора, вибратора, усилителя, схемы автоматической регулировки усиления, пульта управления с источниками питания, самописца, ждущего мультивибратора, спусковой ;схемы, измерителя дальности и релейной схемы управления.
Предлагаемый гидролокатор более соверщенен, так как он позволяет определять конфигурацию и объем подземных камер, созданных методом вымывания соляных залежей. Это достигается тем, что в нем применен фотоэлектрический ориентир, состоящий из фотоэлемента, закрепленного на корпусе гидролокатора, конденсера, латунного диска с прорезью и магнитной стрелкой, свободно вращающихся на остриях, который используется также для управления релейной схемой, которая осуществляет согласованную работу двигателей горизонтального и вертикального обзоров и задающего генератора и состоит из пяти реле и двух синхронных двигателей.
Для контроля герметичности камеры станции имеется датчик влажности, который предохраняет гидролокатор от аварии отключением на пульте управления всех видов питания от локатора при повыщенной влажности.
Для передачи поступательного и вращательного движений от двигателей через границу двух сред, находящихся иод высоким давлением, применено бессальниковое соединениеНа фиг. 1 изображена принципиальная схема предлагаемого гидролокатора; на фиг. 2-электрическая блок-схема его механизмов; на фиг. 3 - фотоэлектрический ориентир в двух проекциях.
Предлагаемый гидролокатор представляет собой автоматический самопищущий прибор, предназначенный для измерения по гидролокационному гринцйпу размеров камеры и их ориентирования по азимуту.
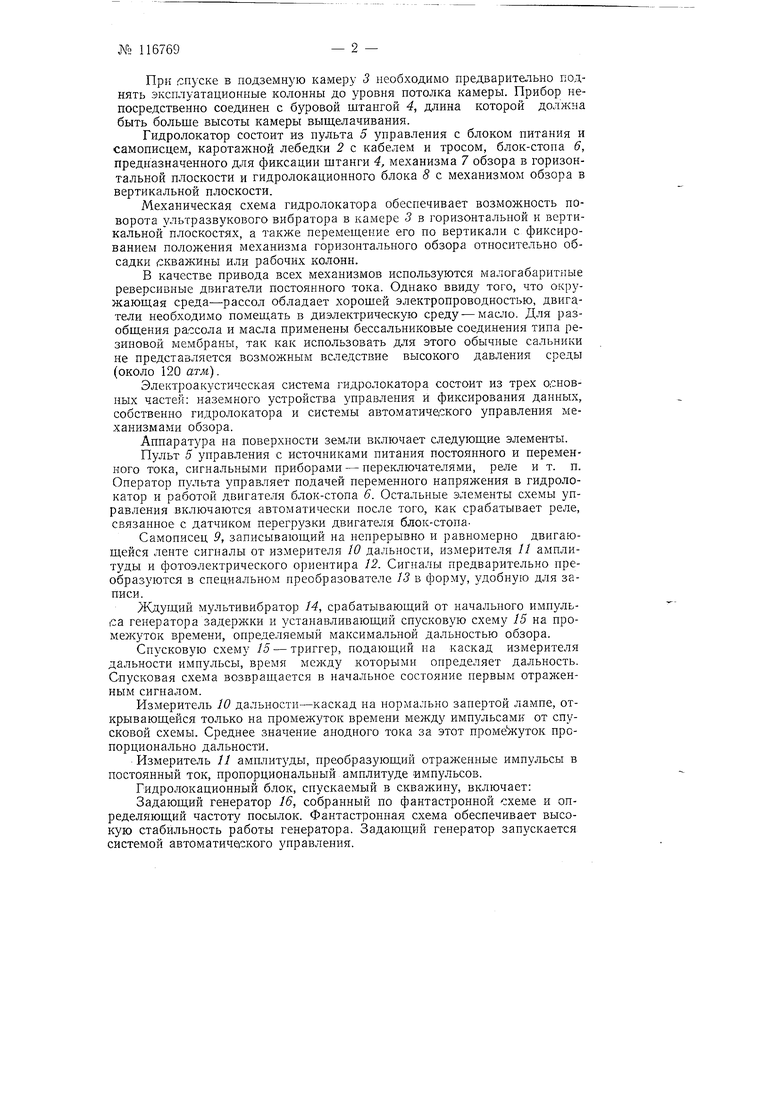
Прибор опускается в скважину на тросе / при помощи каротажной лебедки 2.
Я9 116769- 2 -
При .спуске в подземную камеру 5 необходимо предварительно поднять эксплуатационные колонны до уровня потолка камеры. Прибор непосредственно соединен с буровой штангой 4, длина которой должна быть больше высоты камеры выш,елачивания.
Гидролокатор состоит из пульта 5 управления с блоком питания и самописцем, каротажной лебедки 2 с кабелем и тросом, блок-стопа 6, предназначенного для фиксации штанги 4, механизма 7 обзора в горизонтальной плоскости и гидролокационного блока 5 с механизмом обзора в вертикальной плоскости.
Механическая схема гидролокатора обеспечивает возможность поворота ультразвукового вибратора в камере 3 в горизонтальной и вертикальной плоскостях, а также перемеш,ение его по вертикали с фиксированием положения механизма горизонтального обзора относительно обсадки (Скважины или рабочих колонн.
В качестве привода всех механизмов используются малогабаритные реверспвные двигатели постоянного тока. Однако ввиду того, что окружаюш,ая среда-рассол обладает хорошей электропроводностью, двигатели необходимо помещать в диэлектрическую среду - масло. Для разобщения рассола и масла применены бессальниковые соединения типа резиновой мембраны, так как использовать для этого обычные сальники не представляется возможным вследствие высокого давления среды (около 120 атм).
Электроакустическая система гидролокатора состоит из трех основных частей: наземного устройства управления и фиксирования данных, собственно гидролокатора и системы автоматиче ского управления механизмами обзора.
Аппаратура на поверхности земли включает следующие элементы. Пульт 5 управления с источниками питания постоянного и переменного тока, сигнальными приборами - переключателями, реле и т. п. Оператор пульта управляет подачей переменного напряжения в гидролокатор и работой двигателя блок-стопа 6. Остальные элементы схемы управления включаются автоматически после того, как срабатывает реле, связанное с датчиком перегрузки двигателя блок-стопаСамописец 9, записывающий на непрерывно и равномерно двигающейся ленте сигналы от измерителя 10 дальности, измерителя // амплитуды и фотоэлектрического ориентира 12. Сигналы предварительно преобразуются в специальном преобразователе 13 в форму, удобную для записи .
Ждущий мультивибратор 14, срабатывающий от начального импуль|Са генератора задержки и устанавливающий спусковую схему 15 на промежуток времени, определяемый максимальпой дальностью обзора.
Спусковую схему 15 - триггер, подающий на каскад измерителя дальности импульсы, время между которыми определяет дальность. Спусковая схема возвращается в начальное состояние первым отраженным сигналом.
Измеритель 10 дальности-каскад на нормально запертой лампе, открывающейся только на промежуток времени между импульсами от спусковой схемы. Среднее значение анодного тока за этот промежуток пропорционально дальности.
Измеритель 11 амплитуды, преобраззющий отраженные импульсы в постоянный ток, пропорциональный амплитуде импульсов.
Гидролокационный блок, спускаемый в скважинз включает: Задающий генератор 16, собранный по фантастронной схеме и определяющий частоту посылок. Фантастронная схема обеспечивает высокую стабильность работы генератора. Задающий генератор запускается системой автоматиче1ского управления.
Генератор 17 задержки, собранный также по схеме фантастрона и служащий для обеспечения работы АРУ.
Импульсный генератор 18 и вибратор 19, генерирующие высокочастотные ультразвуковые импульсы. Вибратор, кроме того, воспринимает все отраженные сигналы и преобразует их в вь сокочастотные импульсы напряжения. .
Усилитель 50, состоящий из высокочастотного усилителя, детектора и ка скадов усиления импульсов низкой частоты. Оконечный каскад его с катодной загрузкой согласовывает выходное сопротивление усилителя с сопротивлением кабеля.
Схему АРУ (21), которая вырабатывает в регулируемый промежуток времени импульс отрицательного напряжения, запирающего усилитель для прямых сигналов и снижающего усиление для си.чьных сигналов, отраженных от близких препятствий. При этом измерение амплитуды сигналов производится в другом масщтабе, но закономерность измерения амплитуды в зависимости от угла падения луча на препятствие сохраняется, т. е- можно установить направление луча, нормальное к отражающей поверхности.
Система автоматического управления механизмами обзора, содержит следующие элементы.
Фотоэлектрический ориентир 12, служащий для определения положения камеры относительно стран света и управления релейной схемой.
Релейную схему 22 управления, осуществляющую согласованную работу двигателей горизонтальпого 23 и вертикального 24, обзоров и задающего генератора. Схема управления состоит из пяти реле и двух синхронных двигателей, позволяющих проводить автоматически в строго определенной последовательности все операции полного обзора пространства на каждом уровне.
Датчик 25 влажности, предохраняющий гидролокатор от аварии путем отключения на пульте всех видов питания от локатора при повышении влажно1:ти, свидетельствующ.ем о нарушении герметичности.
Соединительная линия состоит из двужильного кабеля для питания от блока 26 двигателя блок-стопа и семижильного кабеля для питания релейной схемы и блоков гидролокатора, а также для передачи сигналов на поверхность земли.
Основным командным прибором системы автоматического управления является фотоэлемент 27 (или фотосопротивление), укрепленный на легком латунном диске 28 с радиальной прорезью 29, ориентированной па восток, и с магнитной стрелкой 30. Диск 28 со стрелкой 30 свободно вращается на остриях 31. Свет от линейного источника 32 света падаег через конденсер 33 на фотоэлемент в момент совмещения прорези 29 с. конденсером. При этом фотоэлемент подает сигнал на самописец 9, чтобы зафиксировать начальное положение ультразвукового вибратора, и на релейную схему 22, осуществляющую согласованную работу двигателя горизонтального и вертикального обзоров и задающего генератора 16.
Гидролокатор, состоящий из задающего генератора, генератора задержки, импульсного генератора, вибратора, усилителя, схемы автоматической регулировки усиления, пульта управления с источниками питания, самописца, ждущего мультивибратора, спусковой схемы, измерителя дальности и релейной схемы управления, отличающийся тем, что для определения положения камеры по направлению применен фотоэлектрический ориентир, ссстоящ,ий из фотоэлемента, закрепленного на корпусе гидролокатора, конденсера, латунного диска с прорезью и маг-т- 3 -JNS 11 бТБЭ
Предмет изобретения
нитнон стрелкой, свободно вращающцхся на остриях, который используется также для управления релейной,схемой, который осуще|Ствляет согласованную..работу двигателей горизонтального и вертикального обзоров и задающего генератора и состоит из пяти реле и двух синхронных двигателей, а для контроля герметичности камеры станции применен датчик влажности, который предохраняет гидролокатор от аварии отключением на пульте управления всех видов питания от локатора при повышенной влажности, для передачи же поступательного и вращательного движений от двигателей через границу двух сред, находящихся под высоким давлением, применено бессальниковое соединение
| название | год | авторы | номер документа |
|---|---|---|---|
| Скважинный гидролокатор | 1978 |
|
SU928284A1 |
| Скважинный гидролокатор | 1977 |
|
SU635444A1 |
| Устройство для подземного акустического исследования | 1975 |
|
SU584269A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| Электронный командный прибор | 1958 |
|
SU122673A1 |
| ГИДРОАКУСТИЧЕСКИЙ ПРИБОР ДЛЯ ОБНАРУЖЕНИЯ | 1966 |
|
SU187327A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ЭЛЕКТРОННОЙ РАЗВЕРТКИ | 1990 |
|
RU2012900C1 |
| Имитатор сигналов гидролокатора бокового обзора | 1982 |
|
SU1176276A1 |
| Устройство для автоматического включения и выключения машин, механизмов и приборов | 1936 |
|
SU52718A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТЕМПЕРАТУРОПРОВОДНОСТИ | 1969 |
|
SU239608A1 |


kv
fuz.3
