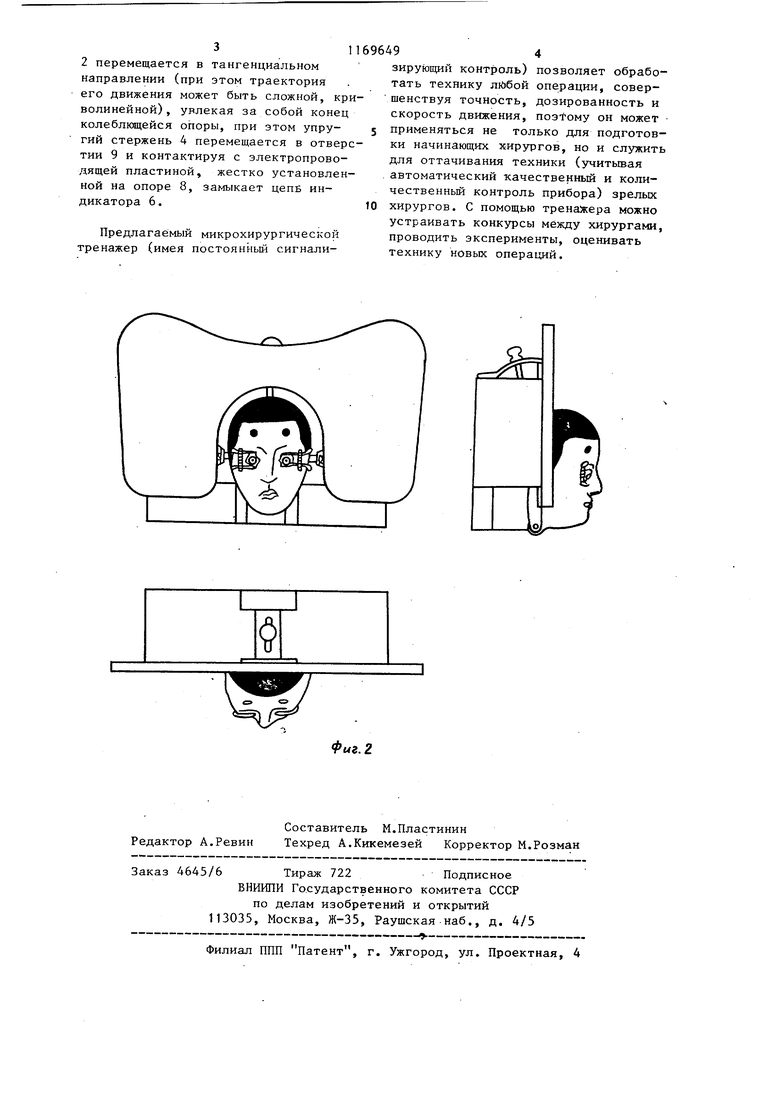
Изобретение относится к медицине в частности к хирургии и может быть использовано для обучения микрохирургической технике в офтальмологии нейрохирургии, сосудистой и рекойструктивной хирургии. Наиболее близким к предлагаемому является микрохирургический тренаже содержащий корпус с установленными в нем. фиксаторами для размещения би логических тканей Л . Однако на известном тренажере невозможно получение устойчивых навыков работы с,микрохирургическими инструментами, а условия, создающие ся при работе на нем далеки от реальных условий операций. Цель-изобретения является выявле ние травматичного хирургического во действия с моделированием подвижности глаза. Поставленная цель достигается тем, что микрохирургический тренаже содержащий корпус с установленными в нем фиксаторами для размещения биологических тканей, содержит опоРУ упругую пластину, укрепленную в корпусе и соединенную с фиксатором посредством упругого стержня, который пропущен через отверстие в пластине, жестко установленной на .опоре, а датчики горизонтального и вертикального перемещения соединены с индикатором. На фиг. 1 изображен микррхирургичейкий тренажер; на фиг. 2 изображен в трех проекциях тренажер, оснащенный подлокотником и маской с векорасширителями. Микрохирургический тренажер содержит корпус 1, фиксаторы 2, каждьй из которых оснащен прижимным кольцо 3, упругим стержнем 4, упругой плас тиной 5, индикатором 6, скобой 7, опору 8, пластину с отверстиями 9, иглодержатель Ю с откалиброванным датчиком 11 и пинцет 12 с откалибро ванным датчиком 13. Датчик горизонтального перемещения представляет собой упругий стержень 4 ,и пластину с отверстиями 9, при контактировании которых срабатывает индикатор 6. Датчик вертикального перемещения представляет собой упругую пластину 5 и скобу 7, при контактировании которых также срабатывает индикатор 6. Радиусы отверстий, через которые пропущены упругие стержни 4, соответствуют предельно допустимым горизонтальным перемещениям фиксаторов 2 в плоскости пластины с отверстиями 9. Расстояние между загнутыми краями скобы 7 соответствует предельно допустимой величине вертикального перемещения фиксатора 2. Микрохирургический тренажер работает следующим образом. В зависимости от степени подготовленности хирурга выбирается режим микрохирургического тренажера,наст--раивается датчик вертикального перемещения фиксатора 2, для чего упругая пластина 5 крепится на корпусе 1 с разной степенью жесткости (например, с посощью винтов или дополнительного подпружинивания), выбирается положение пластины с отверстиями 9, при этом настраивается датчик горизонтального перемещения фиксатора 2 (пластина с отверстиями, напри-, мер, смещается по вертикальной оси), выбирается заданное состояние биообъекта (например, можно, меняя степень фиксации биообъекта в емкости фиксатора 2 путем завинчивания прижимного кольца 3, добиться при операции на глазу нужного уровня внутриглазного давления). Устанавливается микроскоп (не показан). Хирург-стажер занимает свое место и включает электрическую схему микрохирургического тренажера. В ходе операции при приложении хирургом усилий, превышающих регламентированные, замыкаются контакты, сигнализирующие об ошибке, при превышении усилий, воздействующих на инструментарий (иглодержатель 10 и пинцет 12). срабатывают датчики 11 и 13, откалиброванные под определенное усилие при вертикальных воздействиях, превьшающих нормированное усилие (например, могущих повлечь выпадение с.текловидного тела при операции на глазу), срабатывает датчик вертикального перемещения по цепи, давление от фиксатора 2 по упругому токопроводящему стержню 4 передается токопроводящей упругой пластине 5, которая прогибается и контактирует с загнутым краем скобы 7, замыкая электрическую цепь индикатора 6, подключенного к источника питания. При горизонтальных воздействиях на биообъект фиксатор
311
2 перемещается в тангенциальном направлении (при этом траектория его движения может быть сложной, криволинейной) , урлекая за собой конец колеблкщейся опоры, при этом упругий стержень 4 перемещается в отверстии 9 и контактируя с электропроводящей пластиной, жестко установленной на опоре 8, замыкает цепЁ индикатора 6.
Предлагаемый микрохирургической тренажер (имея постоянный сигнали696494
зируклций контроль) позволяет обработать технику лйбой операции, соверщенствуя точность, дозированность и скорость движения, поэтому он может 5 применяться не только для подготовки начинающих хирургов, но и служить для оттачивания техники (учитьшая автоматический качественный и количественный контроль прибора) зрелых to хирургов. С помощью тренажера можно устраивать конкурсы между хирургами, проводить эксперименты, оценивать технику новых операций.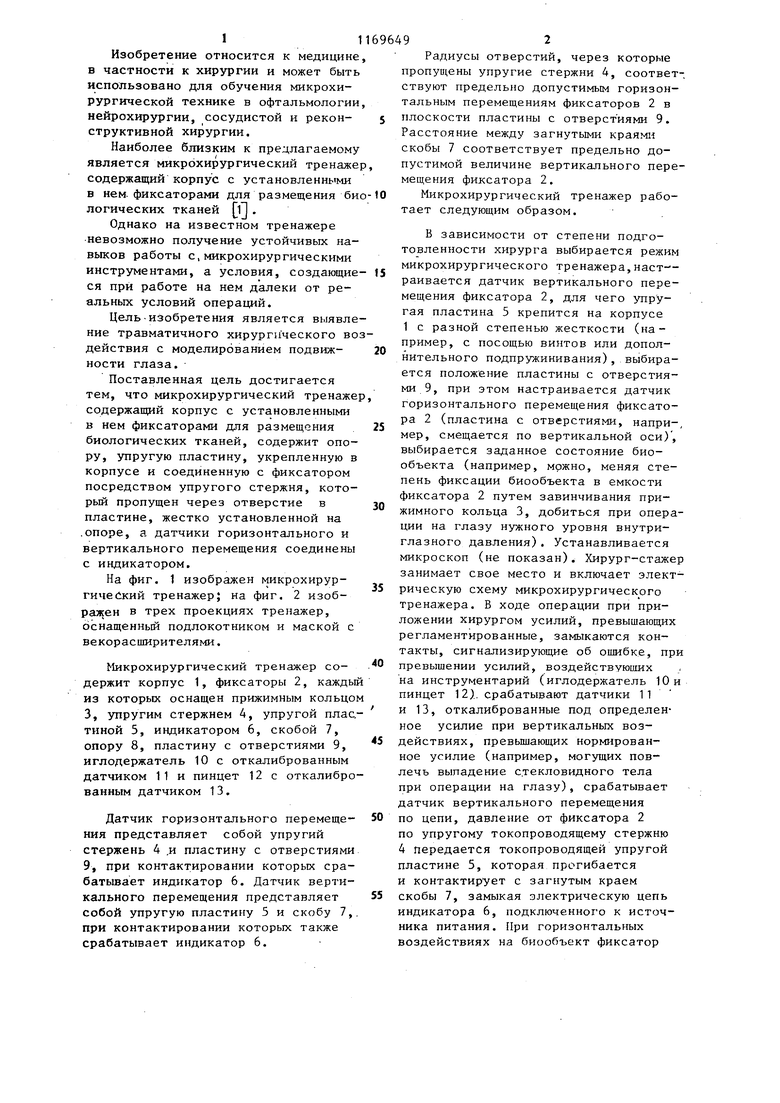
| название | год | авторы | номер документа |
|---|---|---|---|
| Набор инструментов для синустрабекулэктомии | 2017 |
|
RU2639852C1 |
| УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ И ОТРАБОТКИ МИКРОХИРУРГИЧЕСКОЙ ТЕХНИКИ | 2018 |
|
RU2679297C1 |
| Набор инструментов для антиглаукомной операции - дренирующей аутоклапанной лимбосклерэктомии | 2016 |
|
RU2618895C1 |
| Тренажер для обучения технике коронарного шунтирования на работающем сердце | 2020 |
|
RU2743246C1 |
| СПОСОБ ПЛАСТИКИ НОСОСЛЕЗНОГО СОУСТЬЯ ПРИ ЭНДОНАЗАЛЬНОЙ ЭНДОСКОПИЧЕСКОЙ ДАКРИОЦИСТОРИНОСТОМИИ | 2007 |
|
RU2335264C1 |
| Иглодержатель хирургический | 2021 |
|
RU2764871C1 |
| НАБОР ИНСТРУМЕНТАРИЯ ДЛЯ МАЛОИНВАЗИВНЫХ СОСУДИСТЫХ ОПЕРАЦИЙ | 2005 |
|
RU2306873C2 |
| СПОСОБ ВРЕМЕННОЙ ГЕРМЕТИЗАЦИИ РОГОВИЧНОЙ РАНЫ | 2008 |
|
RU2369363C1 |
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
| Устройство для отработки навыков микрохирургической техники | 2020 |
|
RU2759411C2 |
МИКРОХИРУРГИЧЕСКИЙ ТРЕНАЖ содержащий корпус с установленными в нем фиксаторами для размещения биологических тканей,о т л и ч а rout и и с я тем, что, с целью выявления травматичного хирургического воздействия с моделированием подвижности глаза, он содержит опору, упругую пластину, укрепленную в корпусе и соединенную с фиксатором посредством упругого стержня, который пропущен через отверстие в пластине, жестко установленной на- .опоре, а датчики горизонтального и вертикального перемещения соед,инены с индикатором. . .
/
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
