Изобретение относится к горной электротехнике, преимущественно к устройствам дистанционного и аварийного отключения поточно-транспортных механизмов (например, конвейеров), имеющих большую протяженность и рабочий орган которых может смещаться в сторону от направления транспортирования груза. При этом линия связи для отключения привода должна обладать защитным отказом, т. е. при обрыве или коротком ее замыкании привод механизма должен автоматически отключаться. j Целью изобретения является повышение уА жности устройства с обеспечением переживи трех сигналов блокировки по одной аре проводщ я ии связи.
в й«и черте ке представлена электрическая схема, выполненная согласно изобретению.
Устройство содержит источник питания переменного тока 1, первый компаратор 2, второй компаратор 3, третий компаратор 4, первый преобразователь сигналов 5, второй преобразователь сигналов 6, двухпроводную линию связи 7 и 8, кабель-тросовые выключатели 9, концевой диод 10, датчики контроля положения рабочего органа 11 с замыкающим контактом 12, последовательно к которым включены резисторы 13 и диоды 14.
Первый преобразователь сигналов 5 - преобразователь сигналов состояния выключателей 9 - и величины сопротивления щлейфа проводов 7 и 8 выполнен в виде первого резисторного измерительного моста и состоит из диода 15, резистора 16, диода 17, резистора 18, диода 19, резистора 20 и диода 21. Первое плечо составлено из резистора 16 и диода 17, второе плечо - из резистора 18 и диода 19, третье плечо - из резистора 20, а четвертое плечо представляет собой суммарное сопротивление диодов 21 и 10 и распределенное сопротивление шлейфа проводов 7 и 8 (на чертеже не показано).
Второй преобразователь сигналов 6 - преобразователь контроля состояния датчиков 11 и замыкания проводов 7 и 8 - выполнен в виде второго резисторного измерительного моста, состоящего из диода 22, резисторов 23, 24, 25, диода 26, резистора 27 и диода 28. Первое плечо второго моста составлено из резисторов 23 и 24, второе плечо - из резистора 25 и диода 26, третье плечо - из резистора 27, четвертое плечо- из диодов 28, сопротивления шлейфа проводов 7 и 8 и элементов 13 и 14 одного из датчиков 11.
Выходная диагональ первого моста выход первого преобразователя сигналов 5 соединен с входом первого компаратора 2- управляющим его входом, основная выходная диагональ второго измерительного моста - первый выход второго преобразователя сигналов 6 соединен с входом второго компаратора 4, дополнительная выходная диагональ того же моста - второй выход второго
преобразователя сигналов 6 соединен с входом третьего компаратора 4.
Выходная диагональ первого преобразователя сигналов 5 образуется двумя элект, рическими точками между катодом диода 17 с резистором 18 и между анодом диода 21 с резистором 20. Эти точки отмечены стрелками.
Основная и дополнительная диагонали второго преобразователя сигналов 6 также
0 образуются соответственно электрическими точками между элементами: катодом диода 28 с резистором 27 - общая точка двух диагоналей и точками между резисторами 24 и 25 и другая точка дополнительной диагонали между резисторами 23 и 24.
Вторыми входами компараторы 2, 3, 4 привязаны к соответствующим опорным напряжениям, заданным в зависимости от необходимых порогов переключения компараторов (опорные входы компараторов не
0 представлены).
Выходные сигналы компараторов 2, 3, 4 связаны с целью отключения привода конвейера (или механизма, не показан).
Устройство работает следующим образом. В исходном состоянии при наличии напряжения питания от блока 1, целости проводов 7 и 8, замкнутых контактах выключателей 9, разомкнутых контактов 12, датчиков 11 измерительные мосты оказываются разбалансированными, с выходов преобразователей сигналов 5 и 6 поступают сигналы на управляющие входы соответствующих компараторов 2, 3, 4. Следовательно, выходные сигналы этих компараторов дают разрещение на управление приводом механизма. Это выполняется благодаря тому, что указанные сигналы превышают заданные уровни опорных сигналов компараторов. Измерительные мосты преобразователей сигналов 5 и 6 оказываются разбалансированными потому, что в первом мосте произведение значений сопротивлений резистора 16
0 с диодом 17 на сопротивление шлейфа проводов 7 и 8 с учетом прямого значения сопротивлений диодов 21 и 10 меньше, чем тпоизведение значений сопротивлений резистора 20 на сопротивление резистора 18 с учетом прямого сопротивления диода 19, т. е.
потенциал точки между элементами 17 и 18 выше потенциала между элементами 20 и 21. В этом случае выходной сигнал первого преобразователя имеет положительный знак, что необходимо для нормальной работы комQ паратора. Аналогично оказывается разбалансированным второй измерительный мост, но по другой причине, так как контактами 12 датчика 11 оказывается отключенным четвертое плечо моста, состоящее из резистора 13 и диода 14. Знаки выходных сигналов второго преобразователя в этом случае также оказываются положительными.
Размыкание любого из контактов выключателей 9 в проводе 8 приводит к перебалансировке моста первого преобразователя 5, выходной его сигнал меняет свой знак на отрицательный, на выходе компаратора 2 появляется сигнал блокировки - отключается привод конвейера. При этом положительные сигналы в измерительных диагоналях моста второго преобразователя 6 не изменяются. Это объясняется тем, что второй мост питается однополупериодным напряжением, сдвинутым по фазе на 180 эл. град, по отношению к питанию первого моста и, кроме того, четвертое плечо второго моста уже оказывается отключенным контактом 12 датчика 11, поэтому дополнительное отключение провода 8 выключателем 9 ничего не изменяет в схеме устройства.
Возврат в исходное состояние контактов выключателя 9 приводит к появлению на выходе первого компаратора 2 сигнала разрешения на управление приводом.
При работе конвейера его лента может сместиться от рабочего положения, что создает аварийную ситуацию, поэтому привод коивейера должен отключиться. Эту функцию
выполняет датчик 11 при воздействии на него рабочего органа.
В этом случае балансируется мост преобразователя 6 по дополнительной диагонали, на выходе компаратора 4 появляется другой сигнал блокировки - отключается привод конвейера. Следует подчеркнуть, что срабатывание датчика 11 не оказывает влияния на выходной сигнал первого преобразователя сигналов 5.
Таким образом, по двухпроводной линии связи передаются две независимые команды на отключение привода механизма.
Замыкание проводов 7 и 8 линии связи является аварийным режимом, что требует также отключение привода конвейера. В этом
случае происходит перебалансировка второго моста по основной и дополнительной диагоналям, следовательно, на входах компараторов 3 и 4 появляются сигналы отрицательного знака. Под действием опорных сигналов
на их выходах появляются два сигнала блокировки, отключающих также привод конвейера.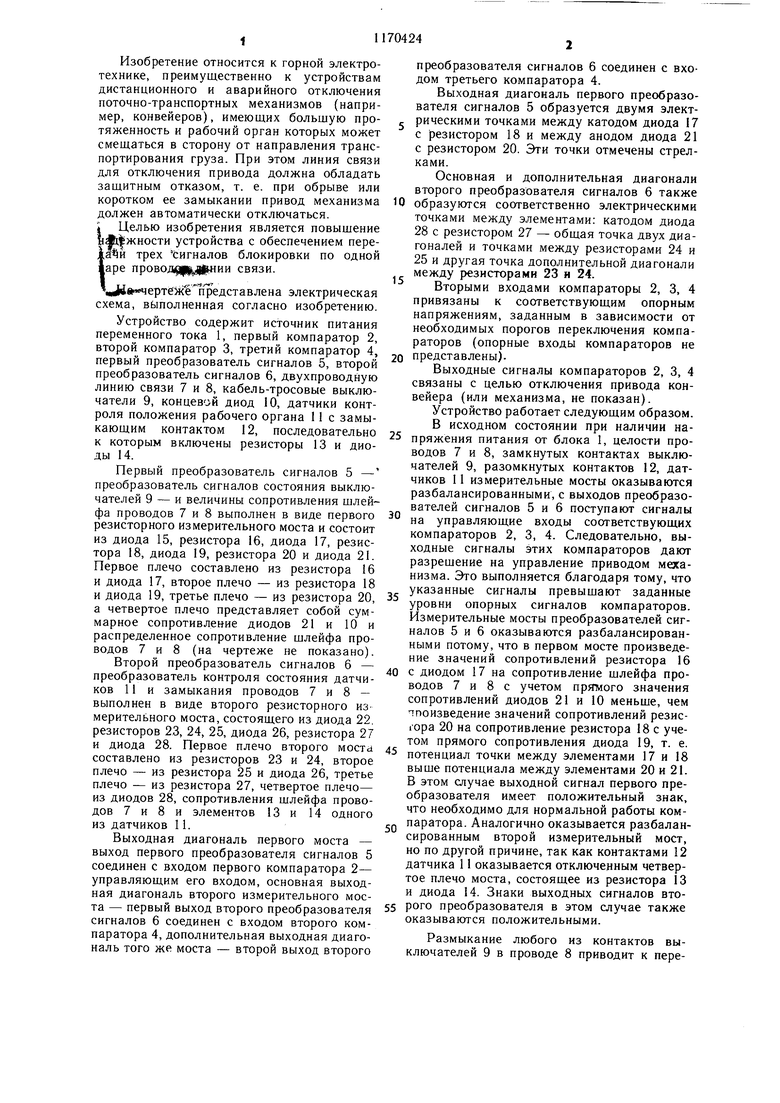

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аварийной остановки привода с самоконтролем линии связи | 1987 |
|
SU1471173A1 |
| Устройство для контроля состояния распределенных объектов | 1985 |
|
SU1285509A1 |
| Устройство для контроля и сигнализации о состоянии распределенных объектов | 1987 |
|
SU1608719A1 |
| Устройство для измерения давлений | 1988 |
|
SU1818560A1 |
| ЭЛЕКТРОННЫЙ ТЕРМОРЕГУЛЯТОР ДЛЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2078371C1 |
| Устройство блокировки привода конвейера | 1987 |
|
SU1474039A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
| Устройство дистанционного отключения забойных механизмов | 1982 |
|
SU1122822A1 |
| Устройство для контроля состояния @ параллельно соединенных вентилей | 1985 |
|
SU1249641A1 |
| Устройство для дифференциально-фазной защиты | 1982 |
|
SU1113866A1 |
УСТРОЙСТВО БЛОКИРОВКИ ПРИВОДА, содержащее источник питания, первый вывод которого соединен с после-- - Л 3|1ДЯ lAT.,.,;;, гехйй : , И довательно соединенными выключателями и катодом диода, анод которого соединен с входами датчиков, выходы которых соединены с точкой соединения выключателей, а также три компаратора, отличающееся тем, что, с целью повышения надежности устройства, дополнительно введены два преобразователя сигналов, первые входы которых соединены с входами датчиков, вторые входы - с первым выводом источника питания, третьи входы - с вторым выводом источника питания, выход первого преобразователя соединен с входом первого компаратора, первый выход второго преобразователя сигналов соединен с входом второго компаратора, а второй выход - с входом третьего компаратора. с (Л 11 4ib 7 V tN9 4
| ЭКСТРЕННОГО ОСТАНОВА И СИГНАЛИЗАЦИИ ДЛЯ ШАХТНЫХ КОНВЕЙЕРОВ | 0 |
|
SU244271A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для дистанционного управления электрическими аппаратами | 1972 |
|
SU505088A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
