Изобретение относится к медицинской технике, в частности предназначено для исследования функций вестибулярной сенсорной системы.
Цель изобретения - сокращение времени диагностики.
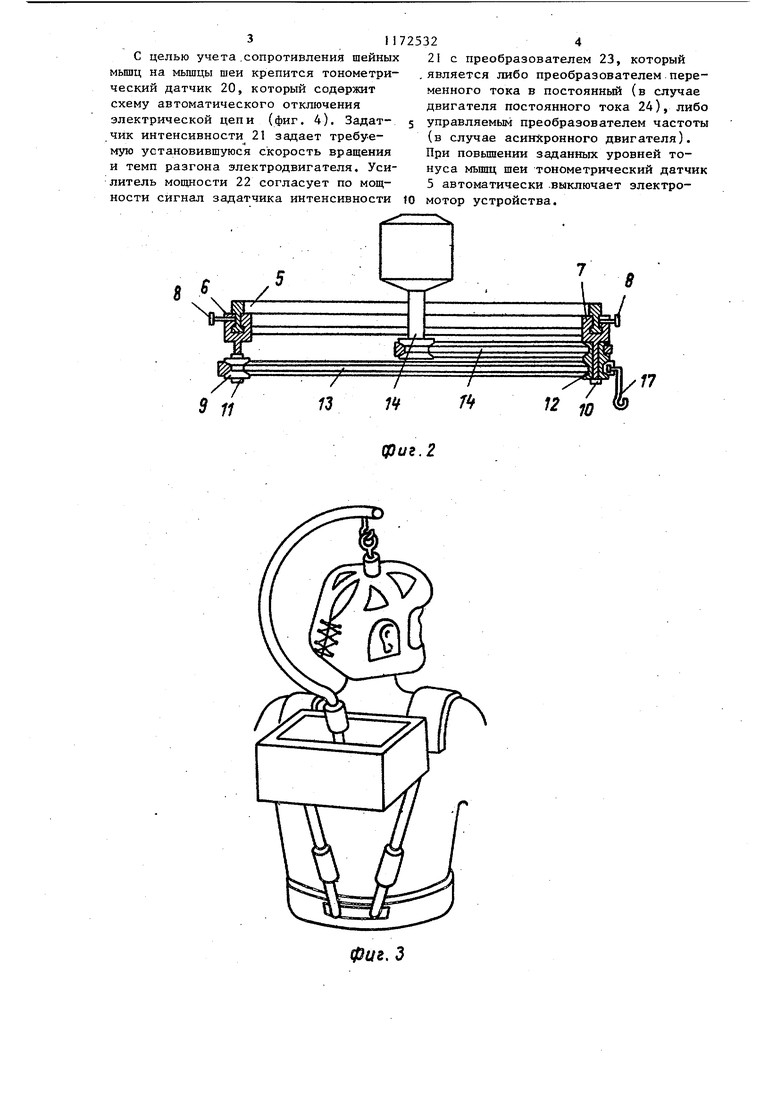
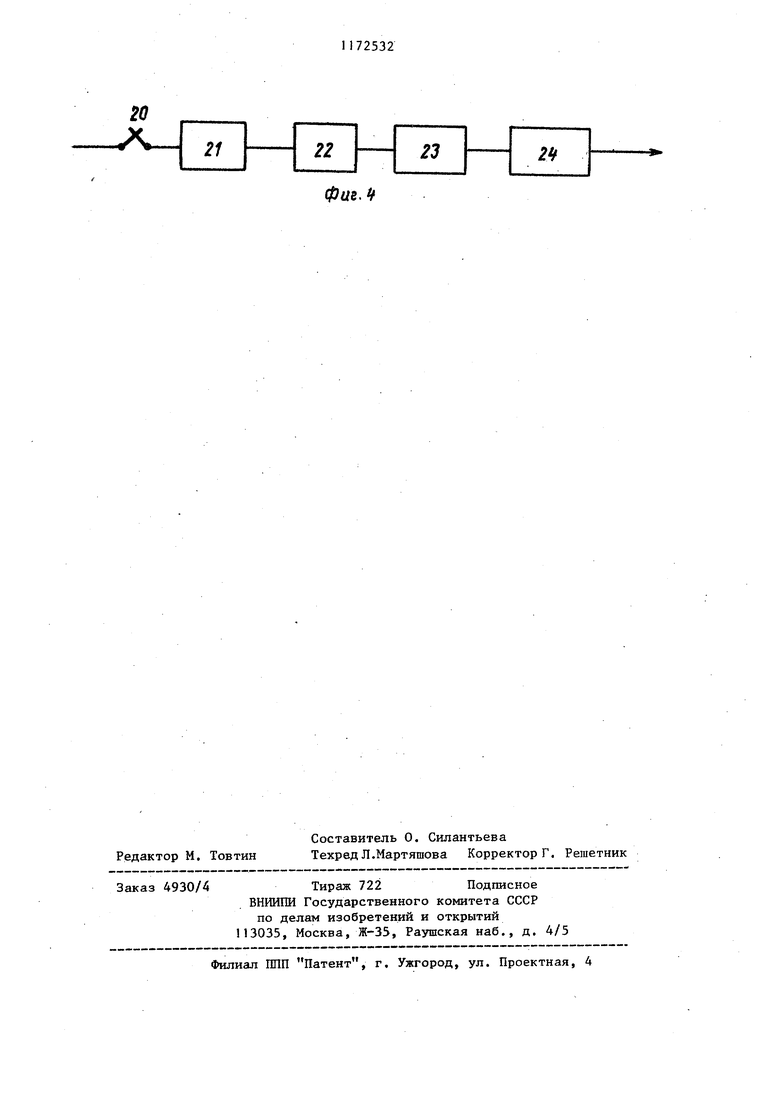
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 концентрическая направляющая, разрез; на фиг. 3 - один из вариантов конструкции автономного устройства на спине пациента; на фиг. 4 - схема электродвигателя с тонометрическим датчиком.
На.спине пациента с помощью пояса и дугообразных упоров 2 закреплены цилиндрические опоры 3, имеющие цанговые зажимы 4 для изменения длины опор 3. На опорах 3 над головой испытуемого установлена концентрическая направляющая 5, содержащая ползуны 6 и 7, которые могут неподвижно закрепляться на направляющей 5 с помощью резьбовых винтов 8. Ползны- 6 и 7 имеют-вертикальные оси 9 и 10, на которых расположены цилиндрические ролики 1 и 12, соединенные между собой гибкой связью 3, причем ролик 12 связан через дополнительную гибкую связь 14 с валом злектромотора 15, установленного строго соосно на упорной планке 16 над концентрической направляющей 5. Гибкая связ
13роликов 11 и 12 имеет на внешней стороне крючок 17, соединенный шаровидным шарниром 18 со шлемом 19 ис пытуемого.
Сопряжение и связи элементов устройства. Концентрическая направляюща 5 с электромотором 15 установлены на опорах 3 соосно и неподвижно. Опоры 3 закрепляются на туловище непо.г движно. Ползуны 6 и 7 при работе устройства устанавливаются неподвижно с помощью резьбовых винтов 8.
Ролики 1) и 12 на осях 9 и 10, вал электромотора, гибкие связи 13 и
14установлены подвижно. Крючок 17 закреплен неподвижно, но двигается вместе с гибкой связью 13 по замкнутой окружности. 11пем 19 закреплен на голове испытуемого неподвижно.
Устройство работает следующим образом.
Шлем 19 закрепляется на голове испытуемого, а концентрическая направляющая 5 с опорами 3 на туловище пациента с помощью пояса 1 и упоров 2. В соответствии с программой исследования ползуны 6 и 7 закрепляются неподвижно строго по диаметру винтами 8, обеспечивая необходимое натяжение гибких связей 13 и 14. Крючок 17 посредством шаровидного шарнирд. 18 соединяется, со шлемом 19 исптуемого. Включается и начинает вращаться вал электромотора 15.
Вращение вала через гибкую связь 14 передается на ролик 12, а вращение ролика 12 через гибкую связь 13 передается другому ролику 11, Гибкая связь 13 с крючком 17 начинает бесконечно двигаться в какой-то заданной плоскости. При этом голова со шлемом I9 осуществляет пассивные движения в этой же плоскости. Устанавливая в различных местах ползуны 6и 7 по диаметру направляющей 5 можно менять угол плоскости, в которой осуществляются пассивные осцилляции головы испытуемого. Дозировка скорости движения головы осуществляется регулировкой оборотов вала электромотора 1
Угол отклонения головы от сагиттальной оси регулируется высотой распололсения направляющей 5 над головой испытуемого (выше - ниже).
- Располагая концентрическую направляющую 5 справа - слева, впереди сзади-под различным углом можно расширить диапазон исследований.
Осуществление осцилляции головы .по окружности, С направляющей 5 снимается один ползун 7 и гибкие связи 13 и 14. Ползун 6 подвижно устанавливается на направляющей 5 и прочной планкой (не обозначена) жестко крепится к валу электромотора 15. Шлем 19 испытуемого через шаровидный, шарнир Ш крепится к ползуну 6. При вращении вала электромотора 15 начинает вращаться планка с ползуном 6, который двигается по концентрической направляющей 5. Голова испытуемого со шлемом 19, соединенным с ползуном 6, осуществляет движения по окружности. С целью регистрации активной работы мьшгц шеи движения по окружности головы пациента с ползуном 6 осуществляются противоходом вращению вала электродвигателя. При этом электродвигатель работает в режиме торможения. Величина тока, поданного на обмотку электродвигателя, характеризует дозировку усилий мышц пациента.
С целью учета .сопротивления шейных мышц на мьшцы шеи крепится тонометрический датчик 20, который содержит схему автоматического отключения электрической цепи (фиг. 4), Задатчик интенсивности 21 задает требуемую установившуюся скорость вращения и темп разгона электродвигателя. Усилитель мощности 22 согласует по мощности сигнал задатчика интенсивности
21 с преобразователем 23, который является либо преобразователем переменного тока в постоянный (в случае двигателя постоянного тока 24), либо управляемым преобразователем частоты (в случае асинхронного двигателя). При повьщ1ении заданных уровней тонуса мышц шеи тонсметрический датчик 5 автоматически .выключает электромотор устройства.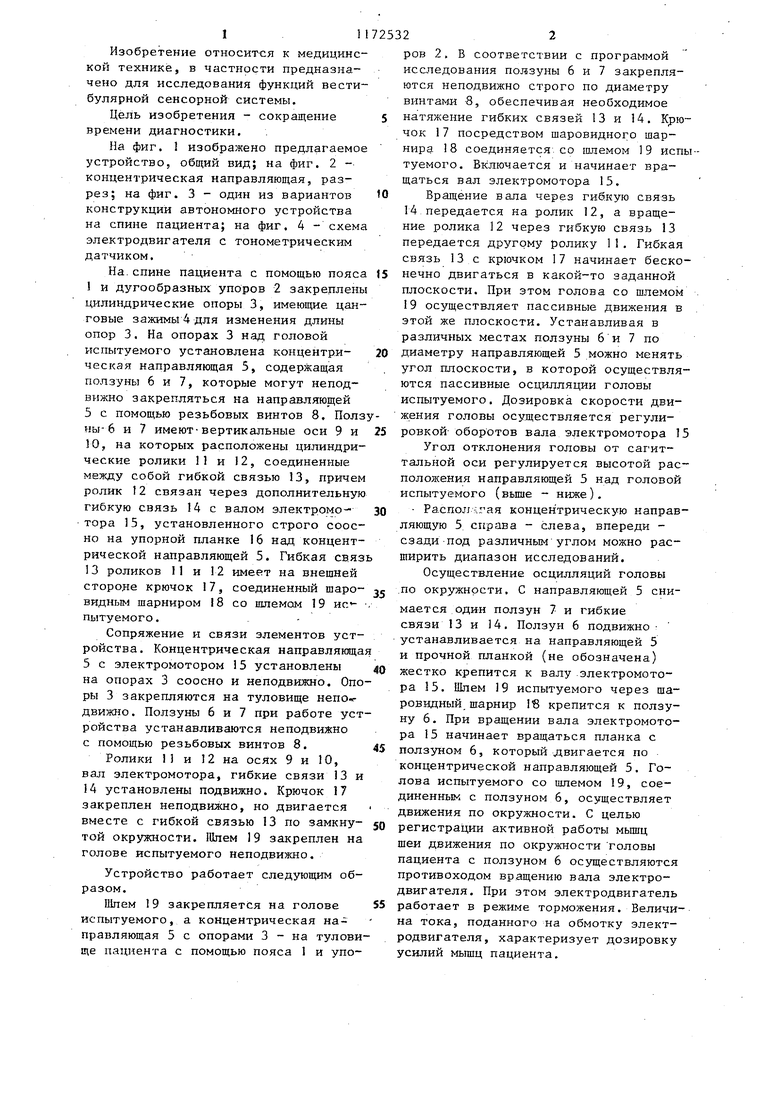
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки вестибулярной сенсорной системы | 1985 |
|
SU1258380A1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И ШЛЕМ, ЖИЛЕТ, ПОЯС, ПЕРЧАТКА, ЛОЖЕМЕНТ ДЛЯ ПРЕДПЛЕЧЬЯ, ЛОЖЕМЕНТ ДЛЯ ГОЛЕНИ, ЛОЖЕМЕНТ ДЛЯ СТОПЫ, ПЛАТФОРМА ДЛЯ НОГ | 2005 |
|
RU2302274C1 |
| Приспособление для лечебной гимнастики | 1987 |
|
SU1509073A1 |
| СПОСОБ ЛЕЧЕНИЯ КЛИНИЧЕСКИХ ФОРМ ОСТЕОХОНДРОЗА ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2122393C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО МЕХАНОТЕРАПИИ ВИСОЧНО-НИЖНЕЧЕЛЮСТНОГО СУСТАВА | 2018 |
|
RU2674236C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВЕРТЕБРАЛЬНЫЙ ТРЕНАЖЕР | 2001 |
|
RU2181275C1 |
| Устройство для снятия напряжения в шее | 2011 |
|
RU2607367C9 |
| Устройство для вытяжения и фиксации шейного отдела позвоночника | 1990 |
|
SU1801443A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ ШЕИ | 2014 |
|
RU2536399C1 |
УСТРОЙСТВО ДЛЯ ОЦЕНКИ ВЕС БУЛЯРНОЙ СЕНСОРНОЙ СИСТЕМЫ, содержащее шлем для головы, соединенный элементами крепления с электройриводом, отличающее СЯ тем. что, с целью сокращения времени диагностики, оно содержит телескопические опоры, на которых установлена концентрическая направляющая с двумя ползунами, в которых расположены ролики, соединенные бесконечной гибкой связью, содержащей на внешней стороне элемент крепления, а один из роликов связан с электромотором, и последовательно соединенные тонометрический датчик и блок автоматического отключения,.выход которого соединен с входом электропривода. ./5 .
фиг.2
фиг, 3
Фаг.Ч
| Петухов С | |||
| В | |||
| Проблемы космической биологии | |||
| Управление физиол гическими процессами и их моделиро вание | |||
| Т | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
