1
Изобретение предназначено для управления динамическими объектами в которых ненаблюдаемые переменные заменяются их прогнозируемыми значениями, и может эффективно работать в условиях большой априорной неопределенности, изменчивости параметров объекта управления и сильных помех.
Класс объектов, для управления которыми можно использовать предложенное адаптивное устройство, ограничен быстродействием системы регулирования (tp) и периодом собственных колебаний объекта.
Время регулирования (tp) складывается из времени вычисления управляющего воздействия временисрабатывания исполнительного механизма и времени запаздывания выходного сигнала. Шаг дискретизации ДТ должен быть равен или больше времени регулирования, чтобы при каждом новом измерении можно было получать новую информацию.
С другой стороны, шаг &t ограничен частотой колебаний объекта управления, В случае управления процессом, имеющим колебательньй характер, на отрезке, где производная не изменяет знака, должно уместиться не менее шести интервалов &ti три интервала для производства четырех измерений и три прогнозных интервала. Если Т - период -собственных колебаний, то производная меняе знак через интервал 1/2, на котором должно разместиться не менее 6 /ut . Таким образом tp .
определяет класс объектов, управление которыми эффективно с использо ванием предложенного адаптивного устройства.
Целью изобретения является повышение точности управления.
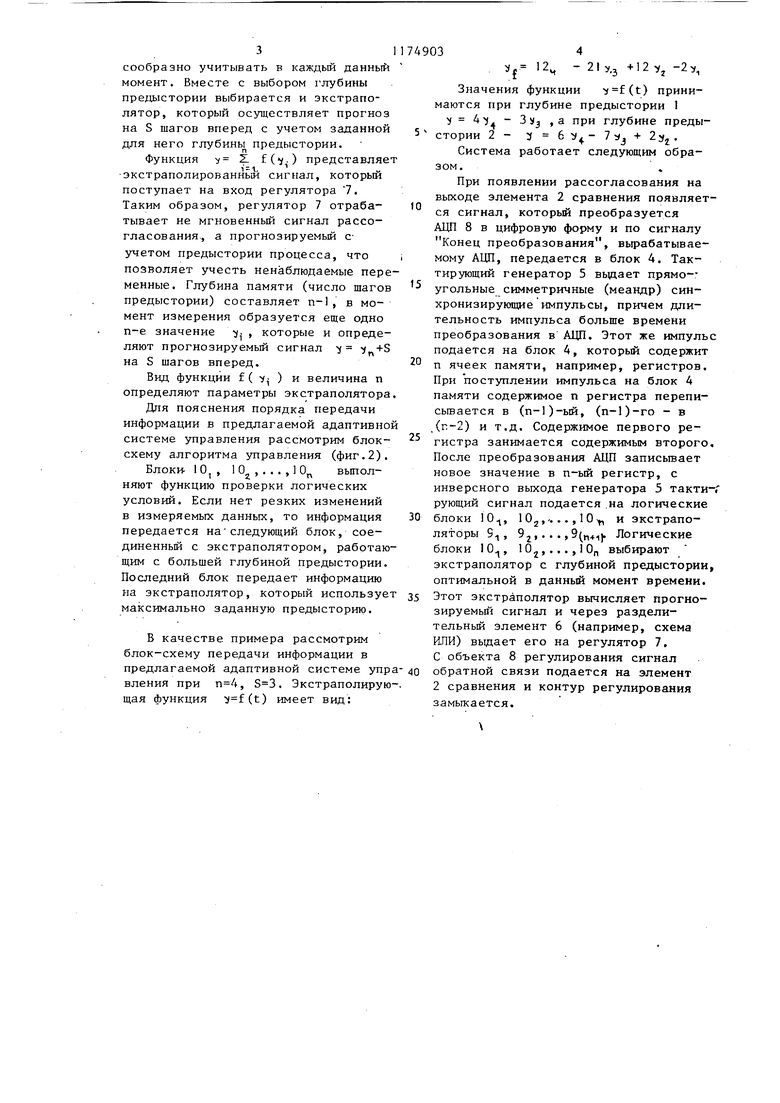
На фиг.1 представлена блок-схема предлагаемой системы управления; на фиг,. 2 - блок-схема алгоритма управления.
Адаптивная система управления содержит задатчик 1, элемент 2 сравнения, аналого-цифровой преобразователь 3j блок 4 памяти, тактирующий генератор 5, разделительный элемент 6, регулятор 7, объект 8 регулирования, (п+1) зкстраполяторов 9;,, 92, 9э, 9,..., 9(„„,и п логических блоков Ю, 02 -ИОп
49032
Логические блоки 10, 1 0„
определяют знак произведения двух разностей и могут быть реализованы каждый в виде последовательно соединенных дифференциального усилителя и логической схемы И-ИЛИ.
Экстраполяторы 9, (n+i/ представляют собой известные дискретные сглаживающие фильтры, коэффициенты которых определяются видом экстраполирующей функции.
Накопленная информация (предыстория) считается полезной, если функдня () не претерпевает резких изменений со сменой знака производной. Функция (t) задана своими дискретньши значениями, равностоящими на шаг d t. Тогда условие сохранения знака производной на i-ом
шаге
(i/, ,) -(V., - 2.°Если знаки разностей одинаковы, то на згчастке от t . ДО i величина :/ (t) не претерпевает резких изменений и величины :. , могут вносить полезную информацию для вычисления прогнозируемого значения у . В противном случае, когда
знаки разностей не одинаковы, предыстория (значение и все пре. ,ие) не должна учитываться.
При изменении глубины предыстории функция (t) меняет свой вид,
поэтому для каждого значения учитываемой глубины предыстории предусмотрен свой экстраполятор.
Два частных случая имеют важное значение для обеспечения быстродействия системы; вход в зону регулирования (сброс рассогласования до нуля), Vi 0 выход из зоны регулирования (наброс рассогласования) , -. 0, -у, , V -У-.
Первьй и второй логические блок входа в зону и блок выхода из зоны регулирования и два первых экстраполятора работают по приведенным алгоритмам. Блоки определяют пригодность накопленной информации
при сбросах и набросах регулируемой величины в области нуля рассогласования и выдают управляющий сигнал на регулятор v 0 при сбросе и
при набросе.
Таким образом, логические блоки .10, 10j,...10f, служат для выбора глубины предыстории, которую целесообразно учитывать в каждьй данный момент. Вместе с выбором глубины предыстории выбирается и экстраполятор, который осуществляет прогноз на S шагов вперед с учетом заданной для него глубины предыстории. Функция у Z f(v-) представляе . экстраполированный сигнал, который поступает на вход регулятора 7. Таким образом, регулятор 7 отрабатывает не мгновенный сигнал рассогласования, а прогнозируемый сучетом предыстории процесса, что позволяет учесть ненаблюдаемые пере менные. Глубина памяти (число шагов предыстории) составляет п-1, в момент измерения образуется еще одно п-е значение -j- , которые и определяют прогнозируемый сигнал - на S шагов вперед. Вид функции f( v ) и величина п определяют параметры экстраполятора Для пояснения порядка передачи информации в предлагаемой адаптивно системе управления рассмотрим блоксхему алгоритма управления (фиг.2) Блоки- 10, 1 0 , . . . , 1 0 выполняют функцию проверки логических условий. Если нет резких изменений в измеряемых данных, то информация передается наследующий блок, соединенный с экстраполятором, работаю щим с большей глубиной предыстории Последний блок передает информацию на экстраполятор, который используе максимально заданную предысторию. В качестве примера рассмотрим блок-схему передачи информации в предлагаемой адаптивной системе уп вления при , . Экстраполиру щая функция (t) имеет вид: 34 у 12 - 21 хз 1 2 :/ -2V, Значения функции (t) принимаются при глубине предыстории 1 xf 4-5 - Зу ,а при глубине предыстории 2- + 2:. Система работает следующим образом. При появлении рассогласования на выходе элемента 2 сравнения появляется сигнал, который преобразуется АЦП 8 в цифровую форму и по сигналу Конец преобразования, вьфабатываемому АЦП, передается в блок 4. Тактирующий генератор 5 вьщает прямо- угольные симметричные (меандр) синхронизирующие импульсы, причем длительность импульса больше времени преобразования в АЦП. Этот же импульс подается на блок 4, который содержит п ячеек памяти, например, регистров. При поступлении импульса на блок 4 памяти содержимое п регистра переписьшается в (п-1)-ый, (п-1)-го - в ,(п-2) и т.д. Содержимое первого регистра занимается содержимым второго. После преобразования АЦП записьшает новое значение в п-ый регистр, с инверсного выхода генератора 5 такти-. рующий сигнал подается .на логические блоки 10, lOj,...., 10- и экстраполяторы 9, 9j,.. . ,. Логические блоки 10, 102,...,10п выбирают экстраполятор с глубиной предыстории, оптимальной в данньй момент времени. Этот экстраполятор вычисляет прогнозируемьш сигнал и через разделительный элемент 6 (например, схема ИЛИ) выдает его на регулятор 7, С объекта 8 регулирования сигнал обратной связи подается на элемент 2 сравнения и контур регулирования замыкается.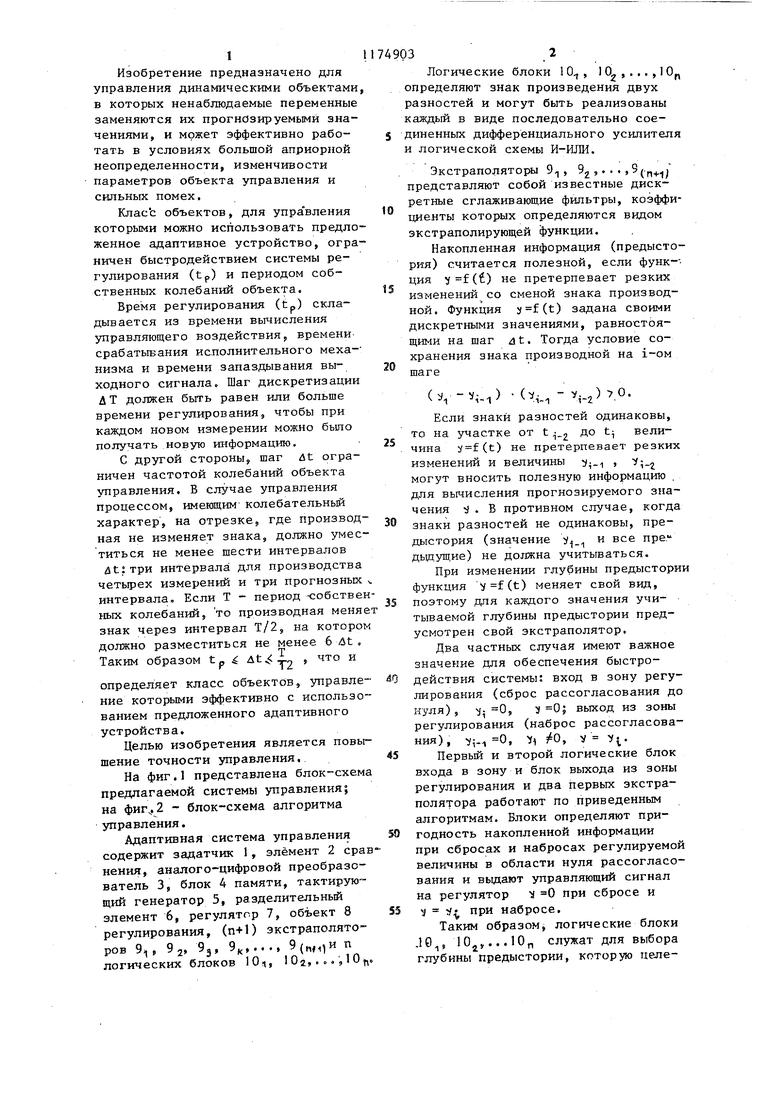
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2446461C2 |
| Адаптивная система управления | 1987 |
|
SU1472872A2 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2517322C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2517317C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2450343C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2449350C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2470359C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2475831C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2446454C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2451328C1 |
АДАП-ЩВНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные задатчик, элемент сравнения, аналого-цифровой преобразователь и блок памяти, состоящий из ячеек памяти, тактирующий генератор, последовательно соединенные разделительный элемент и регулятор, подключенный выходом к входу объекта регулирования, выход которого соединен с вторым входом элемента сравнения, и (п+1) экстраполяторов, отличающаяся тем, что, с целью повьш1ения точности управле-; НИН, в нее введены п логических блоков, причем информационный вход iVtfii .-:, i.; .e,,, первого логического блока соединен с первым выходом блока памяти, управляющий вход первого экстраполятора соединен с управляющим входом первого логического блока и с первым выходом тактирующего генератора, второй вход которого соединен с вторыми входами аналогоцифрового преобразователя, и блок памяти, второй вькод которого сое- динен с первым информационным входом второго логического блока, второй информационный вход которого соединен с первым выходом первого § логического блока, первый, второй и третий информационные входы К-го СО () логического блока соединены соответственно с (К-2)-/К-1)- и К-ым выходами блока памяти, а четвертый информационный вход К-го логического блока соединен с первым выходом (K-l)-ro логического блока, информационный вход каждого К-го экстраполятора соединен соотJia ветственно с вторым выходом каждого К-го логического блока, а информа ;о ционньй вход (п+1)-го экстраполятоо ра соединен с первым выходом п-го 00 логического блока, выходы всех (п+1)-ьгх экстраполяторов соединены с соответствующими входами разделительного элемента.
| Борэенко И.М,, Петров А.Г | |||
| Математические метода дпя решения, задачи контроля и управления | |||
| М.: Машиностроение, 1978, с.64 | |||
| Патент США № 4054780, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
