Устройство относится к информац онно-измерительной технике и может быть использавано в машиностроении и энергетике для измерения динамической деформации с помощью тензорезисторных моЬтовых преобразователей располагаемых на вращающихся валах. Цель изобретения - повьппение точности. На чертеже изображена структурная схема устройства. Устройство состоит из статорной части 1 и роторной части 2. Статорна часть 1 содержит последовательно сое диненные кварцевый генератор 3, формирователь 4 интервала измерения, схему 5 совпадения, счетчик 6. Выход кварцевого генератора 3 соединен с последовательно соединенными усилите лями 7 мощности и первой статорной обмоткой 8. Вторая статорная обмотка 9 соединена с вторым входом схемы 5 совпадения. Роторная часть 2 содержи две роторные обмотки 10 и 11, выпрямитель 12, входами соединенный с пер вой роторной обмоткой 10, а выходомс входом стабилизатора 13 двухполярного напряжения, питающую роторную часть , тензорезисторный мостовой датчик 14, три резистора 15-17, дифференциальный усилитель 18 и преобра зователь 19 сигнала тензорезисторног мостового датчика в частоту. Парафазные выходы преобразователя 19 Сигнала мостового датчика в частоту соединены с диагональю питания мостового датчика 14, измерительная, диагональ которого соединена с сигнальными входами преобразователя 19. Резисторы 15-17 соединены последовательно, причем крайние выводы резисторов 15 и 17 соединены с входами, выпрямителя 12, а выводы резистора 16 соединены с входами дифференциального усилителя 18, выход которого соединен с управляющим входом преобразователя 19. Информационный выход преобразователя 19 соединен с второй роторной обмоткой 11. Преобра зователь 19 тензорезисторного местового датчика содержит переключатель 20, делитель 21 частоты, масштабный усипитель 22, три резистора 23-25, ключ 26, интегратор 27, компаратор 28, формирователь 29, два триггера 30 и 31. Устройство работает следующим образом. Частота кварцевого генератора 3 через усилитель 7 мощности и первую статорную обмотку 8 поступает в первую роторную обмотку 10. Напряжение с роторной обметки 10 подается в выпрямитель 12, с выхода которого поступает в стабилизатор 13 двухполярного напряжения, выходные сигналы которого используются для питания роторной части 2. Одновременно сигнал кварцевой частоты с роторной обмотки 10 поступает через-резисторы 15-17 на входы дифференциального усилителя 18, выходной сигнал которого управляет работой преобразователя 19 сигнала тензорезисторного мостового датчика в частоту. Выходная частота преобразователя 19 передается через вторую роторную обмотку 11 и через вторую статорную обмотку 9 на вход схемы 5 совпадения, которая открывается по другому входу на время, задаваемое формирователем 4 интервала измерения. Счетчик 6 накапливает импульсы с преобразователя 19 сигнала тензорезисторного датчика в частоту в течение интервала измерения. Преобразователь сигнала тензорезисторного мостового датчика в частоту работает следующим образом. Через переключатель 20 двухполярное стабилизированное напряжение со стабилизатора 13 подается на диагональ питания тензорезисторного мостового датчика 14. Пусть на интервале 6 положение переключателя 20 , таково, что напряжение на выводе резистора 23 отрицательное, а на выводе резистора 25 положительное. Напряжение с вькода датчика 14 через масштабньй усилитель 22 и резистор 24 поступает на вход интегратора 27. В начале интервала t положение триггера 30 таково, что ключ 26 открыт. Пусть резистор 23 много больше резистора 25, тогда импульс с выхода дифференциального усилителя 18 поступает на С-вход триггера 30, ключ 26 отключается, на вход интегратора 27 подается только напряжение через резистор 23 при выходном сигнале датчика, равном нулю. Поэтому накопительный элемент интегратора начинает перезаряжаться, изменяя отрицательное выходное напряжение интегратора в положительную сторону, и в определенный момент перейдет
31
нулевой уровень, компаратор 28 изменит свое состояние на противоположное и через формирователь 29 даст разрешение на D-вход .триггера 30, но срабатьшает триггер от первого следующего после этого импульса, приходящего на С-вход триггера с дифференциального усилителя 18. С выхода триггера 30 осуществляется управление временем, в течение которого на интегратор 27 поступает опорное напряжение через резистор 25. Частота сброса этого напряжения-интегратором, а значит и начальная выходная частота преобразования, соответствующая нулевой нагрузке датчика, определяется отношением резисторов 23 и 25 и периодом частоты импульсов, поступающих на С-вход триггера 30, которая равна частоте импульсов кварцевого генератора 3. При изменении выходного сигнала мостового датчика 14 происходит алгебраическое суммирование токов, проходящих через резисторы 23 и 24, т.е. скорость накопления напряжения интегратором увеличивается или уменьшается, а значит изменяется частота сброса этого напряжения. Изменение этой частоты относительно начальной пропорционально нагрузке, датчика.
Сигнал с дифференциального усилителя 18 поступает на делитель 21 частоты, а с него - на D -вход триггера 31, который дает разрешение, но срабатывает триггер от первого, слеД5 ющего после этого импульса, приходящего на С-вход триггера 31 с выход триггера 30. При перебросе триггера 31 происходит перекидывание переключателя 20 в положение, соответствующее работе на интервале t j, когда напряжение на выводе резистора 23
74
положительное, а на выводе резистора 25 отрицательное. Работа преобразователя на интервале t2 аналЕогична работе на интервале t., изменяется лишь рабочий фронт компаратора при переходе интегратора через нуль, так как на интервале t интегратор стремится перейти нуль, перезаряжаясь от отрицательного значения в положительную сторону (фронт компаратора положительный), а на интервале tj интегратор стремится перейти нуль, перезаряжаясь от положительного значения в отрицательную сторону (фронт компаратора отрицательный). Задача формирователя 29 - формирование одинакового фронта на интервалах t и t.
Таким образом, в предлагаемом устройстве преобразователь сигнала тензорезисторногс мостового датчика вьшолняется по структуре преобразователя с импульсным звеном обратной связи, стабильность длительности импульса которого обеспечивается кварцевым генератором, расположенным па статорной части. Это увеличивает точность и упрощает устройство, так как позволяет использовать одну передающую систему для управления преобразователем и обеспечения питания роторной части. Кроме того, иcпoль зование частоты TOI;O же кварцевого генератора для формирования интер- . вала измерения счетчика позволяет выбрать интервал измерения кратным периоду переключения тензорезисторного мостового датчика, что увеличивает точность за счет исключения аддитивных погрешностей масштабного усилителя и интеграторов, входящих в состав преобразователя сигнала мостового датчика в частоту.
L..1J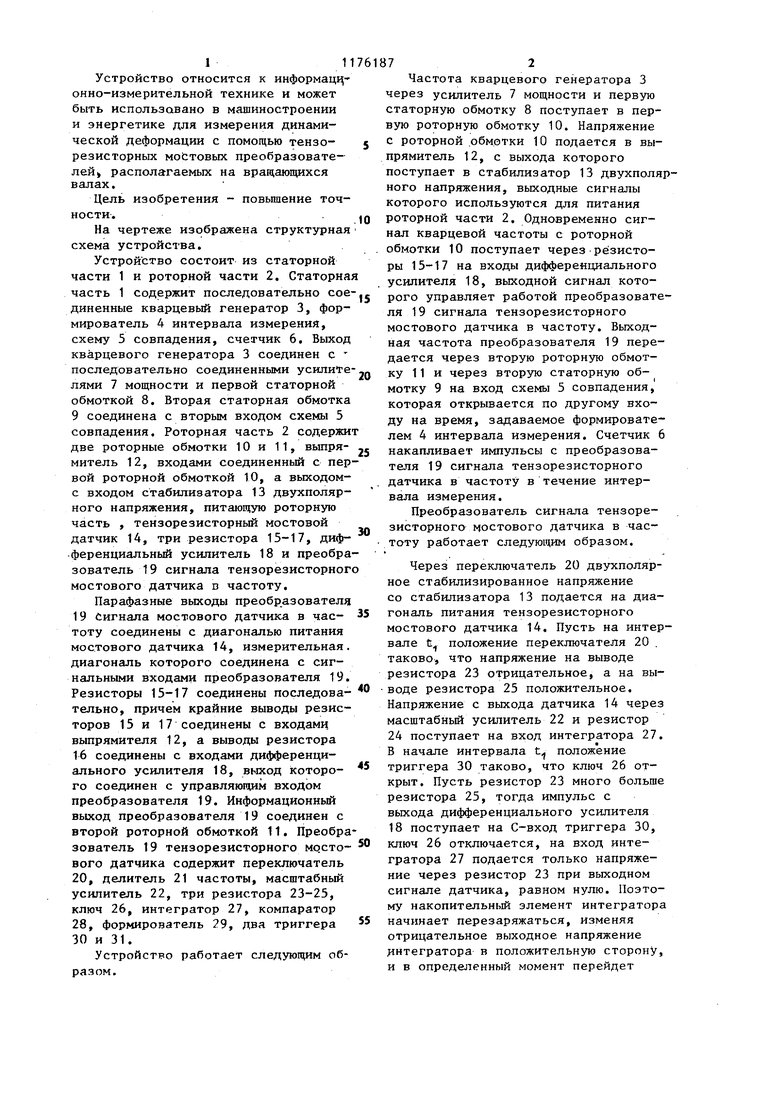
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН В ЦИФРОВОЙ КОД | 1991 |
|
RU2020745C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| Устройство для преобразования сигнала мостового датчика в частоту | 1978 |
|
SU782150A1 |
| Устройство преобразования сигналаМОСТОВОгО дАТчиКА B чАСТОТу | 1979 |
|
SU839049A1 |
| ДАТЧИК ДАВЛЕНИЯ НА ОСНОВЕ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ С ЧАСТОТНЫМ ВЫХОДНЫМ СИГНАЛОМ | 2009 |
|
RU2408857C1 |
| Преобразователь электрических сиг-НАлОВ МОСТОВыХ дАТчиКОВ B чАСТОТу | 1978 |
|
SU813773A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ НА ОСНОВЕ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ С ЧАСТОТНЫМ ВЫХОДНЫМ СИГНАЛОМ | 2009 |
|
RU2398196C1 |
| Преобразователь электрического сигнала мостового датчика в частоту | 1982 |
|
SU1026301A1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 1999 |
|
RU2162238C1 |
| Тензорезисторное устройство | 1983 |
|
SU1221484A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕС1СИХ ПАРАМЕТРОВ ВРА1ЦАКЩИХСЯ ВАЛОВ, состоящее из статорной части, содержащей усилитель мощности и связанную с ним первую статорную обмотку, последовательно соединенные кварцевый генератор, формирователь интервала измерения, схему совпадения, и счетчик, причем второй вход схемы совпадения соединен с второй статорной обмоткойj и роторной части, содержащей последовательно соединенные первую роторную обмотку, выпрямитель, стабилизатор двухполярного напряжения питания роторной части, преобразователь сигнала тензорезистррного мостового датчика в частоту, парафазные выходы которого соединены с диагональю питания тензорезисторного мостового датчика, измерительная диагональ которого соединена с сигнальными входами преобразователя сигнала мостового датчика в частоту, информационный выход которого соединен с второй роторной об моткой, обличающееся тем, что,, с целью повышения точности, в него введены дифференциальный усилитель, выход которого соединен с управляющим входом преобразователя сигнала тензорезисторного мостового датчика в частоту, а входы соединены sj с первой роторной обмоткой, при этом О) выход кварцевого генератора соединен с выходом усилителя мощности. 00 ч
| Мартяшин А.И., Шахов Э.К | |||
| Преобразователи электрических параметров для систем контроля и измерения | |||
| М.: Энергия, 1976, с | |||
| Автоматический переключатель для пишущих световых вывесок | 1917 |
|
SU262A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
