/////////////////////////А
L Изобретение относится к измерению параметров контролируемого объекта II может быть использовано в высокото ных измерительных системах в машиностроительной и приборостроительной промышлённостях. .Известны системы для измерения электрических сигналов, позволяющие отстроиться от влияния мешающих .факторов за счет автоматической коррекции погрешностей измерительных устройств ll . . Однако при измерении параметров контролируемого объекта параметрическими преобразователями эти устрой ства неэффективны, поскольку входной сигнал является неэлектрической измеряемоР величиной и для выработки корректируьзщего сигнала не могут быть испол1,зованы методы, вспомогательных измерений, методы образцовых сигналов и методы обратного преобразования без применения дополнительных первичных преобразователей. Наиболее близким к предлагаемому является устройство для измерения параметров контролируемого объекта, содержащее цча параметрических преобразователя с однотипными статичес.кими характеристиками, смещенные . друг относительно друга на некоторое расстояние, входы которых подключены к выходу гЕ.нератрра питающих напряжений, а выходы - к входам блока фор мирования корректирующего сигнала. причем выход одного из параметрических преобразователей через усилител с переменным коэффициентом усиления к управляющему входу которого подкл чен выход, блока формирования коррек.тирующего сигнала, соединен с индик тором 2j Однако в данном устройстве коррек ция характеристики, осуществляется путем изменения параметров измерительной цепи, что.йе позволяет отстроиться от таких мешающих факторов как, например, уход час,тоты, амплиту ды или фазы генератода питающих напряжений . Цель изобретения - повышение точ ности измерений. Поставленная цель достигается тем, что в устройстве выход блока формирования корректирующего сигнал подключен к управляющему входу гене ратора питающих напряжений. Предлагаемое устройство позволяет повысить точность измерений, управляя характеристиками преобразователей за счет изменения параметров питающих напряжений, например .амплитуды, частоты или фазы. На чертеже представлена блок-схема устройства. . Устройство содержит генератор 1 питающих напряжений, параметрические преобразователи 2 и 3, блок 4 формирования корректирующего сигнала и индикатор 5..Позицией 6 обозначен контролируемый объект. Выход генератора 1 питающих напряжений соединен с входами параметрических преобразователей (например, вихретоковьми), выходы которых подключены к входам блока 4 формирования корректирующего, сигнала, при этом выход.одного из преобразователей соединен с входом индикатора 5, а выход блока 4 формирования корректирующего -сигнала подключе к управляющему входу генератора 1 питающих напряжений. Устройство работает следующим образом. Параметрические преобразователи запитывают от генератора питающих напряжений. Поскольку преобразователи -смещены друг относительно друга на некоторое расстояние,.то выходные сигналы с них будут отличаться, между собой на некоторую в-еличину, которая зависит от параметров контролируемого объекта 6, окружающей среды и.питающих напряжений. Раз-. . ность выходных сигналов параметри-. ческих преобразователей 2 и 3 сравнивается в блоке 4 формирования корректирующего сигнала с заданной величиной. Если действие мешающих факторов отсутствует, то разность вы-, ходных сигна.пов равна заданной величине и корректирующий сигнал равен нулю. При действии мешаюпщх факторов разность выходных сигналов отличается от заданной величины, что приводит к появлению корректирующего сигнала, который, воздействуя на генератор 4, изменяет параметры питающих напряжений - амплитуду, частоту или фазу до тех пор, пока эта разность снова не будет равна заданной, обеспечивая тем самым постоянство статических характеристик параметрических преобразователей. Контролируемая величи311792304
на - расстояние между одним из пара-ля, что особенно важно в системах,
метрических преобразователей 2 и 3 иработающих в производственных услообъектом - определяется по индикато-виях, и тем самым управлять качеством
ру 5.выпускаемой продукции. При .этом наиПредлагаемое устройство позволяетожидать от использования устройства
повысить точность и надежность контро-в системах активного контроля.
.5больший экономический эффект можно
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактного измерения угла наклона электропроводящей поверхности | 1979 |
|
SU879286A2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082076C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2045000C1 |
| Устройство для измерения удельной электрической проводимости изделий | 1987 |
|
SU1490635A1 |
| Устройство для контроля многослойных диэлектриков | 1983 |
|
SU1095101A1 |
| Вихретоковое устройство для неразрушающего контроля | 1977 |
|
SU696373A1 |
| Устройство для многопараметрового неразрушающего контроля | 1989 |
|
SU1668928A1 |
| Вихретоковый измеритель скорости | 1985 |
|
SU1273809A1 |
| Устройство для измерения полного сопротивления параметрических датчиков | 2018 |
|
RU2705179C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА, содержащее два параметрических преобразователя, входы которых подключены к выходу генератора питающих напряжений, а выходы - к входам блока формирования корректирующего сигнала, причем выход одного из параметрических преобразователей соединен с входом инд:;(Икатора, о тлича.ющеес я тем, что, с целью повышения точности измерений, выход блока формирования корректирукнцего сигнала подключен к управляющему входу генератора питакнцих напряжений.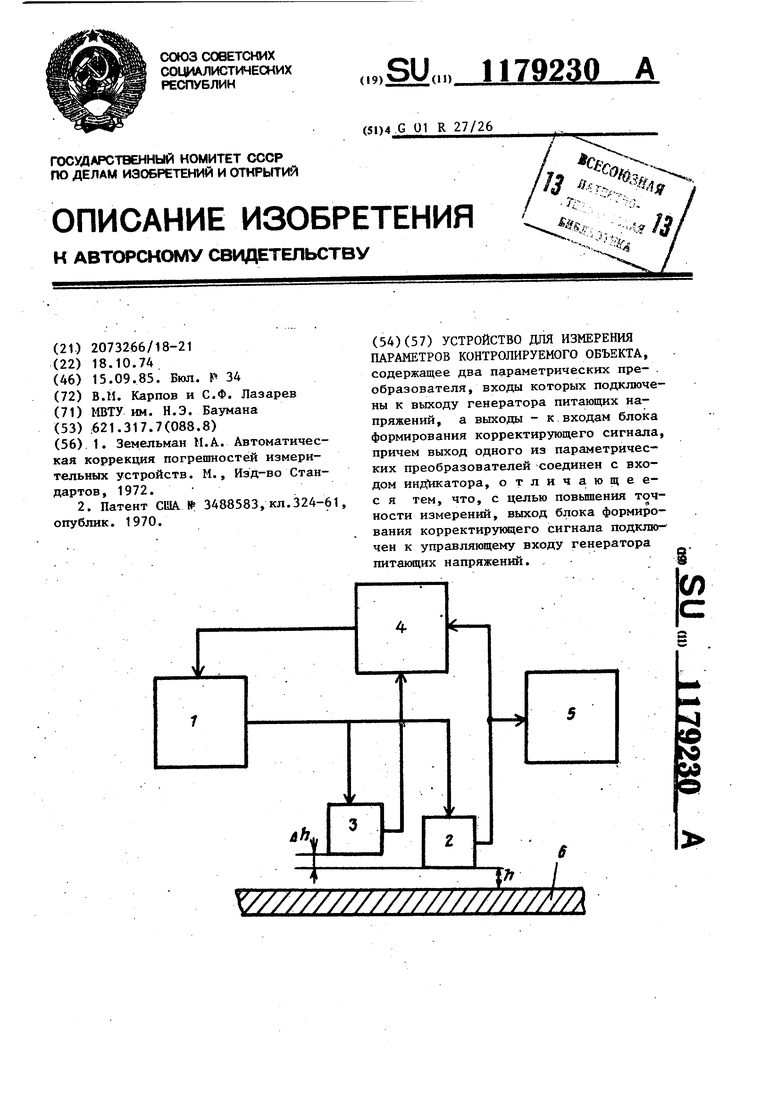
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Земельман М.А | |||
| Автоматическая коррекция погрешностей измерительных устройств | |||
| М., Иэд-во Стандартов, 1972 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3488583, кл.324-61, опублик | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
