Изобретение относится к области измерительной техники, в частности к измерению расстояния в ближней частотной радиолокации промышленного применения, например, в закрытых резервуарах при измерении уровня жидкости путем пересчета измеренного расстояния от измерительного прибора до поверхности жидкости в уровень заполнения.
Для достижения высокой точности измерения в дальномерах с частотной модуляцией стараются обеспечить возможно больший диапазон перестройки частоты ΔF при частотной модуляции (ЧМ) [1, стр. 274]. Обязательным условием высокой точности измерения является линейный закон изменения частоты при ЧМ.
Во многих случаях, например при высоких температурах, во взрывоопасных зонах, радиационном влиянии и ряде других факторов, только отсутствие механического контакта с зондируемым объектом позволяет выполнить операцию измерения расстояния и автоматизировать процесс измерения. Однако в таких неблагоприятных условиях приходится, используя волновод, довольно далеко разносить блок генерации и обработки сигнала от антенны, установленной в зоне контроля. Измерению при этом подлежит расстояние от антенны до зондируемых объектов. Из-за частотной дисперсии электромагнитных волн в волноводе возникает паразитная частотная модуляция (ПЧМ) зондирующих волн даже при линейной ЧМ передатчика. При этом погрешность измерения значительно увеличивается при наличии паразитной амплитудной модуляции (ПАМ) зондирующего сигнала и наличии многих объектов, зондируемых одновременно с контролируемыми объектами. Часто один из объектов является полезным, а остальные считаются помехами, которые вызывают увеличение погрешности измерения расстояния при перемещении полезного объекта мимо мешающего даже в благоприятных условиях отсутствия ПЧМ. Наличие ПЧМ и ПАМ приводят к значительному увеличения такой погрешности.
Для уменьшения погрешности используют различные способы уточнения результатов измерения. В частности, известен радиолокационный способ измерения расстояния, основанный на спектральном анализе СРЧ с последующим уточнением результатов измерений на дополнительном этапе обработки СРЧ, при выполнении которого формируют эталонный сигнал, варьируют его параметры и используют для расчета расстояния, когда параметры спектра эталонного сигнала наиболее близки к параметрам спектра СРЧ [2]. Однако искажения спектра сигнала из-за частотной дисперсии приводят к погрешности измерения всеми известными способами [3, 4, 5].
Снижение влияния паразитной частотной модуляции предложено в итерационном способе формирования зондирующего адаптивного частотно-модулированного сигнала для дальномера с периодической частотной модуляцией [6], являющемся прототипом, цикл которого включает формирование периодического модулирующего напряжения, генерирование и возбуждение зондирующих волн, прием, спустя время распространения, отраженных эховолн, смешивание их с частью мощности зондирующих волн, выделение сигнала разностной частоты, измерение длительности мгновенных периодов сигнала разностной частоты за интервал обработки сигнала, являющегося частью периода модуляции. В последующих циклах измерений формируют корректирующее напряжение для уменьшения разности среднего и мгновенных значений длительности периодов до заданного контрольного уровня.
Если помех нет, то как для получения корректирующего напряжения модуляции, так и для измерения расстояния до зондируемой поверхности используют отраженные от зондируемой поверхности эховолны
При наличии помех приведенный вариант способа не применим.
Поэтому в условиях помех при одновременном зондировании нескольких объектов для формирования зондирующего адаптивного частотно-модулированного сигнала для дальномера с периодической частотной модуляцией одну часть мощности зондирующих волн через измерительный канал излучают в направлении зондируемых объектов и используют эхо волны от зондируемых объектов для измерения расстояния до них, а второй частью мощности зондирующих волн возбуждают опорный канал, выполненный в виде отрезка фидерной линии, и используют отраженный от конца фидерной линии эхосигнал для получения корректирующего напряжения модуляции.
Формирование периодического напряжения модуляции Uмод(t) производится путем генерирования цифровых отсчетов Uмод(tj) в фиксированные моменты времени tj, преобразования их в дискретные аналоговые отсчеты и низкочастотной фильтрации, при этом формирование цифровых отсчетов модулирующего напряжения Uмод,k(tj) на k-м периоде модуляции производится рекурсивно по напряжению Uмод,k-1(tj) на предыдущем (k-1)-м периоде и корректирующему напряжению ΔUk(tj), полученному с учетом неравномерности мгновенных периодов сигнала разностной частоты:

где:  - корректирующее напряжение;
- корректирующее напряжение;
 - постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
- постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
Uм - амплитуда модулирующего напряжения;
Тм - период модуляции;
 - относительное изменение периода сигнала разностной частоты;
- относительное изменение периода сигнала разностной частоты;
ΔТр(ti)=Tpi-Тср - отклонение периода сигнала разностной частоты от среднего значения;
 - средний период сигнала разностной частоты;
- средний период сигнала разностной частоты;
N - количество пересечений нулевого уровня сигналом разностной частоты за интервал обработки,
причем значения η(t) в промежуточных точках tj между моментами пересечения сигналом разностной частоты нулевого уровня ti рассчитываются с помощью формул интерполяции.
Возможно формирование цифровых отсчетов модулирующего напряжения в точках пересечения нулевого уровня сигналом разностной частоты в k-м периоде модуляции Uмод,k(ti) путем перестановки на временной оси аналогичных отсчетов (k-1)-го периода по формулам:


а в промежуточных точках периода модуляции с помощью интерполяции.
Цитированный способ может быть реализован устройством [7], содержащим схему цифровой обработки сигналов, антенно-волноводное устройство, управляемый генератор радиочастотного сигнала, синтезатор частоты с двумя входами и одним выходом, направленный ответвитель с одним входом и двумя выходами, смеситель с двумя входами и одним выходом, последовательно соединенные фильтр, схему предварительной аналоговой обработки, аналого-цифровой преобразователь, схему управления с одним входом и двумя выходами. При этом вход управляемого генератора радиочастотного сигнала соединен с выходом синтезатора частот, входы которого соединены, соответственно, с первым выходом управляемого генератора радиочастотного сигнала и первым выходом схемы цифровой обработки сигналов, а выход управляемого генератора радиочастотного сигнала соединен с последовательно соединенными делителем мощности и направленным ответвителем, первый выход которого соединен с входом антенно-волноводного устройства. Входы смесителя соединены, соответственно, со вторым выходом делителя мощности и со вторым выходом направленного ответвителя, а выход соединен с последовательно соединенными управляемыми фильтрами. Выход второго управляемого фильтра соединен со схемой предварительной аналоговой обработки, выход которой соединен с входом аналого-цифрового преобразователя, а выход аналого-цифрового преобразователя соединен с входом схемы цифровой обработки сигналов. Вход схемы управления соединен со вторым выходом схемы цифровой обработки сигналов, а два ее выхода соединены со вторыми входами соответствующих управляемых фильтров.
В последнем цитируемом способе при зондировании одного или нескольких объектов закон модуляции не меняется. Но при зондировании нескольких объектов, часть из которых может играть роль помех, используется опорный канал, выполненный в виде отрезка фидерной линии, в которой также существует дисперсия, однако степень искажения сигнала паразитной частотной модуляцией в опорном канале не может совпадать с искажениями сигнала паразитной частотной модуляцией в измерительном канале. В результате вновь возникает погрешность, вызываемая как дисперсией в измерительном канале, так и совместным влиянием дисперсии, ПАМ и помехами.
Технический результат изобретения - уменьшение погрешности измерения расстояния как из-за влияния частотной дисперсии в волноводе антенно-волноводного тракта, так и из-за совместного влияния частотной дисперсии, ПАМ и взаимного влияния зондируемых объектов, каждый из которых играет роль помехи при измерении расстояний до других объектов.
Технический результат достигается тем, что в способе измерения расстояния радиодальномером с периодической дискретной частотной модуляцией зондирующих радиоволн, цикл измерения которого включает:
генерирование радиочастотного сигнала с периодической дискретной частотной модуляцией с известными значениями начальной ƒ0 и конечной частот, диапазона частотной модуляции Δƒ, периода модуляции и числа дискретных отсчетов частоты М;
формирование и излучение радиоволн в направлении зондируемых объектов;
выделение части генерируемого радиочастотного сигнала;
прием, спустя время распространения, эховолн и формирование из них отраженного сигнала;
смешивание его с выделенной частью генерируемого радиочастотного сигнала;
выделение низкочастотных составляющих результирующего сигнала и выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о расстояниях до контролируемых объектов;
аналоговую обработку СРЧ;
аналого-цифровое преобразование СРЧ;
вычисление разностной частоты, соответствующей отражению от одного из контролируемых объектов из числа зондируемых;
вычисление расстояния до контролируемого объекта по известным скорости распространения радиоволн и разностной частоте СРЧ;
изменение закона частотной модуляции;
осуществляют следующую дополнительную совокупность действий с соблюдением следующих условий.
В каждом цикле измерений за исключением первого по результату выполненного измерения расстояния R до одного контролируемого объекта, известной длине волновода антенно-волноводного тракта L и критической частоте волновода ƒкр изменяют закон частотной модуляции и используют его в следующем цикле измерения расстояния до этого контролируемого объекта.
При этом измерение расстояния до других контролируемых объектов последовательно выполняют с другими законами модуляции.
В первом цикле измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты ƒ(m) с текущими номерами m, в соответствии с выражением

где  ;
;  ;
;  ;
;  .
.
По измеренному расстоянию определяют величину разности  , где Rн=R/L, и при превышении модуля разности
, где Rн=R/L, и при превышении модуля разности  заранее заданной величины Δ в следующих циклах измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с выражением
заранее заданной величины Δ в следующих циклах измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с выражением

а при уменьшении модуля разности  ниже заранее заданной величины Δ сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с предыдущим выражением.
ниже заранее заданной величины Δ сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с предыдущим выражением.
По дискретным отсчетам частоты ƒ(m) генерируют сигнал с цифровыми отсчетами частоты ƒц(m).
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволяет установить, что заявителем не обнаружены технические решения, характеризующиеся признаками, идентичными всем существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов прототипов способа позволило выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявляемых объектах, изложенных в формуле изобретения. Следовательно, заявляемое техническое решение соответствует требованию "новизна" по действующему законодательству. Сведений об известности отличительных признаков в совокупностях признаков известных технических решений с достижением такого же, как у заявляемых способа и устройства, положительного эффекта не имеется. На основании этого сделан вывод о том, что предлагаемое техническое решение соответствует критерию "изобретательский уровень".
Сопоставление признаков известного и предлагаемого способов для анализа изобретательского уровня показывает существенное отличие условий, режимов осуществления действий над электрическими сигналами (как континуальными, так и в виде цифровых отсчетов), которые характеризуются амплитудой, частотой и фазой.
Кроме того, условия и режимы осуществления совокупности действий взаимосвязаны с размерами антенно-волноводного устройства радиодальномера и измеряемым расстоянием.
Эти отличия приводят к появлению качественно новых свойств заявленного способа - возможности точного измерения расстояний до контролируемых объектов при искажении сигналов ПЧМ, вызванной дисперсией, и ПАМ.
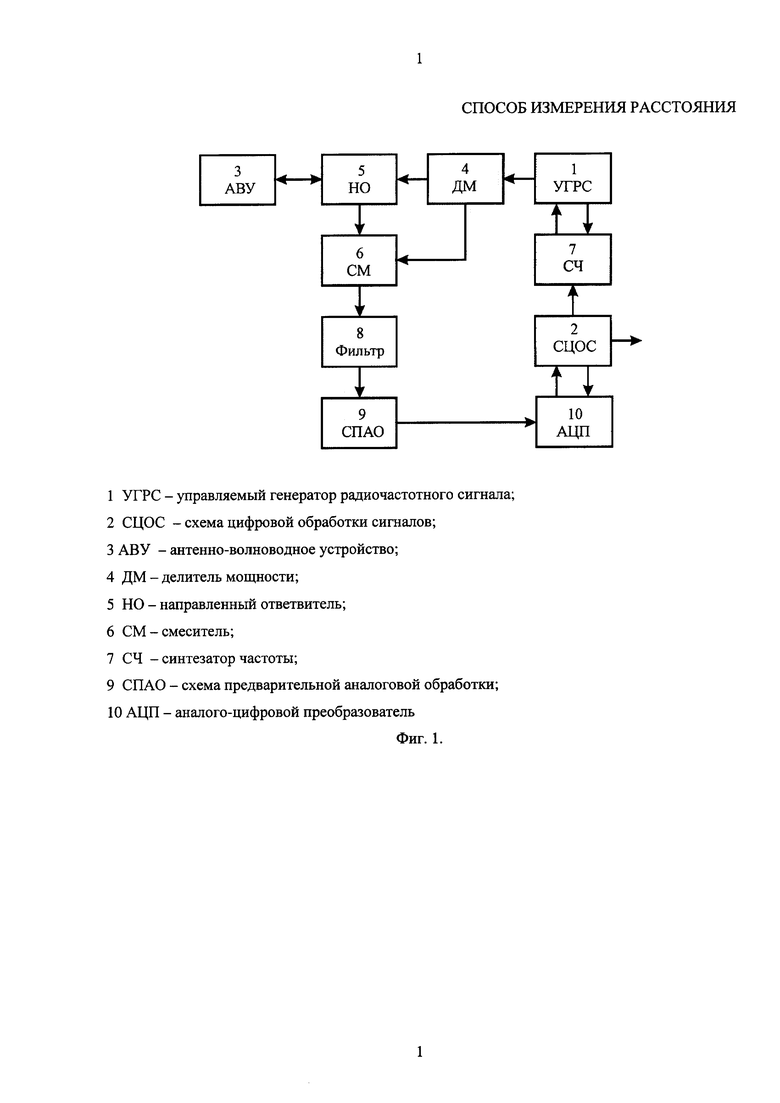
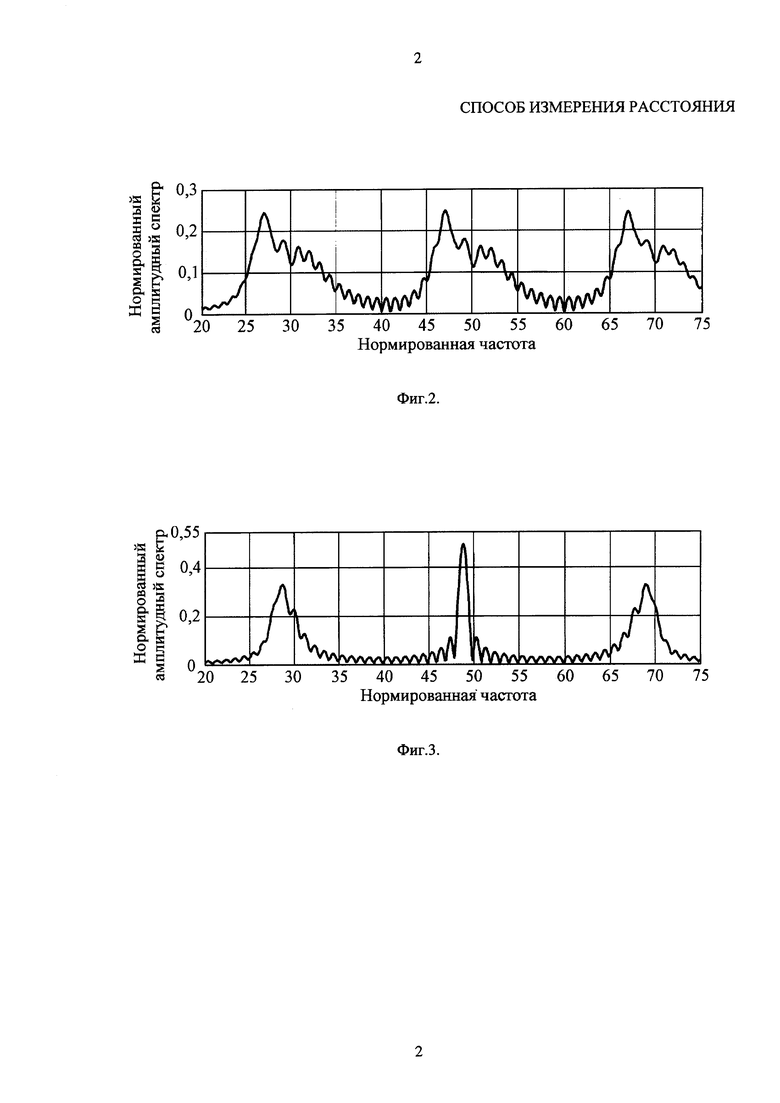
Сущность предлагаемого способа поясняется с помощью структурной схемы одного из возможных радиодальномеров, схематично изображенной на фиг. 1, спектрами, изображенными на фиг. 2, фиг. 3, графиками, изображенными на фиг. 4.
На фиг. 2 изображен спектр трехчастотного сигнала при наличии волновода и линейном законе частотной модуляции.
На фиг. 3 изображен спектр такого же трехчастотного сигнала при наличии волновода, измерении расстояния до объекта со средней разностной частотой и законе частотной модуляции ƒ(m) во втором цикле измерений.
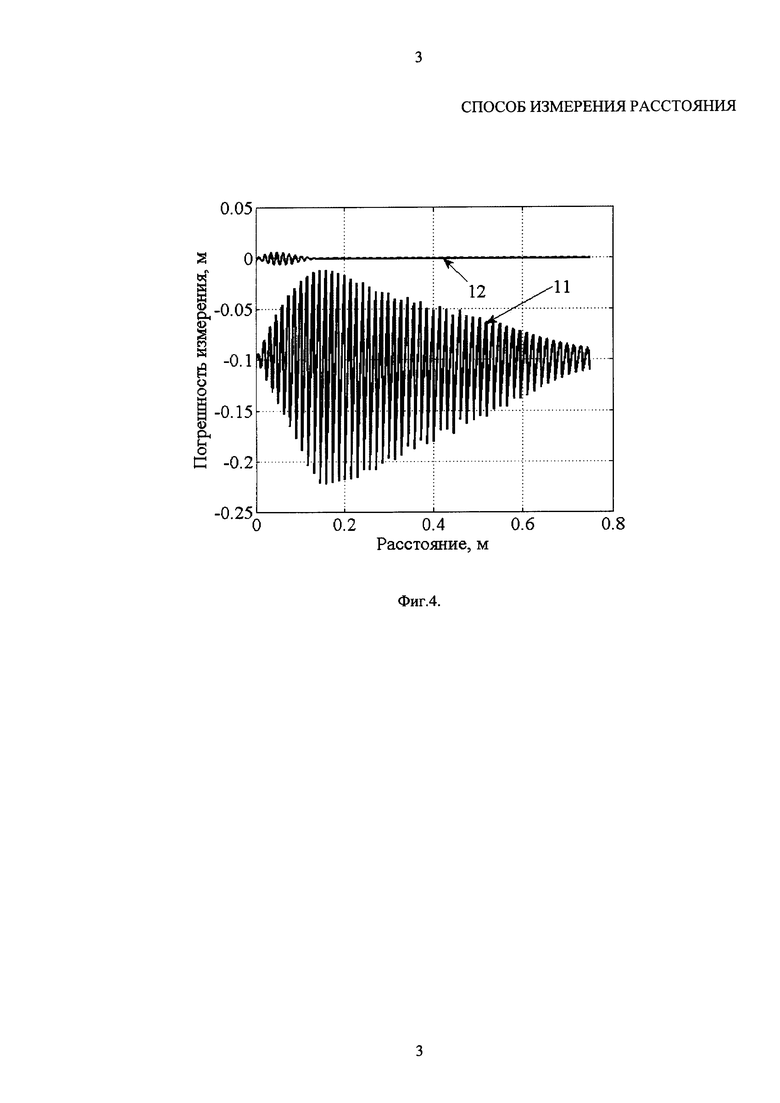
На фиг. 4 изображена погрешность измерения расстояния до одного контролируемого объекта при наличии волновода и мешающего отражения от антенны.
Радиодальномер с частотной модуляцией зондирующих радиоволн (фиг. 1) содержит: управляемый генератор радиочастотного сигнала (УГРС) 1 с одним входом и двумя выходами; схему цифровой обработки сигналов (СЦОС) 2 с тремя выходами и одним входом; антенно-волноводное устройство (АВУ) 3; делитель мощности (ДМ) 4 с одним входом и двумя выходами; направленный ответвитель (НО) 5 с одним входом и двумя выходами; смеситель 6 с двумя входами и одним выходом; синтезатор частоты (СЧ) 7 с одним выходом и двумя входами; фильтр 8; схему предварительной аналоговой обработки (СПАО) 9; аналого-цифровой преобразователь (АЦП) 10 с двумя входами и одним выходом.
Выход СЧ 7 соединен с входом УГРС 1. Входы СЧ 7 соединены, соответственно, с первым выходом УГРС 1 и с первым выходом СЦОС 2. Выход УГРС 1 соединен с последовательно соединенными ДМ 4 и НО 5, а первый выход НО 5 соединен с АВУ 3. Вторые выходы ДМ 4 и НО 5 соединены, соответственно, с первым и вторым входами смесителя 6, выход которого соединен с входом фильтра 8. Выход фильтра 8 соединен с последовательно соединенными СПАО 9 и АЦП 10, а выход АЦП 10 и его второй вход соединены, соответственно, с первым входом и вторым выходом СЦОС 2. Третий выход СЦОС 2 является информационным выходом радиодальномера.
Антенна АВУ 3 может быть выполнена, например, в виде осесимметричного конического рупора.
Фильтр 8 может быть выполнен в виде широко известных [8, стр. 93-129] фильтра верхних частот или полосового фильтра.
Практическая реализация устройства не представляет собой сложности и осуществляется на основе широко распространенных электронных элементов, например, производимых фирмами «ANALOG DEVICES», «MOTOROLA», «MICRONETICS», «PERE-GRINE» и др.
С помощью радиодальномера с частотной модуляцией зондирующих радиоволн способ измерения расстояния осуществляют следующим образом.
Часть генерируемого радиочастотного сигнала с периодической частотной модуляцией в виде последовательности радиочастотных сигналов с известными значениями начальной ƒ0 и конечной частот, диапазона частотной модуляции Δƒ, периода модуляции и числа дискретных отсчетов частоты М, от УГРС 1 (фиг. 1), управляемого СЧ 7, через ДМ 4 и НО 5 поступает в антенну АВУ 3, которая формирует направленное излучение в направлении зондируемых объектов. После отражения от зондируемых объектов эховолны принимаются антенной АВУ 3 и преобразуются в отраженный сигнал, который через НО 5 поступает на второй вход смесителя 6. В качестве гетеродинного используют выделенную ДМ 4 часть генерируемого сигнала, которая поступает на первый вход смесителя 6. Выходной сигнал смесителя 6 фильтруется фильтром 8 и с первого выхода поступает на вход СПАО 9, где обрабатывается путем заданного усиления и дополнительного подавления высокочастотных составляющих. В результате выделяются низкочастотные составляющие результирующего сигнала, из которых выделяется информационная составляющая СРЧ uи(t,τR), содержащая информацию о расстояниях до контролируемых объектов. Информационную составляющую СРЧ uи(t,τR) используют для расчета расстояния. При этом в ней могут присутствовать также составляющие, созданные отражениями от контролируемых и мешающих объектов, которые приводят к погрешности измерения.
Выделенная информационная составляющая СРЧ uи(t,τR) через АЦП 10 поступает на первый вход СЦОС 2. С применением СЦОС 2 выполняют все действия над составляющими СРЧ, управляют синтезатором СЧ 7 заданием кодов дискретных частот и синхронизируют работу АЦП 10.
По цифровым отсчетам uци(m,τR), (где m=0, …, М - 1; М - число отсчетов) информационной составляющей СРЧ uи(t,τR) с помощью СЦОС 2 вычисляют спектр Sи(τR). Этот спектр искажен паразитной частотной модуляцией из-за частотной дисперсии в волноводе и его форма зависит от длины волновода антенно-волноводного тракта, паразитной амплитудной модуляции и наличия помех. Затем вычисляют центральную частоту спектра, например, по частоте его максимума, вычисляют и записывают в память СЦОС 2 расстояние R по известным скорости распространения радиоволн и вычисленной центральной частоте спектра.
Используя записанные в памяти СЦОС 2 вычисленное расстояние R и априорные сведения о длине волновода антенно-волноводного тракта L, критической частоте волновода ƒкр, начальной частоте ƒ0 и диапазоне частотной модуляции Δƒ, по одному из приведенных выражений для ƒ(m), в зависимости от отношения вычисленного расстояния R к длине волновода антенно-волноводного тракта L, вычисляют необходимый закон частотной модуляции ƒ(m) и его цифровые отсчеты ƒц(m). Кодами, соответствующими цифровым отсчетам частот ƒц(m), с одного из выходов СЦОС 2 управляют синтезатором частоты СЧ 7, с помощью которого устанавливается частота генерации УГРС 1, близкая к ƒ(m).
Выбор контролируемого объекта осуществляют с использованием известного способа измерения дальности до нескольких целей [9] стр. 236, реализуемого на основе цифрового анализа спектра [9] стр. 240, который в данном случае выполняют, например, путем последовательной обработки части отсчетов дискретного спектра СРЧ (обработка в спектральном окне), начиная с первого отсчета. Количество обрабатываемых отсчетов соответствует величине элемента разрешения используемого сигнала с частотной модуляцией (например, 3 отсчета). Затем выполняют последовательное дискретное перемещение обрабатываемого участка спектра на величину одного элемента разрешения. Обработку выбранной части отсчетов дискретного спектра осуществляют при условии превышения максимальным отсчетом в этой части спектра заранее заданного порогового уровня. При этом спектральное окно устанавливают симметрично относительно обнаруженного максимального отсчета.
После измерения в соответствии с заявленным способом расстояния до первого выбранного объекта продолжают дальнейшее последовательное перемещение части выбранных отсчетов (спектрального окна) до тех пор, пока не будет обработан весь спектр СРЧ и не будут измерены расстояния до всех контролируемых объектов.
Искажение спектра СРЧ S(x) иллюстрируется фиг. 2, где показан нормированный амплитудный спектр трехчастотного СРЧ, вычисленный с помощью дискретного преобразования Фурье [1]. При расчетах использованы: нормированная длина волновода xL=2ΔƒL/с равная 20 (здесь с - скорость света); нормированные расстояния до трех контролируемых объектов xR=2ΔƒR/c, равные соответственно 0, 20 и 40; диаметр круглого волновода 25 мм; ƒ0=8,5 ГГц и использован диапазон модуляции Δf=3 ГГц; х=FT - нормированная текущая частота F - циклическая частота СРЧ, Т - длительность интервала времени, соответствующего монотонному изменению частоты при частотной модуляции. Спектр нормирован к амплитудному значению спектра, не искаженному дисперсией. С учетом частотной дисперсии в волноводе антенно-волноводного тракта нормированные частоты максимумов спектра, соответствующие слагаемым СРЧ от трех контролируемых объектов, составляют около 27 бин, 47 бин и 67 бин.
На фиг. 3 показано, что в результате осуществления способа измерения расстояния для одного из контролируемых объектов, например, объекта, создающего слагаемое СРЧ с частотой около 47 бин, закон частотной модуляции ƒ(m) с помощью СЦОС 2 и СЧ 7 устанавливают таким, что в этом слагаемом СРЧ исчезает ПЧМ, при этом в слагаемых СРЧ с другими частотами (в приводимом примере с частотами 27 бин и 67 бин) ПЧМ подавлена не полностью и спектр становится неискаженным только для контролируемого объекта, создающего слагаемое СРЧ с частотой 47 бин. В результате можно точно определить расстояние до этого контролируемого объекта. После измерения расстояния до одного контролируемого объекта последовательно выполняют измерения до других контролируемых объектов с другими законами модуляции и с аналогичными совокупностями действий.
Влияние помехового отражения от антенны на величину погрешности измерения расстояния по спектру сигнала с ПЧМ, полученное с помощью моделирования процесса измерения, показано на фиг. 4 (кривая 11). Сигнал u(m) с амплитудой U формировался на основе выражения

при изменении расстояния от 0 до 1,5 м. Отношение помеха-сигнал q=0,2. Длина волновода 5 м. При расчете спектра использовалась весовая функция Блэкмана [10, 11]. С учетом постоянного смещения максимальное значение погрешности составляет около 0,25 м.
На той же фигуре приведена погрешность измерения при том же q, но при осуществлении заявленного способа измерения расстояния (кривая 12). В этом случае максимальное значение погрешности составляет около 0,0062 м. В приведенном примере общее уменьшение погрешности составляет 40 раз, а осциллирующая составляющая погрешности уменьшается в 18 раз.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Атаянц Б.А., Давыдочкин В.М., Езерский В.В., Паршин B.C., Смольский С.М. Прецизионные системы ближней частотной радиолокации промышленного применения. М.: Радиотехника. 2012. 512 с.
2. Давыдочкин В.М., Паршин B.C. Измерение расстояния уровнемером с частотной модуляцией излучаемого сигнала при наличии мешающих отражений малой интенсивности. // Труды Российского НТО РЭС им. Попова Серия: Цифровая обработка сигналов и ее применение. 8-я Международная конференция Вып. VIII - 2. Москва. 2006. С. 530-533.
3. Патент США №5546088 13.08.1996.
4. Патент США №6107957 22.08.2000.
5. Патент США №5504490 A, G01S 13/08, от 02.04. 1996.
6. Патент РФ №2234716. Способ формирования зондирующего частотно-модулированного сигнала для дальномера с периодической частотной модуляцией / Атаянц Б.А., Езерский В.В, Баранов И.В., Болонин В.А., Давыдочкин В.М., Кагаленко Б.В. Опубл. 20.08.2004.
7. Патент РФ №2234688. Способ измерения расстояния до зондируемого материала, его электрофизических параметров (варианты), устройство для его осуществления и способ калибровки /. Атаянц Б.А., Езерский В.В, Баранов И.В., Болонин В.А., Давыдочкин В.М., Кагаленко Б.В., Пронин В.А. Опубл 20.08.2004.
8. А.Дж. Пейтон, В.Волш. Аналоговая электроника на операционных усилителях. (Пер. с англ.): М.: БИНОМ, 1994. 352 с.
9. Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника. 2004. 320 с.
10. Давыдочкина С.В. Весовые функции для адаптивного гармонического анализа финитных колебательных процессов // Сборник научных трудов профессорско-преподавательского состава Рязанского государственного агротехнологического университета им. П.А. Костычева. Рязань, 2008. С. 78-81.
11. Дворкович В.П., Дворкович А.В. Оконные функции для гармонического анализа сигналов М.: Техносфера, 2014. - 112 с.
Изобретение относится к области измерительной техники, в частности к измерению расстояния в ближней частотной радиолокации промышленного применения, например, в уровнемерах. Достигаемый технический результат изобретения - уменьшение погрешности измерения расстояния, вызванной частотной дисперсией в антенно-волноводном тракте (АВТ). Указанный результат достигается за счет того, что для измерения используют линейную связь средней частоты разностного сигнала с измеряемым расстоянием. Уменьшение погрешности измерения расстояния обеспечивается уменьшением искажения сигнала разностной частоты (СРЧ) паразитной частотной модуляцией (ЧМ), которая вызывается частотной дисперсией в волноводе АВТ. Уменьшение искажений выполняется заданием необходимого закона ЧМ. Необходимый закон ЧМ зависит от длины волновода АВТ и от расстояния между антенной и контролируемым объектом, поэтому процесс его определения итерационный, но быстро сходящийся. 4 з.п. ф-лы, 4 ил.
1. Способ измерения расстояния радиодальномером с периодической дискретной частотной модуляцией зондирующих радиоволн, цикл измерения которого включает: генерирование радиочастотного сигнала с периодической дискретной частотной модуляцией с известными значениями начальной ƒ0 и конечной частот, диапазона частотной модуляции Δƒ, периода модуляции и числа дискретных отсчетов частоты М; формирование и излучение радиоволн в направлении контролируемых объектов; выделение части генерируемого радиочастотного сигнала; прием, спустя время распространения, эховолн и формирование из них отраженного сигнала; смешивание его с выделенной частью генерируемого радиочастотного сигнала; выделение низкочастотных составляющих результирующего сигнала и выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о расстояниях до контролируемых объектов, аналоговую обработку СРЧ, аналого-цифровое преобразование СРЧ, вычисление разностной частоты, соответствующей отражению от одного из контролируемых объектов, вычисление расстояния по известным скорости распространения радиоволн и разностной частоте СРЧ, изменение закона частотной модуляции, отличающийся тем, что в каждом цикле измерений за исключением первого по результату выполненного измерения расстояния R до одного контролируемого объекта, известной длине волновода антенно-волноводного тракта L и критической частоте волновода ƒкр изменяют закон частотной модуляции и используют его в следующем цикле измерения расстояния до этого контролируемого объекта.
2. Способ по п. 1, отличающийся тем, что в первом цикле измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты ƒ(m) с текущими номерами m, в соответствии с выражением
 ,
,
где a=Δƒ/ƒ0; b=ƒкр/ƒ0;  ;
;  ,
,
и при превышении модулем разности  , где Rн=R/L, заранее заданной величины Δ в следующих циклах измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с выражением
, где Rн=R/L, заранее заданной величины Δ в следующих циклах измерений сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с выражением
 ,
,
а при уменьшении модуля разности  ниже заранее заданной величины Δ сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с предыдущим выражением.
ниже заранее заданной величины Δ сигнал генерируют с законом частотной модуляции, определенным дискретными отсчетами частоты в соответствии с предыдущим выражением.
3. Способ по п. 1, отличающийся тем, что по дискретным отсчетам частоты ƒ(m) генерируют сигнал с цифровыми отсчетами частоты ƒц (m).
4. Способ по п. 1, отличающийся тем, что выбор одного из контролируемых объектов выполняют путем обработки части отсчетов дискретного спектра СРЧ вокруг ожидаемого положения объекта, соответствующих величине одного элемента разрешения используемого сигнала с частотной модуляцией, и последовательного дискретного перемещения обрабатываемого участка спектра на величину одного элемента разрешения, начиная с первого отсчета.
5. Способ по п. 1, отличающийся тем, что обработку выбранной части отсчетов дискретного спектра осуществляют при превышении максимальным отсчетом в этой части заранее заданного порогового уровня.
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОФИЗИЧЕСКИХ ПАРАМЕТРОВ ЗОНДИРУЕМОГО МАТЕРИАЛА И РАССТОЯНИЯ ДО НЕГО (ВАРИАНТЫ), УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ КАЛИБРОВКИ ЭТОГО УСТРОЙСТВА | 2003 |
|
RU2234688C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН (ВАРИАНТЫ) | 2010 |
|
RU2423723C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ЧМ-ДАЛЬНОМЕРА МАСШТАБИРОВАНИЕМ ФАЗЫ СИГНАЛА БИЕНИЙ | 2010 |
|
RU2426070C1 |
| JP 10123238 A, 15.05.1998 | |||
| US 6492038 B1, 10.12.2002 | |||
| US 20070057838 A1, 15.03.2007 | |||
| KR 1552546 B1, 11.09.2015. | |||

