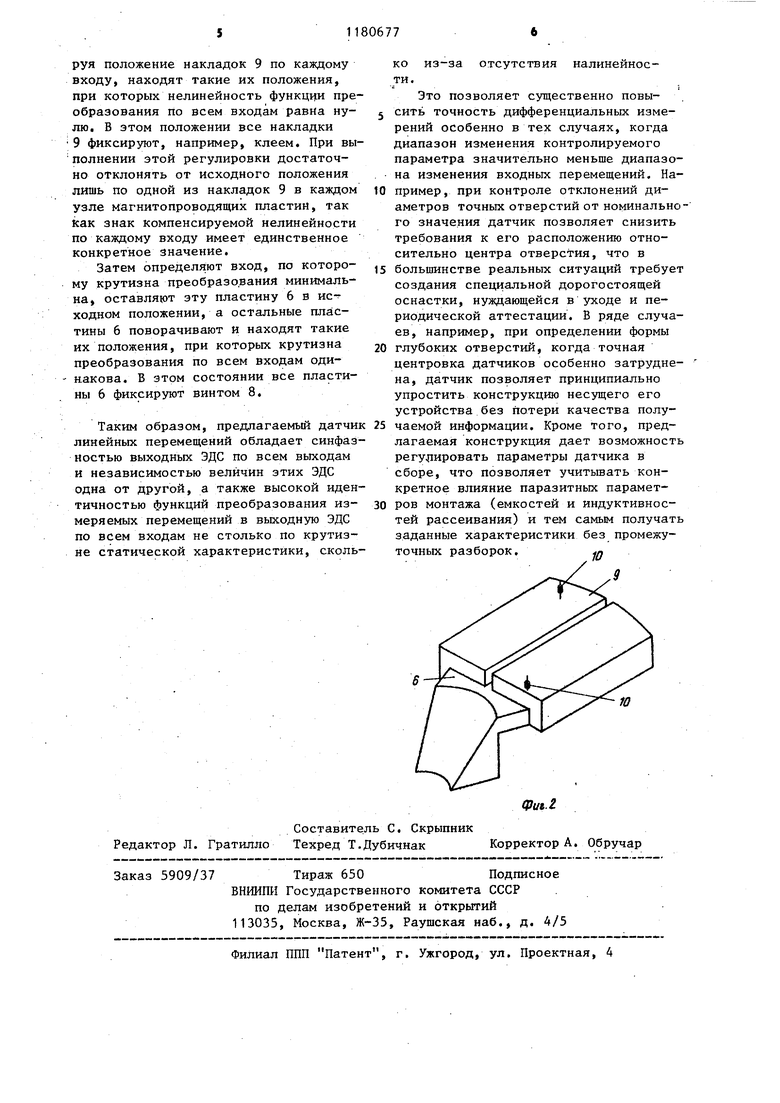
Изобретение относится к измерительной технике, может быть использовано для контроля размеров издели преимущественно геометрических пара метров отверстий, и является усовер шенствованием изобретения по основному авт.св. № 929995. Цель изобретения - повышение точ ности измерения путем обеспечения идентичности характеристик преобразования по разным входам датчика. На фиг, 1 показано упрощенное ко структивное выполнение датчика; на фиг.2 - конструкция одного из ре гулировочных узлов, содержащего маг нитопроводящую пластину и Г-образны накладки. Датчик линейных перемещений содержит магнитопровод 1, выполненньш в виде пустотелого барабана с центральным стержнем 2, закрепленным на его нижнем основании 3. Верхнее основание 4 барабана выполнено с отBepcTHeMj через которое проходит с зазором верхний незакрепленный коне центрального стержня 2. Этот конец центрального стержня а также боковая цилиндрическая поверхность 5 барабана выступают над его верхним основанием 4. На выступающем конце центрального стержня 2 закреплены магнитопроводящие пластины 6, у которых продольные боковые грани параллельны одна другой. Пластины 6 установлены радиально с возможность перемещения-поворота вокруг оси 00 барабана в плоскости, параллельной плоскости его верхнего основания 4. Для этого каладая магнитопроводящая пластина 6 имеет секторньш участок, цилиндрическая поверхность которого входит в цилиндрическую расточку верхнего конца центрального стержня 2. Коническая поверхность секторного участка контактирует сконусообразным элементом 7, в котором имеется отверстие под фиксирующий винт 8. На пластинах 6 размещены с возможностью перемещения-поворота вокруг фиксированных осей магнитопроводящие накладки 9, имеющие поперечное сечение Г-образной формы (фиг.2). Короткие площадки накладок 9 в исходном положении прижаты к боковым поверхностям магнитопроводящих пластин 6 и не выступают за их нижнюю поверхность. Поэтому в плане наружные продольные боковые грани накладок 9 в исходном положении- параллельны одна другой. Штифты 10, вокруг которых могут поворачиваться накладки 9, расположены вблизи от боковых продольных граней пластин 6: один - у свободного, а другой - около закрепленного секторного конца пластины 6. Нижние поверхности магнитопроводящих пластин 6 и накладок 9 образуют с верхней поверхностью основания 4 магнитопровода рабочие воздушные зазоры. Обмотка 11 возбуждения датчика размещена в полости барабана магнитопровода 1 и охватывает центральный стержень 2. В каждом рабочем зазоре помещена охватывающая соответствующие магнитопроводящие пластины 6 и накладки 9 вторичная обмотка 12, установленная с возможностью перемещения относительно пластин и связываемая в процессе измерения с контролируемым объектом. В исходном положении продольные оси симметрии всех пластин 6 параллельны направлениям движения соответствующих вторичных обмоток 12. Датчик линейных.перемещений работает следующим образом. При подключении обмотки 11 возбуждения к источнику переменного напряжения по ней протекаетток, магнитньш поток которого проходит по центральному стержню 2, нижнему основацию 3, боковой поверхности 5 барабана магнитопровода 1, его верхнему основанию 4 и замыкается через воздушные зазоры на пластины 6 и накладки 9. Когда отсутств-уют разброс свойств материала деталей магнитопровода, погрешности их изготовления и сборки магнитопровода в целом, индукция в рабочих зазорах постоянна и градиент потока вдоль продольной оси симметрии узлов магнитопроводящих, пластин 6 и накладок 9 также постоянен и одинаков по величине. В результате величина магнитного потока, пронизывающего вторичные обмотки 12, определяется их удалением от оси 00 барабана. Чем больше это расстояние, тем меньше величина магнитного потока. Благодаря постоянству градиента потока в магнитопроводящих пластинах ЭДС на выходах всех вторичных обмоток 12 линейно связана с их перемещением и при указанных условиях функция преобразования перемещения в выходную ЭДС по всем входам датчика одинакова EolfiH i o где х - измеряемое перемещение по i-му входу; (х;)- функция преобразования для случая идеального датчика при исходном положении пластин 6 и накладок 9; be,C(j- постоянные коэффициенты, одинаковые для всех входов Выходные.ЭДС всех вторичных обмо ток 12 не зависят одна от другой, так как изменение положения любой из них не изменяет магнитного потока в пластинах 6 и накладках 9. Фаз выходных ЭДС всех вторичных обмоток не зависят от измеряемых перемещени и совпадают одна с другой. Свойства независимости ЭДС друг от друга и постоянства фазы сохраняются в рассматриваемом датчике и в реальны условиях. При отклонении пластин 6 от исхо ного положения изменяется проекция измеряемого перемещения на продольную ось соответствующих пластин 6 и накладок 9, но вид функции преобр зования по всем входам не изменяется E,-i(«i b cosecoi;X - C fe.x,C., , ) функция преобразовани по i-му входу при исходном положении толь ко накладок 9; oi- - угол между направлением движения вторичной обмотки и осью симметрии пластины 6 на i-oM входе} с. - постоянный коэффициен для i-ro входа. Коэффициенты Ъд и Ь, в формулах (1) и (2) имеют размерность крутизны преобразования измеряемого перемещения X; В выходную ЭДС, а выражение (2) показывает, что с помощью поворота пластин 6 можно изменять крутизну преобразования независимо по любому входу. Если пластины 6 находятся в исходном положении, а накладки 9 повернуты вокруг штифтов 10 на неболь шие угль1; то конфигурация рабочего зазора в плане становится трапециевидной и градиент потока изменяется линейно по направлению оси симметри 74 пластин 6, что изменяет вид функции преобразования i2(,j, ,(х1)- функция преобразования по i-му входу при исходном положении пластин 6 и повернутых накладках 9; U i2iS2 постоянные коэффициенты функции преобразования для i-ro входа. Значение коэффициента а,, который определяет степень нелинейности функции преобразования, зависит от величины угла отклонения накладки 9 от ее исходного положения, а знак этого коэффициента - от того, какая из этих двух пластин в данном узле магнитопроводящих пластин отклонена больше. Если конфигурация рабочего зазора в плане: такова, что большее основание трапеции расположено у закрепленного конца пластины 6, то - большее основание трапеции находится у свободного конца этой пластины, то a.. Таким образом, отклонением накладок 9 можно управлять нелинейностью функции преобразования предлагаемого датчика независимо по каждому входу. В реальном датчике воздействие источников непостоянства градиента потока по каждому входу является случайной многомерной функцией, В результате по каждому входу при исходном положении пластин 6 и Г-образных накладок 9 функции преобразования имеют вид (3), причем коэффициенты Ъ и с в правой части отличаются от значений Ь и выражении (1) на случайную величину первого порядка малости, а коэффициент с. может иметь любой знак. Регулировкой положения пластин 6 и накладок 9 можно получить одинаковые функции преобразования в виде линейной функции по всем входам датчика. Регулировка датчика выполняется следующим образом, Устанавливают пластины 6 и накладки 9 по всем входам в исходное нулевое положение и снимают зависимости выходных ЭДС от перемещения. При обработке- результатов измерений одним из методов, например методом наименьших квадратов, находят значения коэффициентов я , Ъ и е аппроксимирующего полинома второй степени. Регуля

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1980 |
|
SU929995A1 |
| Преобразователь перемещений | 1977 |
|
SU767502A1 |
| Датчик перемещений | 1984 |
|
SU1195179A1 |
| БЕСКОЛЛЕКТОРНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ПОСТОЯННЫМИ МАГНИТАМИ | 2014 |
|
RU2565775C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ ПЕРЕМЕННОЙ ЭДС ПРИ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ | 2013 |
|
RU2570897C2 |
| Датчик образцовых сигналов для поверки трансформаторных преобразователей перемещения | 1979 |
|
SU879273A1 |
| Универсальный бесконтактный измерительный преобразователь тока | 1990 |
|
SU1739307A1 |
| Преобразователь линейного пере-МЕщЕНия B фАзу элЕКТРичЕСКОгО Сиг-НАлА | 1979 |
|
SU800644A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU708385A1 |
| Датчик угловых перемещений | 1989 |
|
SU1768950A1 |
ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ по авт.св. № 929995, отличающийся тем, что, с целью повышения точности измерения путем обеспечения идентичности характеристик преобразования по разным входам датчика, он снабжен магнитопроводящими накладками Г-образного поперечного сечения, размещенньЙ4И на магнитопроводящих пластинах с возможностью перемещения относительно их поверхности. в
| Датчик линейных перемещений | 1980 |
|
SU929995A1 |
