on
С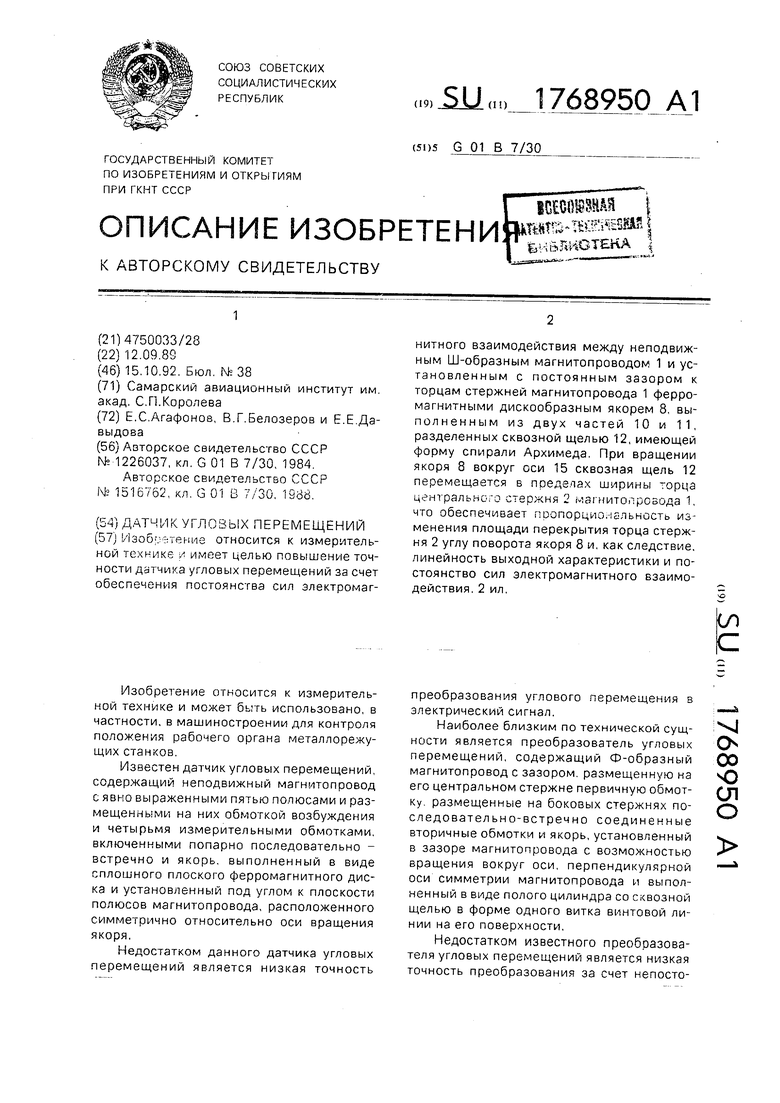

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1989 |
|
SU1768948A1 |
| Датчик угловых перемещений | 1991 |
|
SU1779909A1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1677505A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| Преобразователь угловых перемещений | 1983 |
|
SU1146545A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1610247A1 |
| Устройство для измерения давления | 1985 |
|
SU1328698A1 |
| Индуктивно-трансформаторный датчик перемещений | 1988 |
|
SU1516747A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1967 |
|
SU224653A1 |
Изоб. -тение относится к измерительной технике / имеет целью повышение точности датчика угловых перемещений за счет обеспечения постоянства сил электромагнитного взаимодействия между неподвижным Ш-образным магнитопроводом 1 и установленным с постоянным зазором к торцам стержней магнитопровода 1 ферромагнитными дискообразным якорем 8. выполненным из двух частей 10 и 11, разделенных сквозной щелью 12, имеющей форму спирали Архимеда. При вращении якоря 8 вокруг оси 15 сквозная щель 12 перемещается в предепах ширины торца центрального стержня 2 iviai нитолрсвода 1, что обеспечивает гшопорциз.альность изменения площади перекрытия торца стержня 2 углу поворота якоря 8 и. как следствие, линейность выходной характеристики и постоянство сил электромагнитного взаимодействия. 2 ил.
Изобретение относится к измерительной технике и может быть использовано, в частности, в машиностроении для контроля положения рабочего органа металлорежущих станков.
Известен датчик угловых перемещений, содержащий неподвижный магнитопровод с явно выраженными пятью полюсами и размещенными на них обмоткой возбуждения и четырьмя измерительными обмотками, включенными попарно последовательно - встречно и якорь, выполненный в виде сплошного плоского ферромагнитного диска и установленный под углом к плоскости полюсов магнитопровода, расположенного симметрично относительно оси вращения якоря,
Недостатком данного датчика угловых перемещений является низкая точность
преобразования углового перемещения в электрический сигнал,
Наиболее близким по технической сущности является преобразователь угловых перемещений, содержащий Ф-образный магнитопровод с зазором размещенную на его центральном стержне первичную обмотку размещенные на боковых стержнях последовательно-встречно соединенные вторичные обмотки и якорь, установленный в зазоре магнитопровода с возможностью вращения вокруг оси, перпендикулярной оси симметрии магнитопровода и выполненный в виде полого цилиндра со сквозной щелью в форме одного витка винтовой линии на его поверхности.
Недостатком известного преобразователя угловых перемещений является низкая точность преобразования за счет непостоVJ
о
00
Ю
ел о
янства сил электромагнитного взаимодействия между якорем и Ф-образным магни- топроводом.
Цель изобретения - повышение точности датчика.
Поставленная цель достигается тем, что в известном датчике угловых перемещений, содержащем трехстержневой магнитопро- вод, размещенную на его центральном стержнем первичную обмотку, расположенные на его боковых стержнях вторичные обмотки, соединенные встречно-последовательно и установленный с возможностью вращения якорь, имеющий сквозную щель, а центральный стержень магнитопровода размещен напротив щели, якорь выполнен в виде диска и расположен так, что ось его вращения параллельна оси центрального стержня магнитопровода, который выполнен Ш-образным, торцы его стержней параллельны плоскости якоря, а щель в якоре заполнена диамагнитным веществом и имеет форму спирали Архимеда, радиус р которой выбран из условия
,
где PQ - начальный радиус спирали;
а - ширина торца центрального стержня магнитопровода;
(р-угловая текущая координата спирали.
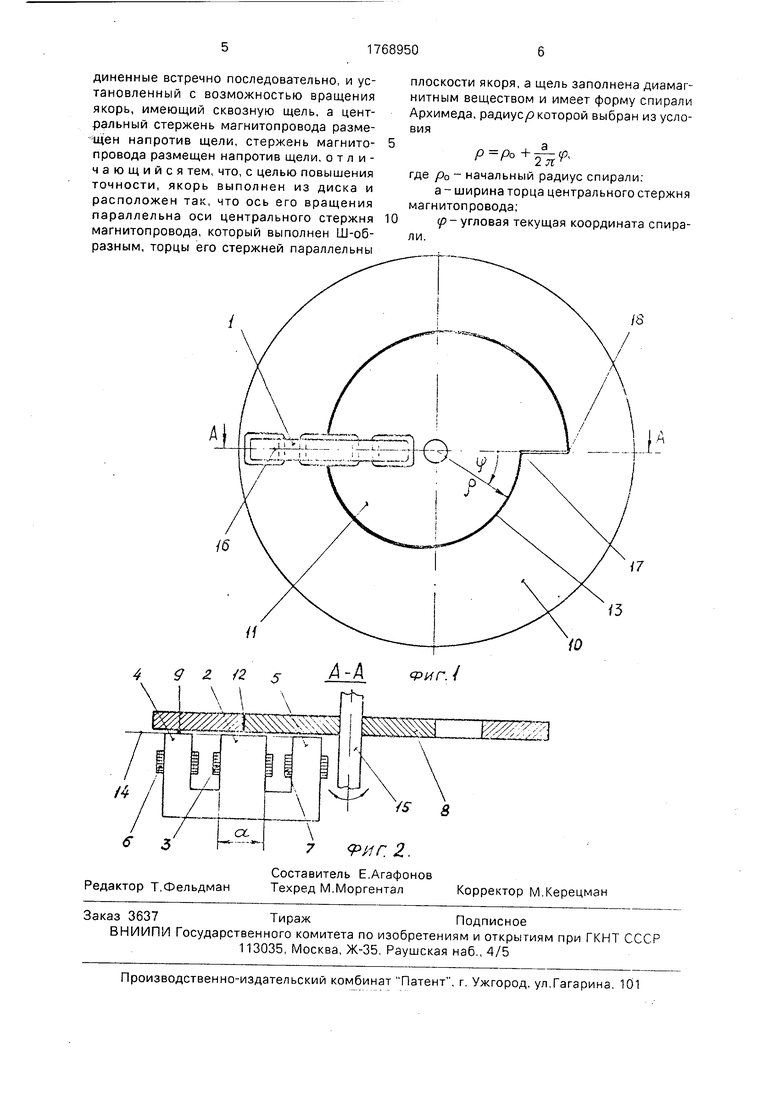
На фиг. 1 представлен общий вид датчика угловых перемещений; на фиг.2 - поперечный разрез датчика.
Датчик угловых перемещений содержит неподвижный Ш-образный магнитопровод 1, включающий центральный 2 стержень, на котором размещена первичная 3 обмотка и боковые 4 и 5 стержни, на которых размещены вторичные б и 7 обмотки, соответственно. Первичная 3 обмотка подключена к источнику питания переменного тока (не показан), а вторичные 6 и 7 обмотки соединены встречно-последовательно и подключены к измерительной схеме (не показана). Якорь датчика выполнен в виде ферромагнитного диска 8, ось вращения которого параллельна оси центрального стержня 1 магнитопровода 1, закрепленного по отношению к диску 8 якоря с постоянным зазором 9. Диск 8 якоря разделен на две части 10 и 11 сквозной щелью 12, заполненной диамагнитным веществом и имеющей форму спирали 13 Архимеда, радиус р которой выбран из условия
+
2л
(р,
где РО начальный радиус спирали;
а - ширина торца центрального стержня 2 магнитопровода;
-угловая текущая координата спирали.
Плоскость 14 торцев стержней магнитопровода 1 параллельна плоскости диска 8 якоря. Вал 15, на котором жестко закреплен диск 8, связан с контролируемым объектом. Неподвижный магнитопровод 1 закреплен
0 по отношению к диску 8 так, что его продольная плоскость 16 симметрии совпадает с радиальной плоскостью диска 8, а центральный 2 стержень магнитопровода 1 расположен против щели 12, причем, при
5 вращении диска 8 стержень 2 находится между начальной 17 и конечной 18 точками спирали 13.
Датчик угловых перемещений работает следующим образом.
0В исходном положении якоря (см. фиг. 1)
участок щели 12 размещен в зоне торцевой поверхности центрального 2 стержня так, что дели- площадь этого торца на две равные час™. В этом положении якоря магнит5 ные потоки, создаваемые первичной 3 обмоткой в боковых 4 и 5 стержнях, вследствие одинаковых площадей и постоянной величины зазора 9 равны. Соответственно равны и ЭДС, создаваемые этими потоками
0 по вторичных 6 и 7 обмотках, а поскольку они включены встречно последовательно, то и выходной сигнал датчика угловых перемещений равен нулю. При угловом перемещении контролируемого объекта и
5 связанных с ним вала 15 с диском 8 щель 12 смещается в зоне торцевой поверхности центрального 2 стержня на величину, линейно пропорциональную контролируемому перемещению. Это приводит к перераспре0 делению магнитных потоков в боковых 4 и 5 стержнях, и, следовательно, к изменению величины ЭДС, наводимой во вторичных 6 и 7 обмотках к появлению на выходе датчика ЭДС, по величине и фазе которой определя5 ют величину и направление углового перемещения контролируемого объекта. Поскольку перераспределение магнитных потоков при вращении диска 8 происходит пропорционально изменению площадей
0 торцевой поверхности центрального 2 стержня и коэффициент пропорциональности постоянен, то датчик перемещений обеспечивает линейность выходной характеристики.
5 Формула изобретения
Датчик угловых перемещений, содержащий трехстержневой магнитопровод, размещенную на его центральном стержне первичную обмотку, расположенные на его боковых стержнях вторичные обмотки, соединенные встречно последовательно, и установленный с возможностью вращения якорь, имеющий сквозную щель, а центральный стержень магнитопровода размещен напротив щели, стержень магнитопровода размещен напротив щели, отличающийся тем, что, с целью повышения точности, якорь выполнен из диска и расположен так, что ось его вращения параллельна оси центрального стержня магнитопровода, который выполнен Ш-об- разным, торцы его стержней параллельны
Составитель Е.Агафонов
Техред М.МоргенталКорректор М.Керецман
0
плоскости якоря, а щель заполнена диамагнитным веществом и имеет форму спирали Архимеда, радиус/Э которой выбран из условия
P P°+YU P
где у00 - начальный радиус спирали;
а - ширина торца центрального стержня магнитопровода;
р- угловая текущая координата спирали.
17
УЗ
| Датчик угловых перемещений | 1984 |
|
SU1226037A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
