Изобретение относится к средства обработки, дистанционной передачи и представления оператору визуально информации и может быть использован в супервизорных системах управления роботами, например для управления движением робота по сложному трех мерному рельефу, а также для управления движением манипуляторов робота. Известны устройства, повышающие эффективность действия дистанционного управления робота-манипулятора за счет увеличения объема информационного обеспечения оператора путе стереоскопического представления трехмерной среды Qi Эти устройства обеспечивают возможность получения трехмерных изображений из двух плоских,но не создают у оператора эффект присутствия, т.е. эффект, при котором оператор воспринимает визуальную инфор мацию, как бы находясь в- зоне действия дистанционно-управляемого аппарата. Наиболее близким к изобретению является система дистанционной пере дачи визуальной информации телеуправляемого робота, содержащая бин кулярное оптическое устройство слежения за объектом по азимуту и углу места, снабженное механизмом сведения его оптических осей с помощью сервопривода, бинокулярное оптическое воспроизводящее устройство, укрепляемое на шлеме оператора, сис тему телевизионной передачи изображения от устройства слежения к воспроизводящему устройству, датчики . углов поворота шлема оператора и сервоприводы вращения устройства слежения, соединенные между собой следящей системой t Недостатком известной системы является низкий эффект стереоскопич ности за счет весьма узкой зоны стереоскопического видения по глубине. В указанной системе оптически оси глаз оператора сведе.ны и заранее направлены на определенньв экран, н пример, на экран телевизора. Сведен оптических осей глаз оператора не зависит от сведения оптических осей зеркальной отражательной системы бинокулярного устройства слежения, изменяющегося в широких пределах. При углах сведения оптических осей 892 зеркальной отражательной системы, стремящихся к О, при восприятии визуальной информации происходит наложение изображений различных предметов, вследствие чего реальное восприятие объектов становится невозможным . Цель изобретения - повьш1ение эффекта стереоскопичности. Цель достигается тем, что в системе дистанционной передачи визуальной информации телеуправляемого робота окуляры воспроизводящего устройства закреплены на поворотных осях, кинематически связанных между собой механизмами, осуществляющими сведение их оптических осей, причем окуляры снабжены датчиком угла сведения, а механизм сведения объективов связан с помощью следящей системы с этим датчиком. Окуляры воспроизводящего устройства и объективы устройства слежения связаны с соответствующими узлами системы телевизионной передачи изображения посредством волоконно-оптических регулярно уложенных жгутов и оптических согласующих устройств. На фиг.1 представлена принципиальная схема системы дистанционной передачи визуальной информации; на фиг.2 и 3 изображены фрагменты картин при стереоскопическом и моноскопическом восприятии трехмерного пространства оператором. Система содержит бинокулярное оптическое устройство слежения за объектом по азимуту и углу места, состоящее из двух объективов 1, закрепленных на вертикальных осях механизма 2, включающего две шестерни, находящиеся в зацеплении, посредством которого оптические оси пересекаются в Горизонтальной плоскости, образуя переменный угол сведения объективов. Механизм 2 приводится в движение сервоприводом 3 и укрепляется на платформе 4, которая под действием сревоприводов 5 и 6 поворачивается вокруг горизонтальной и вертикальных осей относительно корпуса робота 7. Объективы 1 двумя волоконно-оптическими регулярно уложенными жгутами 8 соединяются с оптическими согласующими устройствами 9, расположенными перед системой телевизионной передачи изображения, состоящей из телекамер 10, передающего устройства 1,линии12 связи,приемного устройства 13и телевизионныхмониторОБ 14 . Перед экранами последних расположены оптические согласующие устройства
15, связанные через волоконно-оптичес-5 кие регулярно уложенные жгуты 16 с двумя окулярами 17 бинокулярного оптического воспроизводящего устройства, закрепленного на вертикальных осях механизма 18, аналогично по 10
конструкции механизму 2 и приводимого в движение оператором. Механизм 18 снабжен датчиком 19 угла сведения оптических осей окуляров и крепится к шлему 20, надеваемому на голову 15 оператора. Шлем 20 имеет возможность поворачиваться вокруг горизонтальной t и вертикальной осей относительно неподвижного основания 21. На осях вращения пшема 20 укреплены датчики 20 22 и 23 углов поворота, которые через линию 24 связи и следящую систему 25 связаны с соответствующими сервоприводами 5 и 6. Датчик 19 также через линию 24 связи и следящую 25 истему 25 связан с сервоприводом 3,
Система работает следующим образом.
Изображение предмета, находяще- зо гося в вершине угла сведения оптических осей двух объективов 1, расположенных один от другого на расстоянии, примерно равном глазному базису, передается по волоконно-оптическим ясгутам 8 и оптическим согласующим устройствам 9 на мишени передающих телекамер 10. С передающих телекамер видеосигналы через передающее устройство 11, линию 12 связи и приемное устройство 13 поступают на входы телевизионных мониторов 14. Таким образом, на экранах мониторов возникают два изображения одного предмета, зарегистрированные с разных точек блюдения. Эти изображения образуют
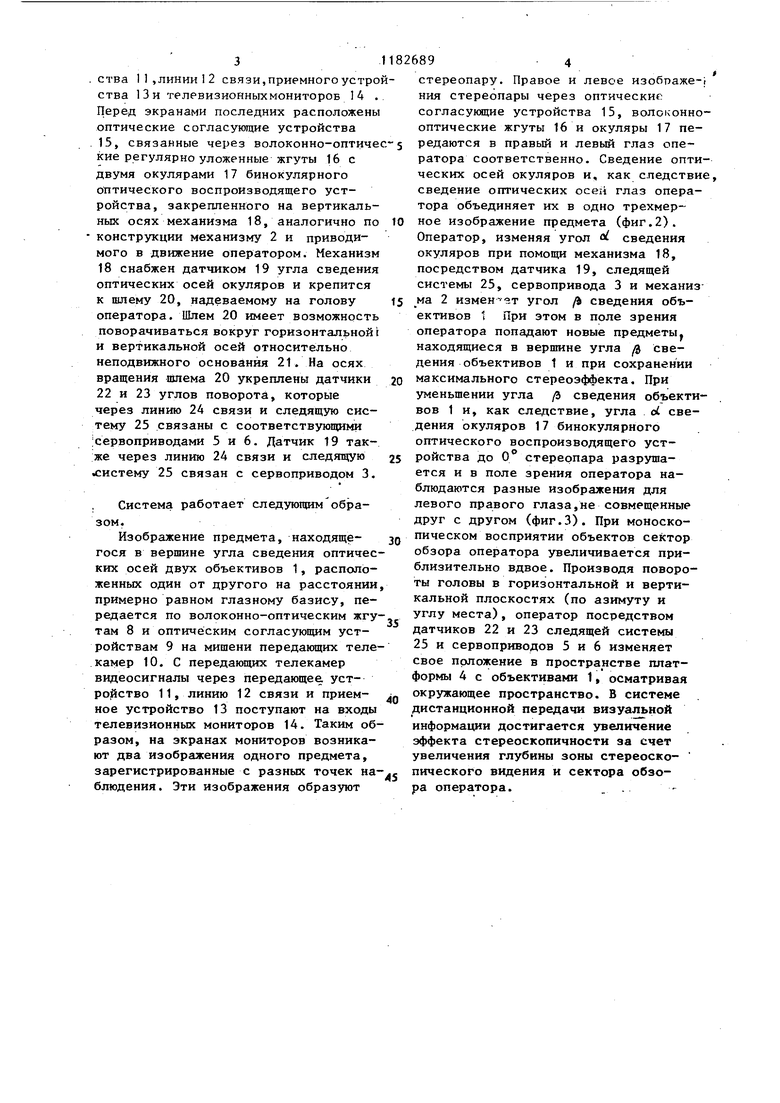
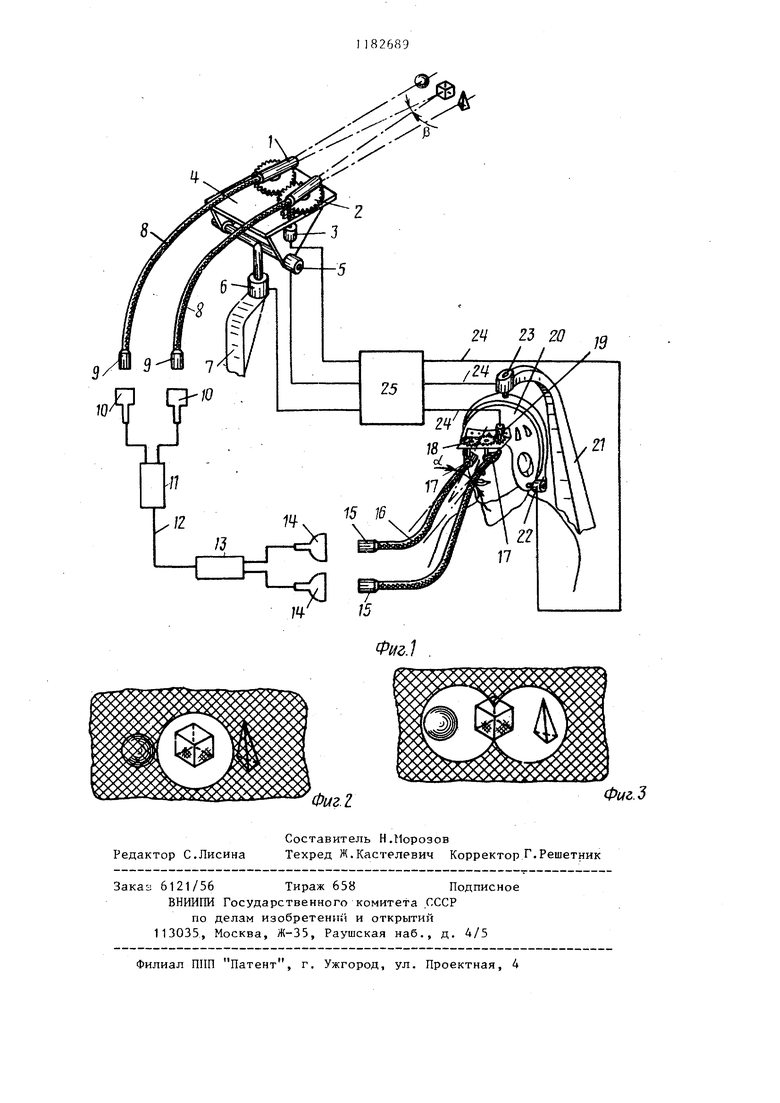
стереопару. Правое и левое изображе кия стереопары через оптические согласукщие устройства 15, волоконноптические жгуты 16 и окуляры 17 передаются в правый и левый глаз оператора соответственно. Сведение оптческих осей окуляров и, как следств сведение оптических осей глаз оператора объединяет их в одно трехмерное изображение предмета (фиг.2). Оператор, изменяя угол сведения окуляров при помощи механизма 18, посредством датчика 19, следящей системы 25, сервопривода 3 и механима 2 измен .т угол / сведения объективов 1 При этом в поле зрения оператора попадают новые предметы находящиеся в вершине угла ft сведения объективов 1 и при сохранении максимального стереоэффекта. При уменьшении угла /Э сведения объективов 1 и, как следствие, угла d сведения окуляров 17 бинокулярного оптического воспроизводящего устройства до 0° стереопара разрушается и в поле зрения оператора наблюдаются разные изображения для левого правого глаза,не совмещенные друг с другом (фиг.З). При моноскопическом восприятии объектов сектор обзора оператора увеличивается приблизительно вдвое. Производя повороты головы в горизонтальной и вертикальной плоскостях (по азимуту и углу места), оператор посредством датчиков 22 и 23 следящей системы 25 и сервоприводов 5 и 6 изменяет свое положение в пространстве платформы 4 с объективами 1, осматривая окружающее пространство. В системе дистанционной передачи визуальной информации достигается увеличение эффекта стереоскопичности за счет увеличения глубины зоны стереоскопического видения и сектора обзора оператора. . . 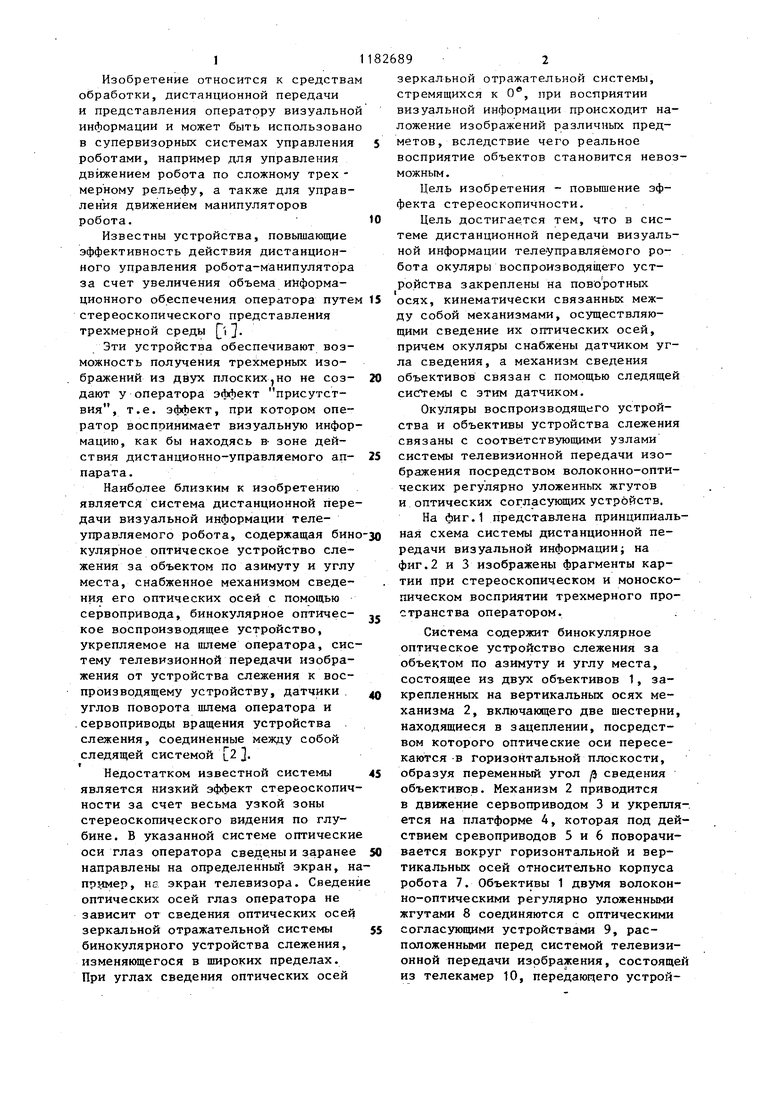
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР НАБЛЮДЕНИЯ | 1993 |
|
RU2042164C1 |
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО В ВИДЕ БИНОКУЛЯРНОЙ ЛУПЫ С АВТОМАТИЧЕСКИМ ФОКУСИРУЮЩИМ УСТРОЙСТВОМ | 2000 |
|
RU2273871C2 |
| МОНОКУЛЯРНАЯ ОДНОКАНАЛЬНАЯ СТЕРЕОТЕЛЕВИЗИОННАЯ СИСТЕМА | 1992 |
|
RU2014756C1 |
| Стереоскопическая телевизионная система | 1990 |
|
SU1787315A3 |
| ОЧКИ НОЧНОГО ВИДЕНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2279110C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ЗА ЗОНОЙ ВНЕКАБИННОГО ПРОСТРАНСТВА, НЕ ПРОСМАТРИВАЕМОЙ С РАБОЧЕГО МЕСТА ЛЕТЧИКА | 1992 |
|
RU2037208C1 |
| ФУНДУС-КАМЕРА | 2001 |
|
RU2214152C2 |
| Цифровые очки для восстановления и эмуляции бинокулярного зрения | 2022 |
|
RU2792536C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2339984C1 |
1. СИСТЕМА ДИСТАНЦИОННОП ПЕРВДАЧИ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ ТЕЛЕУПРАВЛЯЕМОГО РОБОТА, содержащая бинокулярное оптическое устройство слежения за объектом по азимуту и углу места, снабженное механизмом сведения его оптических осей с помощью сервопривода, бинокулярное оптическое воспроизводящее устройство, укрепляемое на щлеме оператора, систему телевизионной передачи изображения от устройства слежения к воспроизводящему устройству, датчики углов поворота шлема оператора и сервоприводы вращения устройства слежения, соединенные между собой следящей системой, отличающаяся тем, что, с целью повышения эффекта стериоскопичности, окуляры воспроизводящего устройства закреплены на поворотных осях, кинематически связанных между собой механизмами, осуществляющими сведение их оптических осей, причем окуляры снабжены датчиком угла сведения, а механизм сведения объективов связан с помощью следящей системы (Л с этим датчиком. 2. Система поп.1,отличаю щ а я с я тем, что окуляры воспроизводящего устройства и объективы устройства слежения связаны с соответствующими узлами системы телесх визионной передачи изображения по1С средством волоконно-оптических реО) гулярно уложенных жгутов и оптичес00 ких согласующих устройств. со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М., Машиностроение, 1978, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США №3670097, кл | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
