7
V (Puzf
Изобретение относится к робототехнике, а именно к устройствам визуального на- блюдения в системе дистанционного управления манипуляционным роботом в экстремальной среде, например,в горнодобывающем производстве, местах ликвидации последствий аварий, подводных работах.
Цель изобретения - расширение функциональных возможностей.
На фиг. 1 представлена структурная схема устройства управления; на фиг. 2 - структурная схема приемного блока; на фиг. 3 - структурная схема бортового блока; на фиг. 4 - кинематическая схема приводов телекамера; фиг. 5 - вид А на фиг. 4; на фиг, 6 - кинематическая схема приводов механизма наведения.
Устройство (фиг. 1) содержит стереотелевизионную камеру 1, механизм 2 наведения телекамеры, блок 3 согласования, образующие бортовой блок 4, размещенный на несущей конструкции 5 робота 6, и приемный блок 7, состоящий из блока 8 согласования, блока 9 управления, стерео- видеоконтрольного устройства (СВКУ) 10 и сепзрационных очков 11. Бортовой 4 и приемный 7 блоки соединены многоканальной линией 12 связи. .
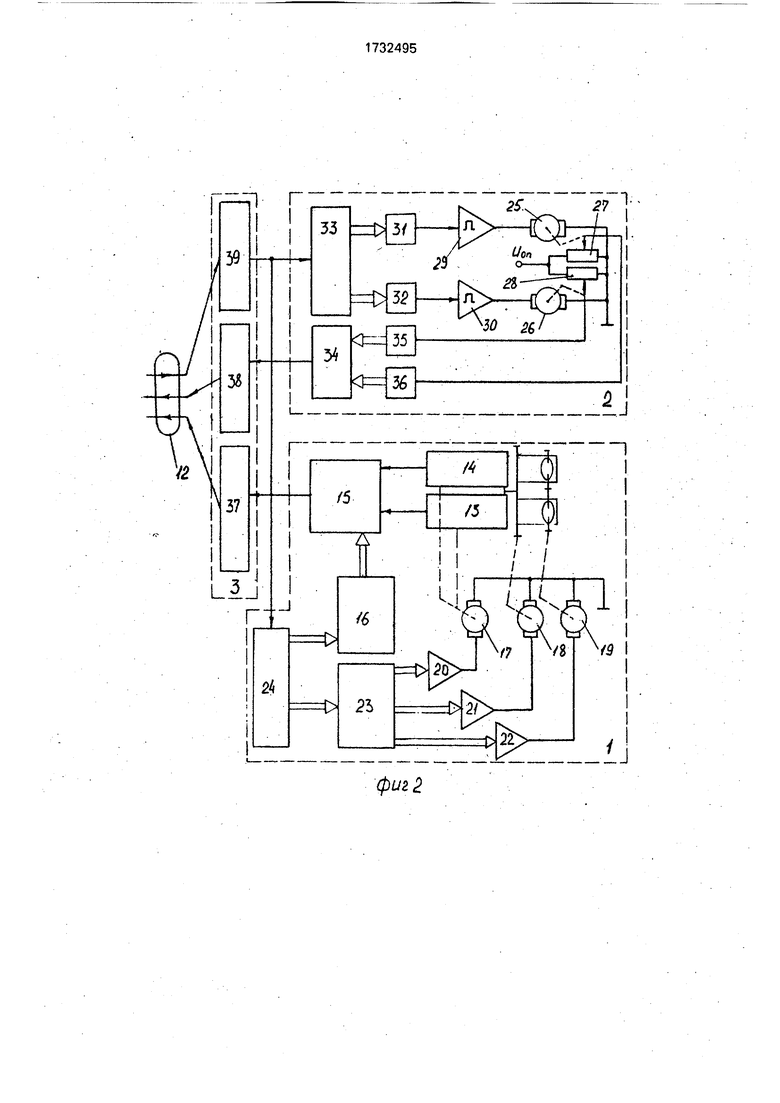
Стереотелевизионная камера (СТК) 1 (фиг. 2) содержит правый 13 и левый 14 каналы формирования видеосигнала, коммутатор 15, блок 16 выбора режима, электродвигатели приводов оптического сканирования 17, диафрагмы 18 и смены объективов 19, сервоусилители 20-22, блок 23 управления приводами, преобразователь 24 кода.
Механизм 2 наведения (фиг. 2, 5) телекамеры состоит из электродвигателей приводов азимута 25 и угла места 26, зубчатых передач 74-76, датчиков положения по азимуту 27 м углу места 28, ключевых усилителей 29 и 30, преобразователей код-длительность 31 и 32, преобразователей 33 и 34 кода, двух аналого-цифровых преобразователей (АЦП) 35 и 36.
Блок 3 согласования содержит магистральные передатчики 37 и 38, а также магистральный приемник 39.
Блок согласования 8 (фиг. 3) содержит магистральный передатчик 40 и магистральные приемники 41 и 42. Блок 9 управления имеет два независимых канала: канал управления ориентацией телекамеры и канал управления видеотрактом. Канал управле: ния ориентацией включает в себя двухстепенную рукоятку 43, кинематически связанную с датчиками 44 и 45, АЦП 46 и 47,
дешифраторы 55 и 56 и индикаторы 57 азимута и 58 угла места.
Канал управления видеотрактом содержит органы выбора режима, включающие
элементы управления оптическим сканированием по дистанции 50, установленные на рукоятке 43 управления диафрагмой 51, режимом Моно-стерео 52, сменой объективов 53 и шифратор 54.
0 Преобразователи 48 и 49 кодов соединены с блоком 59 обмена. Стереотелевизионная камера 1 (фиг. 4) содержит две пары объективов 60 и 61 с различным фокусным расстоянием (f2 и fi), установленные на по5 воротной турели 62, передающие телевизи- оннные трубки (ПП) правого 63 и левого 64 каналов, установленные на каретки 69, шар- нирно-рычажный механизм 65 и пару симметричных направляющих 66, а также
0 приводы 17 оптического сканирования по дистанции, диафрагмы 18 и смены объективов (изменения фокусного расстояния) 19.
Магистральные передатчики 37, 38 и приемник 39 блока 3 согласования соедине5 ны с соответствующими магистральными приемниками 41 и 42 и передатчиком 40 блока согласования 8 посредством трехка- нальной линии связи. Вход передатчика 40 подключен к выходу первого преобразова0 теля 48 кода, входы которого подключены к выходам первого 46 и второго 47 АЦП и выходу шифратора 54. К входу шифратора подключены органы управления оптическим сканированием 50, диафрагмой 51, ре5 жимом моно-стерео 52 и сменой объективов (масштаба) 53. Входы АЦП 46 и 47 подключены к выходам датчиков 44 и 45, кинематически связанных с двухстепенной рукояткой 43. Второй преобразователь 49
0 кода подключен к выходу приемника 42, а его выходы через дешифраторы 55 и 56 - к индикаторам азимута 57 и угла места 58, Блок 59 обмена подключен к входам преобразователя 48 кода и к выходам преобразо5 вателя 49 кода, его внешняя шина связана с внешним устройством управления (ЭВМ манипулятора). Выход магистрального приемника 41 подключен к входу видеоконтрольного устройства 10, снабженного сепа0 рационными светоклапанными очками 11. Выход приемника 39 подключен к входу третьего преобразователя 33 кода, две группы выходов которого образуют каналы управления по азимуту и углу места,
5 состоящие из последовательно соединенных преобразователей код - длительность 31 и 32, ключевых усилителей 29 и 30 и электродвигателей приводов 25 и 26, которые связаны зубчатыми передачами 74 и 75 с датчиками 27 и 28, выходы которых через
третий 35 и четвертый 36 АЦП подключены к входам четвертого преобразователя 34 кода, выход которого подключен к передатчику 38.
Стереотелевизионная камера содержит каналы формирования правого 13 и левого 14 стереоделенных изображений, видеовыходы которых-подключены к входам коммутатора 15, а его выход- к входу передатчика 37. Управляющие входы коммутатора 15 подключены к выходу блока 16 выбора режима, входы которого соединены с первой группой выходов пятого преобразователя 24 кода. Вторая группа его выходов подключена к входу блока 23 управления привода- ми, выходы которого через сервоусилители 20-22 подключены к приводам оптического сканирования 17, диафрагмы 18 и смены объективов 19. Привод оптического сканирования 17 через винтовую передачу 68 со- единен с ползуном 67, с которым симметрично соединен параллельными рычагами одинаковой длины шарнирно-ры- чажного механизма 65, с каретками 69. прижимаемыми пружинами 73 к направля- ющим 66, положение которых функционально связано с фокусным расстоянием fi и f2 объективов и стереоскопическим базисом ЕЙ и В2 (фиг. 5). Турель 62 через зубчатую передачу 70 соединена с приводом 19. При- вод 18 посредством двух зубчатых передач 71 и 72 связан с кольцами диафрагмы объективов 60 (61).
Устройство работает следующим образом.
В режиме моно оператор переключателем 53 устанавливает в стереотелевизионной камере короткофокусные объективы 60 напротив фотомишеней передающих телевизионных трубок 63 и 64.
При воздействии оператора на переключатель 50 осуществляется фокусирование изображения на экране видеоконтрольного устройства 10.
Управление поворотом (азимут) и на- клоном (угол места) оси камеры осуществляется отклонением рукоятки 43 от нейтрального положения. Величина и знак отклонения определяют направление и скорость перемещения оси камеры по указанным координатам. Сориентировав камеру в нужном направлении и определив, что на переднем плане изображения отсутствуют протяженные по глубине объекты, оператор переключателем 52 устанавливает режим Стерео.После переключения в режим сте- реонаблюдения включается второй канал телекамеры, при этом оптические оси каналов сконвергированы на сфокусированный план наведения. Далее возможно визуально контролировать сближение схвата манипулятора с объектом до расстояния, опреде- ляемого глубинной разрешающей способностью стереотелевизионной системы, представляющей наименьшее различимое оператором расстояние по глубине изображения. Для повышения глубинной разрешающей способности при наблюдении за точными перемещениями манипулятора 6 переключателем 53 устанавливаются объективы 61 с большим фокусным расстоянием. Привод 17, включаемый переключателем 50, поступательно перемещает каретки 69 с ПТТ относительно направляющих 66 и объективов, при этом происходит конвергирование оптических осей правого и левого каналов с одновременной фокусировкой объективов на настраиваемый план, т.е. оптическое сканирование по дистанции. При изменении освещенности зоны манипулирования регулирование освещенности фотомишеней ПТТ осуществляется изменением диафрагмы объективов от привода 18, включаемого переключателем 51. Ориентация телекамеры определяется с помощью индикаторов 57 и 58. Когда оптическое изображение сцены проецируется объективами 60 (6-1) на фотомишени передающих телевизионных трубок 63 и 64, видеосигналы формируются каналами 13 и 14 и поступают на коммутатор 15. В режиме Стерео коммутатор 15 подключает поочередно выходы каналов 13 и 14 к входу магистрального передатчика 37 так, что в смежных полях кадровой развертки передается изображение правого и левого ракурсов, например в четном поле - правого канала, а в нечетном - левого. На приемной стороне видеосигнал принимается магистральным приемником 41 и подается на вход стереоконтрольного устройства 10. Разделение изображений стереопары производится светоклапанны- ми стереоочками 11. Во время передачи четного поля открыт светоклапан правого глаза, а в нечетном - светоклапан левого глаза В результате сложения стереоделенных изображений возникает ощущение объема.
В режиме Моно один из каналов коммутатора 15 постоянно открыт и на экране СВКУ 10 воспроизводится изображение одного из ракурсов сцены, при этом светокла- паны обоих глаз постоянно открыты. Режим работы коммутатора задается блоком 16 выбора режима, представляющим собой логическое устройство, декодирующее команду, поступающую из блока 9 управления. Преобразователи 48 и 49 кодов образуют двунаправленную магистраль для передачи и приема цифровой информации.
Отклонение рукоятки 43 преобразуется датчиками 44 и 45 в электрический сигнал, который преобразуется АЦП 47 и 46 в параллельный двоичный код. Эти коды поступают на первую и вторую группы входов преобразователя 48 кода. На третью группу входов поступает параллельный коде выхода шифратора 54, к входам которого подключены органы управления оптическим сканированием 50, диафрагмой 51. режимом Моностерео 52 и сменой объективов 53. Преобразователь 48 кода осуществляет преобразование параллельного кода в последо- вательный и модулирует им сигнал магистрального передатчика 40. Модулированный сигнал по одному из каналов линии 12 связи поступает на вход магистрального приемника 39 и далее на входы преобразователей 33 кода в механизме 2 . наведения в СТК 1.
В преобразователе 33 кода происходит обратное преобразование последовательного кода в параллельный и выделение групп разрядов (бит), несущих информацию о режиме ориентации камеры. Эти коды поступают на преобразователи код - длитель- ность 31 и 32, где формируются последовательности импульсов постоянной частоты, длительность которых пропорциональна числу, содержащемуся в коде команды (ШИМ-сигнал). Эти импульсы поступают на ключевые усилители 29 и 30, управляющие электродвигателями приводов азимута 25 и угла места 26. Скорость вращения двигателей тем больше, чем шире импульс управления, т,е. чем больше число в коде команды, пропорциональное углу отклонения рукоятки 43. Разряд в коде команды. определяющий знак числа, управляет полярностью выходного импульса преобразователей 31 и 32 и тем самым задает направление вращения двигателей 25 и 26. Перемещение приводов 25 и 26 преобразуется датчиками 27 и 28 в электрический сигнал, который, в свою очередь, преобразуется в параллельный код АЦП 35 и 36 и поступает на преобразователь 34 кода. С его выхода последовательный код, содержащий информацию о текущем положении оси камеры, поступает на вход магистрального передатчика 38. Сигнал последнего по линии 12 связи поступает на вход магистрального приемника 42 и преобразуется в параллельный код преобразователем 49 кода. Группа разрядов, содержащих информацию об азимуте, декодируется дешифратором 55 и содержимое этой группы отображается индикатором 57 азимута. Аналогично, информация об угле места декодируется дешифратором 56 и отображается на индикаторе 58 угла места.
В устройстве предусмотрен режим управления от ЭВМ манипуляционного робота. Он осуществляется через блок 59 обмена, выходы которого непосредственно управляют преобразователем 48 кода, зада0 вая режим работы системы через команды управления манипулятором. В этом режиме возможно, например обеспечить автоматическое сопровождение схвата манипулятора в поле зрения СТК или управление
5 телевизионной системой по другой программе, не отвлекая оператора на манипуляции органами управления телевизионной системы, что весьма важно при выполнении транспортных и манипуляционных опера0 ций в стесненном пространстве при дефиците времени. При этом, информация об истинном положении оси визирования СТК поступает в ЭВМ через преобразователь 49 кода и блок 59 обмена. Дискретные команды
5 управления СТК декодируются преобразователем 24 кода в параллельный. Группа разрядов, содержащих информацию о положении переключателя 52 Режим моностерео поступает на вход блока 16 выбора
0 режима где преобразуется в сигнал управления коммутатором 15. как было описано выше.
Группа разрядов, управляющая приводами СТК декодируется блоком управле5 ния приводами 23. При включении переключателя 50 шифратор 54 вырабатывает соответствующую кодовую комбинацию, которая, поступив на вход блока 23, вызывает включение сервоусилителя 20 и
0 двигателя привода оптическим сканированием по дистанции 17. Аналогично работают каналы управления диафрагмой (переключатель 51 - сервоусилитель 21 - двигатель 18) и смены масштаба (фокусного
5 расстояния) (переключатель 53 - сервоусилитель 22 - двигатель 19).
Формула изобретения Устройство управления телевизионной системой манипуляционного робота, содер0 жащее в составе бортового блока стереотелевизионную камеру, механизм наведения с приводами поворота, наклона и оптического сканирования при дистанции стереоскопической камеры, а в составе приемного
5 блока - видеоконтрольное устройство, экран которого оптически связан с очками оператора, отличающееся тем, что. с целью расширения функциональных возможностей, введены блок управления, первый и второй блоки согласования, соединенные многоканальной линией связи, причем первый блок согласования соединен со стереотелевизионной камерой и механизмом наведения, а второй блок согласования соединен с блоком управления и видеоконтрольным устройством, электрически связанным с очками оператора, при этом блок управления содержит задающий элемент вектора скорости поворота камеры, кинематически связанный с задающими датчиками поворота, выходы которых через первый и второй аналого-цифровые преобразователи подключены к первой и второй группам входов первого преобразователя кода, к третьей группе входов которого через шифратор подключены органы дистанционного управления фокусным расстоянием, диафрагмой и сведением оптических осей, а к четвертой группе входов подключена первая шина блока обмена, вторая и третья шины которого подключены соответственно к устройству управления манипулятором и первому выходу второго преобразователя кода, второй и третий выходы которого через дешифраторы подключены к индикаторам азимута и угла места, а вход - к выходу первого приемника второго блока согласования, содержащего также второй приемник, выход которого подключен к входу видеоконтрольного устройства, и передатчик, вход которого подключен к выходу первого преобразователя кода блока управления, механизм наведения, содержащий упомянутые приводы поворота и наклона, входы каждого из которых через соответствующие ключевой усилитель и преобразователь код - длительность подключены к соответствующим выходам третьего преобразователя кода, а выходы кинематически связаны со следящими датчиками поворота,,
выходы которых через третий и четвертый аналого-цифровые преобразователи связаны с четвертым преобразователем кода, выход которого подключен к первому передатчику первого блока согласования, а
в стереотедевизионную камеру введены коммутатор, сигнальные входы которого подключены к выходам канала формирования стереоделенных сигналов, выход - к входу второго передатчика первого блока
согласования, управляющий вход подключен к блоку выбора режима, входы которого соединены с первой группой выходов пятого преобразователя кода, вторая группа выходов которого через блок управления приводами соединена с входами сервоусилителей приводов диафрагмы, изменения фокусного расстояния и приводом сведения оптических осей, а входы третьего и пятого преобразователей кода
подключены к выходу приемника первого блока согласования.

| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| ТЕЛЕКАМЕРА НА ОСНОВЕ ФОТОПРИЕМНОЙ МАТРИЦЫ ПЗС | 1996 |
|
RU2129337C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА НАБЛЮДЕНИЯ ОБЪЕКТА | 1991 |
|
RU2014747C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СТЕРЕОТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2030119C1 |
| Устройство для считывания информации с подвижных объектов | 1988 |
|
SU1576395A1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343408C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343411C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343407C2 |



Изобретение относится к робототехнике, в частности к устройствам визуального наблюдения и дистанционного управления манипуляционным роботом. Цель изобретения - расширение функциональных возможностей системы. Устройство содержит стереотелевизионную камеру 1, механизм 2 наведения, первый и второй блоки 3, 4 согласования, блок 5 управления,стереовиде- оконтрольное устройство 6, сепарационные очки 7. Суть изобретения состоит в уменьшении времени адаптации системы путем управления скоростью ориентации телекамеры одновременно по двум координатам, масштабирования, индикации, ориентации телекамеры. 6 ил.
фиг 2
Фиг.З
л |
X
X
X X X
yZZ
fa-g L . -L r
S S S / S
Я 75 7б
фиг.Ь
| Устройство управления стереоскопической телевизионной камерой | 1980 |
|
SU940135A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
