Изобретение относится к электротехнике, преимущественно к электрическим машинам, и может быть использовано для косвенного контроля неравномерности воздушного зазора электрических машин в процессе их изготовления, эксплуатации и ремонта.
Целью изобретения является повышение точности и ускорение процесса измерения.
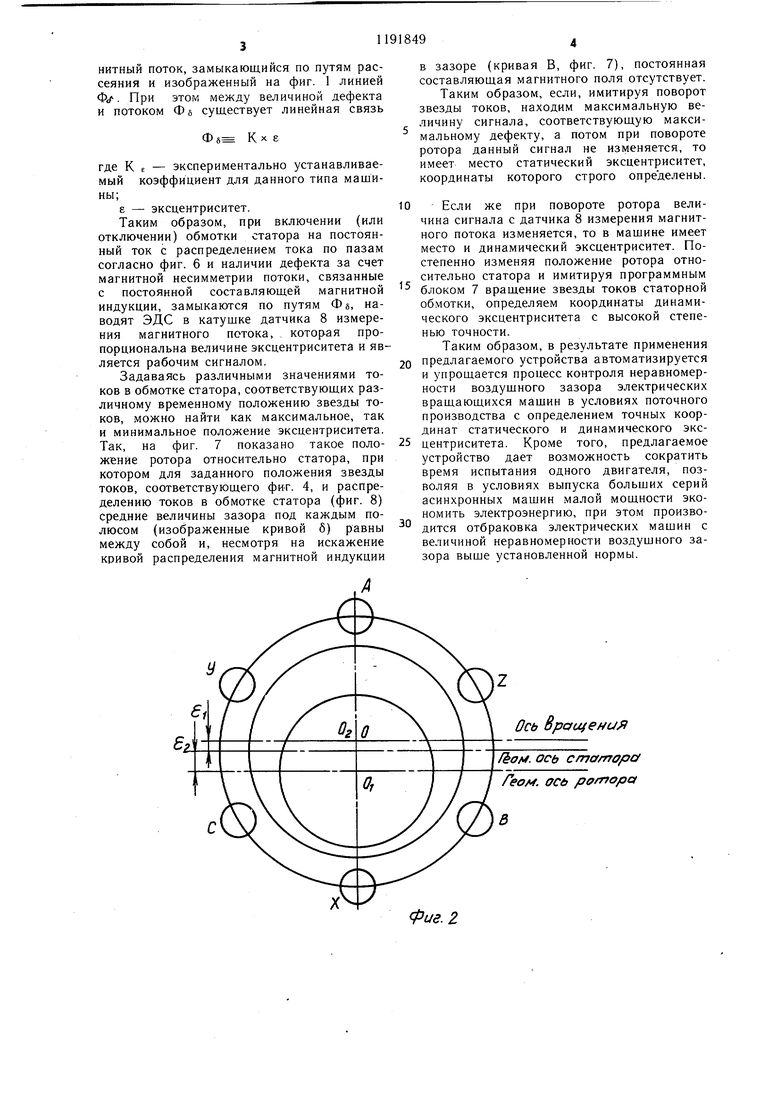
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 - условная схема размещения статорных катушек двухполюсной асинхронной машины и взаимное расположение статора и ротора относительно условной линии симметрии воздушного зазора при наличии статического эксцентриситета 8i и динамического 2; на фиг. 3 и 4 - примеры задания токов в фазах статора для двух моментов времени, соответствующих условному начальному временному положению звезды токов и ее повороту на 30 эл. град соответственно; на фиг. 5 - кривая распределения намагничивающей силы HS вдоль воздушного зазора; на фиг. 6 - распределение тока по пазам при наличии дефекта за счет магнитной несимметрии; на фиг. 7 - положение ротора относительно статора при положении звезды токов соответственно фиг. 4 и кривая индукции В в зазоре; на фиг. 8 - распределение токов в обмотке статора при положении звезды токов статора соответственно фиг. 4.
Устройство содержит блок питания 1, регуляторы 2-4 постоянного тока, блок 5 коммутации фаз статорной обмотки, испытуемую электрическую машину 6, программный блок 7, датчик 8. измерения магнитного потока, блок 9 сравнения, индикатор 10 контроля.
Устройство работает следующим образом.
В качестве измеряемого параметра, по изменению которого судят о наличии эксцентриситета, выбирается величина потока рассеяния, обусловленная наличием постоянной составляюш.ей магнитной индукции в зазоре при симметричной намагничивающей силе, вызванной несимметрией магнитной системы.
В определенной точке конвейера статорные обмотки испытуемой электрической машины 6 подключаются на короткое время к соответствующим выходам регуляторов 2-4 постоянного тока через блок 5 коммутации фаз статорной обмотки. Величина тока в каждой из фаз статорной обмотки испытуемой электрической машины 6 задается программным блоком 7 и соответствует мгновенным значениям звезды фазных токов для фиксированного момента времени. При подключении статорных обмоток испытуемой электрической машины б через регуляторы 2-4 постоянного тока к источнику 1 питания блоком 5
коммутации фаз (фиг. 3, 4) по обмоткам протекают постоянные по величине токи, создающие магнитный поток в воздушном зазоре и магнитной системе электрической мащины. В случае несимметрии магнитной системы появляется постоянная составляющая магнитного потока, которая замыкается по путям, изображенным на фиг. 1 линией Фб. Измерение магнитного потока Фб производят при включе0 НИИ или отключении мащины от источника питания. Потоком рассеяния Фб наводится ЭДС в катушке датчика 8 измерения магнитного потока. Сигнал с датчика 8 измерения магнитного потока поступает на вход блока 9 сравнения, где сравнивается с эталонным значением. Если измеряемая величина ЭДС превышает допустимое эталонное значение, то блок 9 сравнения выдает сигнал на индикатор 10 контроля и данная машина признается негодной.
0 Данное устройство, кроме отбраковки изделий, позволяет получить данные как о наличии статического эксцентриситета, так и динамического и их координат. Возможность определения координат динамического и статического эксцентриситета при
помощи предлагаемого устройства вытекает из принципа его работы и может быть объяснена следующими примерами.
На фиг. 3 изображена звезда токов в статорной обмотке для фиксированного
Q момента времени, совмещенная с комплексной плоскостью. Регуляторы 2, 3 и 4 тока запитывают обмотку ста1тора по команде программного блока 7 током, величина которого равна проекции вектора тока соответствующей фазы на вещественную ось. На фиг. 4 изображено распределение обмотки по пазам двигателя с и величиной тока в катущках, соответствующих положению звезды, изображенной на фиг. 3.
На фиг. 5 ступенчатой кривой Н показано распределение намагничивающей силы вдоль воздушного зазора на полюсном делении, соответствующее распределению тока в статорных обмотках. При этом кривая б отражает крайний случай несимj метрии, когда средняя величина воздушного зазора под одним полюсом минимальна (5,), а под другим - максимальна (62). Такому положению ротора при заданном распределении тока в обмотках статора соответствует распределение индукции в
0 воздущном зазоре, изображенное на фиг. 5 кривой В с максимальным значением индукции Bmj, под одним полюсом-с минимальным воздушным зазором 6i и с минимальным значением индукции Вт под другим полюсом с максимальным воздущным зазором бг. Нарущение симметрии магнитного поля приводит к возникновению постоянной составляющей индукции Во (фиг. 5) в воздущном зазоре, с которой связан ма,гнитный поток, замыкающийся по путям рассеяния и изображенный на фиг. 1 линией . При этом между величиной дефекта и потоком Фб существует линейная связь
Фб KX е
где К с - экспериментально устанавливаемый коэффициент для данного типа мащины;
Е - эксцентриситет.
Таким образом, при включении (или отключении) обмотки статора на постоянный ток с распределением тока по пазам согласно фиг. 6 и наличии дефекта за счет магнитной несимметрии потоки, связанные с постоянной составляющей магнитной индукции, замыкаются по путям Ф s, наводят ЭДС в катущке датчика 8 измерения магнитного потока, . котор-ая пропорциональна величине эксцентриситета и является рабочим сигналом.
Задаваясь различными значениями токов в обмотке статора, соответствующих различному временному положению звезды токов, можно найти как максимальное, так и минимальное положение эксцентриситета. Так, на фиг. 7 показано такое положение ротора относительно статора, при котором для заданного положения звезды токов, соответствующего фиг. 4, и распределению токов в обмотке статора (фиг. 8) средние величины зазора под каждым полюсом (изображенные кривой б) равны между собой и, несмотря на искажение кривой распределения магнитной индукции
в зазоре (кривая В, фиг. 7), постоянная составляющая магнитного поля отсутствует. Таким образом, если, имитируя поворот звезды токов, находим максимальную величину сигнала, соответствующую максимальному дефекту, а потом при повороте ротора данный сигнал не изменяется, то имеет место статический эксцентриситет, координаты которого строго определены.
0 Если же при повороте ротора величина сигнала с датчика 8 измерения магнитного потока изменяется, то в мащине имеет место и динамический эксцентриситет. Постепенно изменяя положение ротора относительно статора и имитируя программным
блоком 7 вращение звезды токов статорной обмотки, определяем координаты динамического эксцентриситета с высокой степенью точности.
Таким образом, в результате применения
0 предлагаемого устройства автоматизируется и упрощается процесс контроля неравномерности воздушного зазора электрических вращающихся машин в условиях поточного производства с определением точных координат статического и динамического эксцентриситета. Кроме того, предлагаемое устройство дает возможность сократить время испытания одного двигателя, позволяя в условиях выпуска больших серий асинхронных мащин малой мощности экономить электроэнергию, при этом производится отбраковка электрических машин с величиной неравномерности воздушного зазора выше установленной нормы.
фиг. 2 ffctf Врощеии . ось cmcffTTopa feoM. ось py/rtopci
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1250998A1 |
| Устройство для измерения неравномерности воздушного зазора электрической машины | 1983 |
|
SU1120257A1 |
| УСТРОЙСТВО РЕЛЕЙНОЙ ЗАЩИТЫ ОТ ВИТКОВЫХ ЗАМЫКАНИЙ СТАТОРНОЙ ОБМОТКИ ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2019 |
|
RU2705788C1 |
| АСИНХРОННЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2017 |
|
RU2673566C1 |
| Способ контроля неравномерности воздушного зазора асинхронного двигателя с трехфазной обмоткой на статоре | 1985 |
|
SU1288636A1 |
| МАЛОШУМНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2017 |
|
RU2660442C2 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2015 |
|
RU2604051C1 |
| МАЛОШУМНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2507664C2 |
| Электрическая машина | 1985 |
|
SU1267536A1 |
| Устройство для косвенного контро-ля НЕРАВНОМЕРНОСТи ВОздушНОгО зАзОРАэлЕКТРичЕСКиХ ВРАщАющиХСя МАшиН | 1979 |
|
SU813603A1 |

УСТРОЙСТВО ДЛЯ КОСВЕННОГО КОНТРОЛЯ НЕРАВНОМЕРНОСТИ ВОЗДУШНОГО ЗАЗОРА ЭЛЕКТРИЧЕСКИХ ВРАЩАЮЩИХСЯ МАШИН с ротором и трехфазной обмоткой на статоре, содержащее блок питания, блок коммутации фаз статорной обмотки, блок сравнения с элементом задания напряжения уставки. программный блок в виде узлов временного управления блоком коммутации фаз и блоком сравнения, индикатор контроля, при .этом выход блока коммутации подключен к статорной обмотке, первый выход программного блока соединен с управляющим входом блока коммутации, а второй - с первым входом блока сравнения, выход которого соединен с индикатором контроля, отличающееся тем, что, с целью повышения точности и ускорения процесса измерения, устройство снабжено регуляторами постоянного тока, включенными между блоком питания и блоком коммутации фаз и соединенными с управляемым программным блоком, и датчиком магнитного потока, предназначенным для установки на торце машины концентрично «g оси и подключенным к второму входу блока сравнения.С/г
| Авторское свидетельство СССР № 542409, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для косвенного контро-ля НЕРАВНОМЕРНОСТи ВОздушНОгО зАзОРАэлЕКТРичЕСКиХ ВРАщАющиХСя МАшиН | 1979 |
|
SU813603A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
