t Изобретение относится к электрическим машинам и может быть использовано при ремонте и эксплуатации электрическихмашин переменного и постоянного тока, например в автоматизированных диагностических комплексах. Цель изобретения - повышение чувствительности устройства. На фиг. 1 приведена схема устройства для контроля вибрации элек трической машины; на фиг. 2 - временные диаграммы, поясняющие принцип его действия. Устройство включает в Себя опера ционный усилитель 1, синхронно-коммут11руеья 1й RC -фильтр, содержапу-п резистор 2, коммутируемые конденсаторы 3, ключи 4, распределитель а также детектор 6 средневыпрямпен ного значения, компаратор 7, формирователь 8, умножитель 9, датчик 10пульсаций тока, полосовой фильтр 11и измерительный Прибор 12. Устройство работает следующим образом. С датчика 10 пульсаций тока электрический сигнал, содержацщйр личные спектральные составляющие, посту{1ает на режекторный фильтр, к торый производит подавление основной и кратных ей гармоник питающег напряжения (помехи). Полосовой фильтр 1I odyщecтвляeт выделение и формативной составляющей спектра пульсаций, частоту либо амплитуду которой измеряет прибор. Автоматическая настройка реж кторного фильтра осуществляется сле ющим образом. На неинвертизующий вход операцио ного усилителя 1 поступает исходное напряжение, содержащее исследуемйш спектральные составляющие и помеху представляющую собой первую -и другие гармоники тока электрической ма шины. Помеха с выхода устройства выделяется синхронно-коммутируемым К -ф1ШЬтром и подается на инвертиру щий вход усилителя 1. Б установившемся режиме напряжения помехи, воз действующее на инвертирующий и неин вертирую1ций входы операционного уси лителя, равны, что приводит к компенсации помехи на выходе устройства. Исходный сигнал (диаграмма А) по тупает на вход компаратора 7, на 112 второй вход которого подается средневыпрямленное значение исходного сигнала (диаграмма Б) , выделенноедетектором 6 средневыпрямленного значения. На выход компаратора проходит -только сигнал, превосходящий средневыпрямленное значение, т.е. сигнал, следующий с частотой помехи, значительно превосходящий по уровню измеряемые сигналы (диаграмма В). Образующиеся на выходе компаратора 7 импульсы нормализуются с помощью формиробателя 8 и подаются на умнохситель 9, который производит умножение частоты следования импульсов на коэффициент умножения, равный числу коммутируемых конденсаторов в синхронно-коммутируемом фильтре {диаграмма Д). Импульсы с выхода. умножителя 9 поступают на распределитель 5, осуществляющий последовательную .коммутацию конденсаторов 3 с помощью подачи на управляющие входы ютючей 4 коммутирующих сигналов (диаграммы Е, Ж и и). За счет соответствия коэф4ициента умножения умножителя 9 числу конденсаторов 3, последние будут всегда коммутироваться с частотой выделенного компаратором 7 сигнала, т.е. с частотой помехи, следовательно, режекторный фильтр всегда будет настроен на частоту помехи независимо от ее флуктуации. Таким образом, сигнал помехи сам производит настройку на собственную частоту, независимо от ее величины и характера изменения во времени. I Синхронный RC -фильтр, коммутируемый импульсами длительностью Т Т2...Т/п, где Т l/fg - период повторения импульсов (fo - частота повторения импульсов коммутации), п - число коммутируемых конденсаторов, имеет ярко выраженную гребенчатую форму частотной характеристики. На частотах, кратных частоте коммутации f , относительный коэффициент передачи определяется выражениемгде А - коэффициент передачи; п - число коммутируемых конденсаторов;К - номер гармоники частоты iff, Полоса пропускания фильтра вычисляется по формуле
af ()
где R и С - сопротивление резистора и емкость конденсаторов фильтра.
Благодаря подавлению синхронным. режекторным фильтром не только первой, но и высших гармоник помехи, а также самонастройке его на. час)97011
тоту помехи уровень мешающих сигналов на выходе полосового фильтра
значительно снижается, что позволяет повысить чувствительность измерительного прибора и устройства в целом. При этом обеспечивается контроль работы подшипников в машинах с изменяющейся и заранее неизвестной частотой помехи.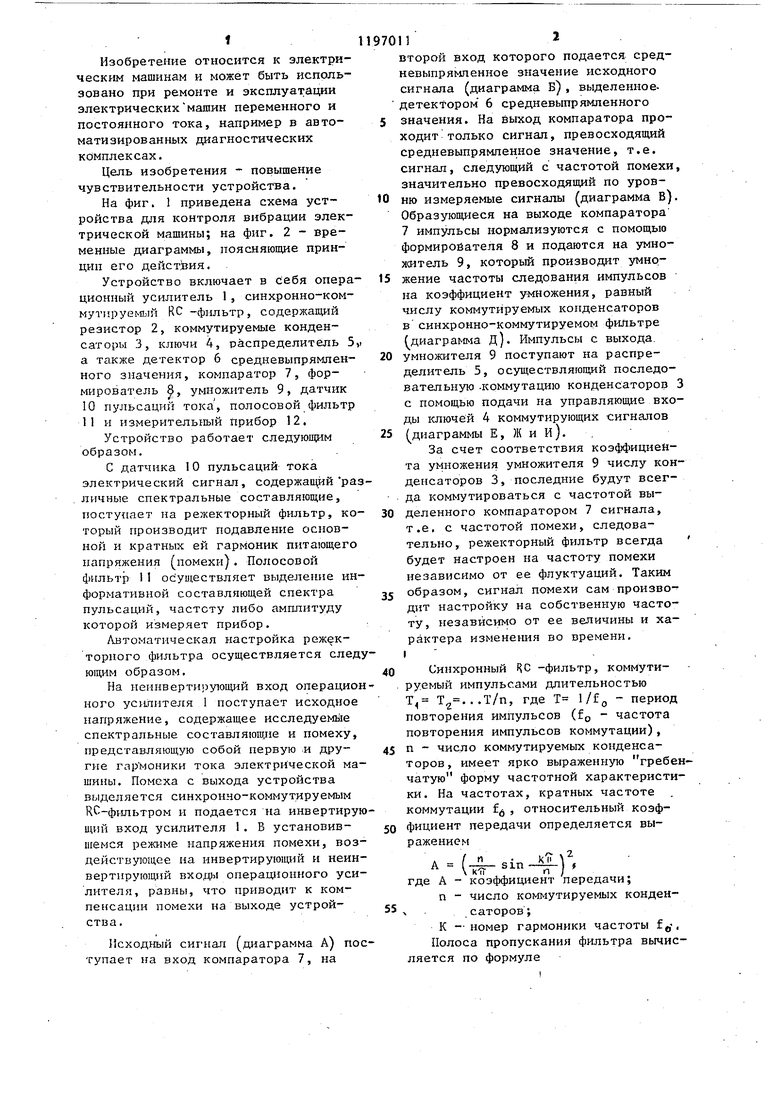

| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронный режекторный фильтр | 1983 |
|
SU1116536A1 |
| Синхронный режекторный фильтр | 1980 |
|
SU896757A1 |
| Синхронный заградительный фильтр | 1981 |
|
SU985936A1 |
| Устройство контроля параметров | 1983 |
|
SU1164667A1 |
| КОММУТИРУЕМЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ НЕСИНУСОИДАЛЬНОСТЬЮ НАПРЯЖЕНИЯ | 2006 |
|
RU2310972C1 |
| Устройство для сглаживания пульсаций | 1984 |
|
SU1354355A1 |
| Синхронный режекторный фильтр | 1987 |
|
SU1494211A1 |
| СИНХРОННЫЙ ГРЕБЕНЧАТЫЙ ФИЛЬТР | 2000 |
|
RU2194359C2 |
| Синхронный режекторный фильтр | 1983 |
|
SU1142888A1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ ЭЛЕКТРРМЕСКОЙ МАШИНЫ, содержащее последовательно соединенные датчик пульсаций тока, режектор1а 1й и полосовой фильтры низмерительный прибор, отличающееся тем, что, с целью повышения чувствительности, в устройство введены последовательйо соединенные детектор средневыпрякленного значения, компаратор, формирователь импульсов и умножитель, а режекторный фильтр включает в себя операционный усилитель и включенный в его цепь отрицательной обратной связи синхронно-коммутируемый RC-фильтр, к управляющему входу которого подключен выход умножителя, а второй вход компаратора и вход детектора подключены к датчику пуль(Л саций тока.
| Морозов В.П | |||
| Узконаг(осный синхронный фильтр | |||
| -Радио, 1972, № 11, с.53-54 | |||
| Устройство для контроля подшипников электрической машины | 1981 |
|
SU983912A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство контроля подшипников электрической машины | 1982 |
|
SU1035732A1 |
| Н 0.2 К 15/00, 1982 | |||
