Изобретение относится к трубопроводам, в частности переменной длины и может быть использовано на гидрошахтах в гидромонтажных забоях с механогидравлическими машинами и агрегатами.
Цель изобретения - повышение надежности и расширение технологических возможностей при использовании трубопровода на несамоходных питаемых объектах - достигается за счёт снабжения трубопровода средством уп|)авления гидроцилиндра, сооб1Цаюш,им ЛИНИ19.,нагнетания маслонасоса с управляюш,ей камерой путем занирания ее, изменения величины давленияв ней и переключения ее iwa дросселируемый слив. ,,
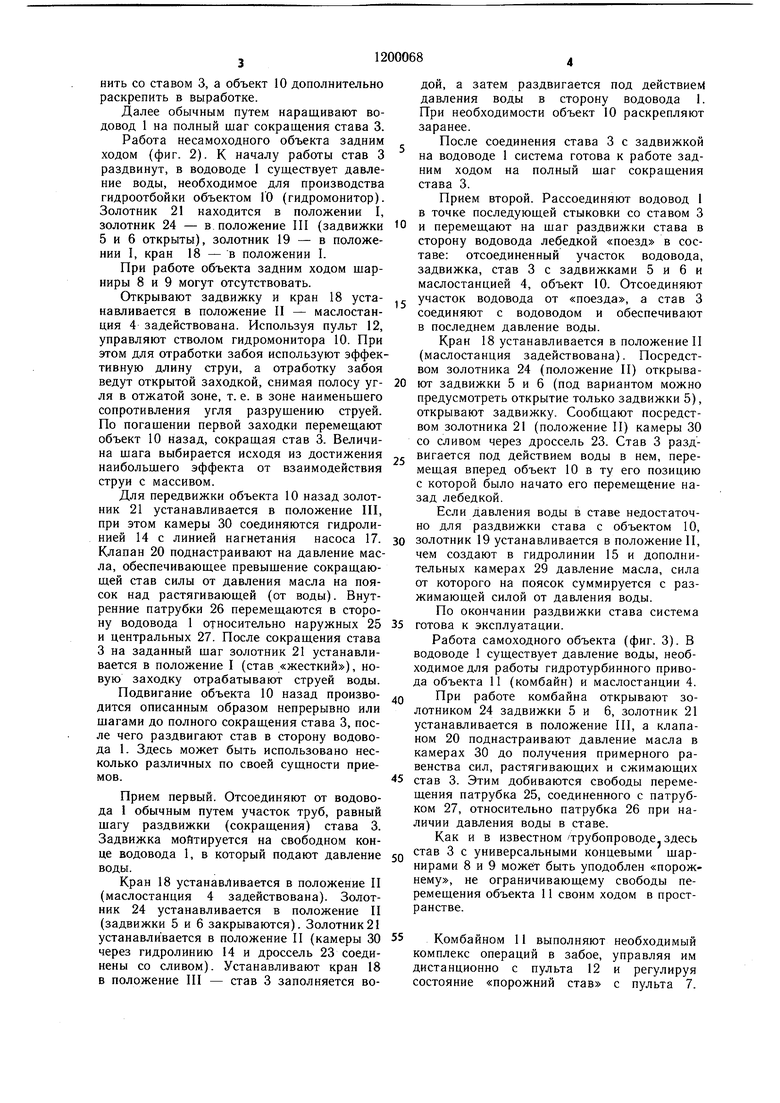
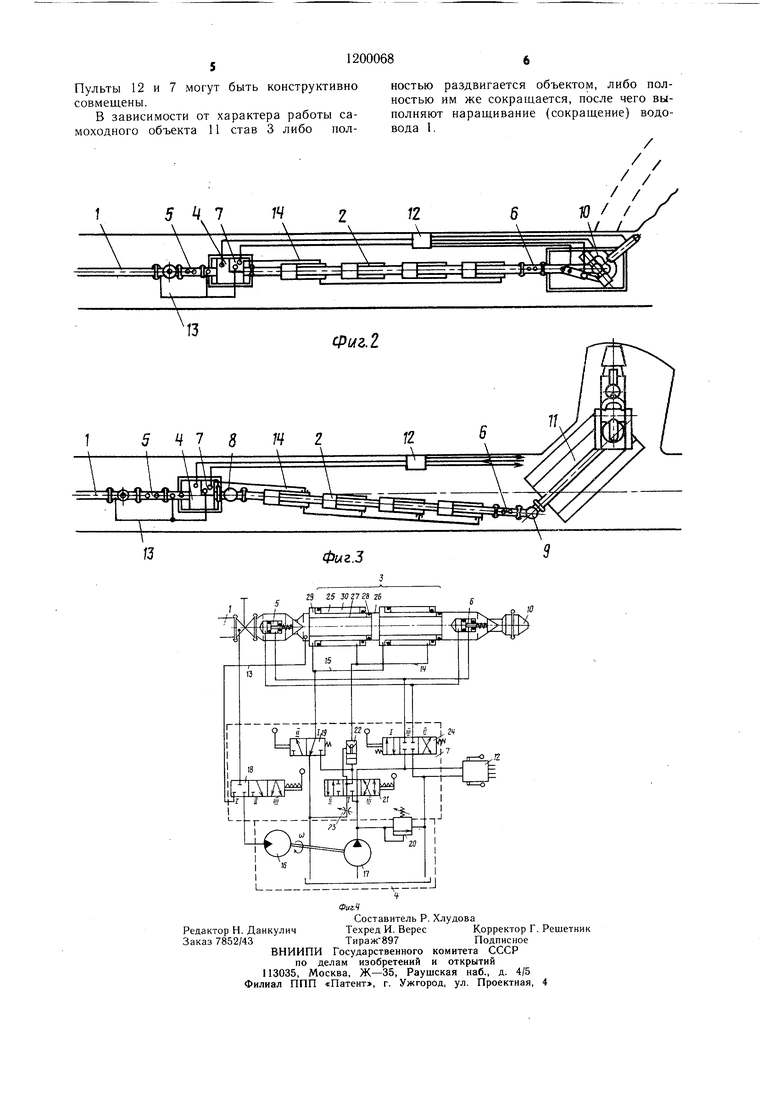
На фиг. 1 представлена схема питания несамоходного гидромонитора при работе прямым ходом (профильная проекция); на фиг. 2 - то же, при работе задним ходом (вид сверху); на фиг. 3 - схема питания самоходного комбайна при очистной выемке, вид сверху; на фиг. 4 - гидромеханическая схема управления телескопическим ставом. Устройство включает жесткий водовод 1 с ручной задвижкой, состоящий из водопроводящих гидроцилиндров 2, образуюпщх гирляндный телескопический став 3 с маслостанцией 4, концевыми задвижками 5 и 6, пультом 7 управления концевыми универсальными шарнирами 8 и 9 и питаемые объекты - несамоходный гидромонитор 10 и комбайн 11 с гидротурбинным приводом, соответственно с пультом 12 их управления, байпасная линия 13, гидролиния 14 управления и вспомогательная гидролиния 15.
Маслостанция 4 содержит гидротурбины 16 и насос 17.
Пульт 7 управления телескопическим ставом 3 включает кран 18 управления турбиной 16, золотник 19 раздвижки става 3, предохранительный клапан 20, золотник.21 сокращения става 3, гидрозамок 22, дроссель 23, золотник 24 управления задвижками 5 и 6.
Каждый водопроводящий гидроцилиндр 2 телескопического става 3 содержит наружный 25 и внутренний 26 патрубки, причем с наружным патрубком жестко соединен центральный патрубок 27, уплотненный с полостью става уплотнением 28. Между наружным, внутренним и центральным патрубками расположена дополнительная управляющая камера 29, а между наружным и внутренним патрубками - основная управляющая камера 30. Камеры 29 и 30 разделены между собой поршневым пояском на внутреннем патрубке 26, который сочленен с наружным патрубком 25 смежного гидроцилиндра.
Работа несамоходного объекта передним ходом (фиг. 1). К началу работы став 3 сокращен, в водоводе 1 существует давление воды, необходимое для производства гидроотбойки объектом 10 (гидромонитор). Золотник 21 - находится в положении I (гидролиния 14 заперта гидрозамком 22),
золотник 24 - в положении III (удерживает запорные элементы задвижек 5 и 6 в открытом положении), золотник 19 - в положении I (вспомогательная гидролиния 15 соединена со сливом), кран 18 - в положении I (питание турбины 16 отключено,
байпасная линия 13 закрыта).
При работе объекта передним ходом задвижки 5 и 6 и шарниры 8 и 9 могут отсутствовать.
Кран 18 устанавливается в положение
И - Маслостанция 4 задействована. Открывают задвижку 2 и, управляя стволом гидромонитора 10 с помощью его пульта 12, производят гидроотбойку угля при «жестком телескопическом ставе 3. Жесткость ставу 3 придает запертая в камерах 30
гидрозамком 22 управляющая жидкость.
Используя эффективную длину струи, обрабатывают забой с наивысшей для данного гидромонитора 10 производительностью, затем перемещают его ставом 3
вперед на новый шаг. Величину шага выбирают исходя из достижения наивысшего эффекта от взаимодействия струи с массивом.
Для передвижки объекта вперед золотник 21 устанавливается в положение II,
при этом камеры 30-соединяются со сливом через дроссель 23, которым регулируется скорость раздвижки става. При тяжелом ставе, при малом давлении воды в ставе или других подобных ситуаций величина раздвигающей став силы может оказаться
недостаточной. В этих случаях золотник 19 переводится в положение II, чем создают в гидролинии 15 и камерах 29 давление управляющей жидкости, сила от которого суммируется с силой от воды в полости става.
Смещению воды и масла препятствуют уплотнения 28 между внутренним патрубком 26 и центральным 27.
По окончании передвижки объекта 10 на заданный шаг золотники 21 и 19 устанавливаются в положение I, уподобляя телескоп жесткому ставу.
Подвигание объекта 10 вперед производят шагами или непрерывно до полной раздвижки става 3, состоящего из водопроводящих гидроцилиндров 2, после чего став сокращается в сторону объекта 10. Для этого выполняются следующие операции.
Отсоединяют став 3 от задвижки. Устанавливают золотник 21 в положение III, а кран 18 - в положение II. Став 3 под действием давления управляющей жидкости в камерах 30 сокращается на свой полный ход в сторону объекта 10. При необходимости маслостанцию 4 можно механически соединить со ставом 3, а объект 10 дополнительно раскрепить в выработке.
Далее обычным путем наращивают водовод 1 на полный шаг сокращения става 3.
Работа несамоходного объекта задним ходом (фиг. 2). К началу работы став 3 раздвинут, в водоводе 1 существует давление воды, необходимое для производства гидроотбойки объектом ГО (гидромонитор). Золотник 21 находится в положении I, золотник 24 - в. положение III (задвижки 5 и 6 открыты), золотник 19 - в положении I, кран 18 - в положении I. При работе объекта задним ходом щарвиры 8 и 9 могут отсутствовать. Открывают задвижку и кран 18 устанавливается в положение II - маслостанция 4 задействована. Используя пульт 12, управляют стволом гидромонитора 10. При этом для отработки забоя используют эффективную длину струи, а отработку забоя ведут открытой заходкой, снимая полосу угля в отжатой зоне, т.е. в зоне наименьщего сопротивления угля разрушению струей. По погашении первой заходки перемещают объект 10 назад, сокращая став 3. Величина щага выбирается исходя из достижения наибольщего эффекта от взаимодействия струи с массивом. Для передвижки объекта 10 назад золотник 21 устанавливается в положение HI, при этом камеры 30 соединяются гидролинией 14 с линией нагнетания насоса 17. Клапан 20 поднастраивают на давление масла, обеспечивающее превыщение сокращающей став силы от давления масла на поясок над растягивающей (от воды). Внутренние патрубки 26 перемещаются в сторону водовода 1 относительно наружных 25 и центральных 27. После сокращения става 3 на заданный щаг золотник 21 устанавливается в положение I (став «жесткий), новую заходку отрабатывают струей воды. Подвигание объекта 10 назад производится описанным образом непрерывно или щагами до полного сокращения става 3, после чего раздвигают став в сторону водовода 1. Здесь может быть использовано несколько различных по своей сущности приемов. Прием первый. Отсоединяют от водовода 1 обычным путем участок труб, равный шагу раздвижки (сокращения) става 3. Задвижка мойтируется на свободном конце водовода Т,в который подают давление воды. Кран 18 устанавливается в положение II (маслостанция 4 задействована). Золотник 24 устанавливается в положение II (задвижки 5 и 6 закрываются). Золотник21 устанавливается в положение II (камеры 30 через гидролинию 14 и дроссель 23 соединены со сливом). Устанавливают кран 18 в положение III - став 3 заполняется водои, а затем раздвигается под действием давления воды в сторону водовода 1. При необходимости объект 10 раскрепляют заранее.
После соединения става 3 с задвижкой на водоводе 1 система готова к работе задним ходом на полный щаг сокращения става 3. Прием второй. Рассоединяют водовод 1 в точке последующей стыковки со ставом 3 и перемещают на щаг раздвижки става в сторону водовода лебедкой «поезд в составе: отсоединенный участок водовода. задвижка, став 3 с задвижками 5 и 6 и маслостанцией 4, объект 10. Отсоединяют участок водовода от «поезда, а став 3 соединяют с водоводом и обеспечивают в последнем давление воды, Кран 18 устанавливается в положение II (маслостанция задействована). Посредством золотника 24 (положение И) открывают задвижки 5 и б (под вариантом можно предусмотреть открытие только задвижки 5), открывают задвижку. Сообщают посредством золотника 21 (положение И) камеры 30 со сливом через дроссель 23. Став 3 раздвигается под действием воды в нем, перемещая вперед объект 10 в ту его позицию с которой было начато его перемещение назад лебедкой. Если давления воды в ставе недостаточно для раздвижки става с объектом 10, золотник 19 устанавливается в положение II, чем создают в гидролинии 15 и дополнительных камерах 29 давление масла, сила от которого на поясок суммируется с разжимающей силой от давления воды. По окончании раздвижки става система готова к эксплуатации. Работа самоходного объекта (фиг. 3). В водоводе 1 существует давление воды, необходимое для работы гидротурбинного привода объекта 11 (комбайн) и маслостанции 4. При работе комбайна открывают золотником 24 задвижки 5 и 6, золотник 21 устанавливается в положение III, а клапаном 20 поднастраивают давление масла в камерах 30 до получения примерного равенства сил, растягивающих и сжимающих став 3. Этим добиваются свободы перемещения патрубка 25, соединенного с патрубком 27, относительно патрубка 26 при наличии давления воды в ставе. Как и в известном /трубопроводе здесь универсальными концевыми щарнирами 8 и 9 может быть уподоблен «порожнему, не ограничивающему свободы перемещения объекта 11 своим ходом в пространстве. Комбайном 11 выполняют необходимый комплекс операций в забое, управляя им дистанционно с пульта 12 и регулируя состояние «порожний став с пульта 7.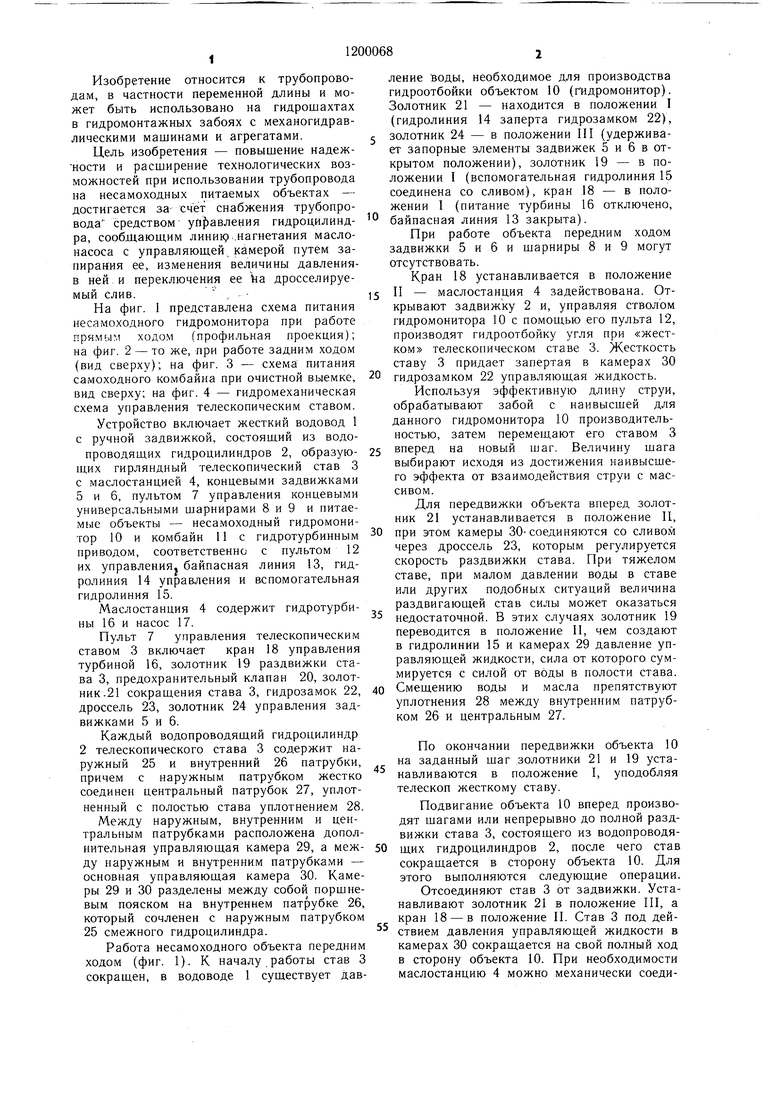
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМОНИТОРНАЯ УСТАНОВКА С ТРУБОПРОВОДОМ ПЕРЕМЕННОЙ ДЛИНЫ | 2010 |
|
RU2459075C1 |
| Исполнительный орган горнодобывающей машины | 1985 |
|
SU1314043A1 |
| Установка для расширения скважин | 1985 |
|
SU1273541A1 |
| Маслостанция для привода гидромонитора | 1983 |
|
SU1134761A1 |
| МЕХАНОГИДРАВЛИЧЕСКИЙ СНАРЯД ДЛЯ ПРОВЕДЕНИЯ ВОССТАЮЩИХ СКВАЖИН | 2008 |
|
RU2365756C1 |
| СПОСОБ УДЕРЖАНИЯ ПРОХОДЧЕСКОЙ МАШИНЫ В ЗАДАННОМ ПОЛОЖЕНИИ | 2004 |
|
RU2276728C1 |
| Маслостанция для привода гидромонитора | 1979 |
|
SU989126A1 |
| Система управления гидромонитором | 1990 |
|
SU1744257A1 |
| Способ приготовления пульпы для гидротранспорта и устройство для его осуществления | 1986 |
|
SU1411475A1 |
| Система управления гидромонитором | 1989 |
|
SU1700250A1 |
1. ТРУБОПРОВОД ПЕРЕМЕННОЙ ДЛИНЫ преимущественно для питания водой, содержащей твердые примеси, объектов, управляемых от маслонасоса с гидротурбиной, соединенной с жестким водоводом и содержащей гидроцилиндр, выполненный в виде подвижных в осевом направлении друг относительно друга внутреннего и наружного патрубков, между которыми образована управляющая камера, ограниченная поршневым пояском на внутреннем патрубке, причем гидротурбина соединена гидравлически с каналом подвода воды к питаемому объекту, при этом в канале установлены задвижки, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей при использовании трубопровода на несамоходных питаемых объектах, ..,.. -ftv. /3 L ftr.r объектах, он снабжен средством управления гидроцилиндром, сообщающим линию нагнетания маслонасоса с управляющей камерой с возможностью запирания этой Камеры, изменения величины давления в ней и переключения ее на дросселируемый слив, при этом между жестким водоводом и маслонасосом последовательно установлены ручная и первая концевая задвижки, а между гидроцилиндром и питаемым объектом - вторая концевая задвижка, причем полость между жестким водоводом и ручной задвижкой через средство управления гидроцилиндром гидравлически соединена с полостью трубопровода между первой и второй концевыми задвижками, а гидравлическое соединение гидротурбины с каналом под- ( вода воды выполнено через указанное средство, при этом все задвижки установлены с (Л возможностью их одновременного запирания при наличии гидравлической связи гидротурбины с полостью между жестким водоводом и ручной задвижкой. 2. Трубопровод по п. 1, отличающийся тем, что в гидроцилиндре выполнена дополнительная управляющая камера, разделенto ная с основной управляющей камерой поршневым пояском на внутреннем патрубке, при этом дополнительная управляющая камера соединена с линией нагнетания маслонасоса с возможностью переключения этой Од камеры на слив. 00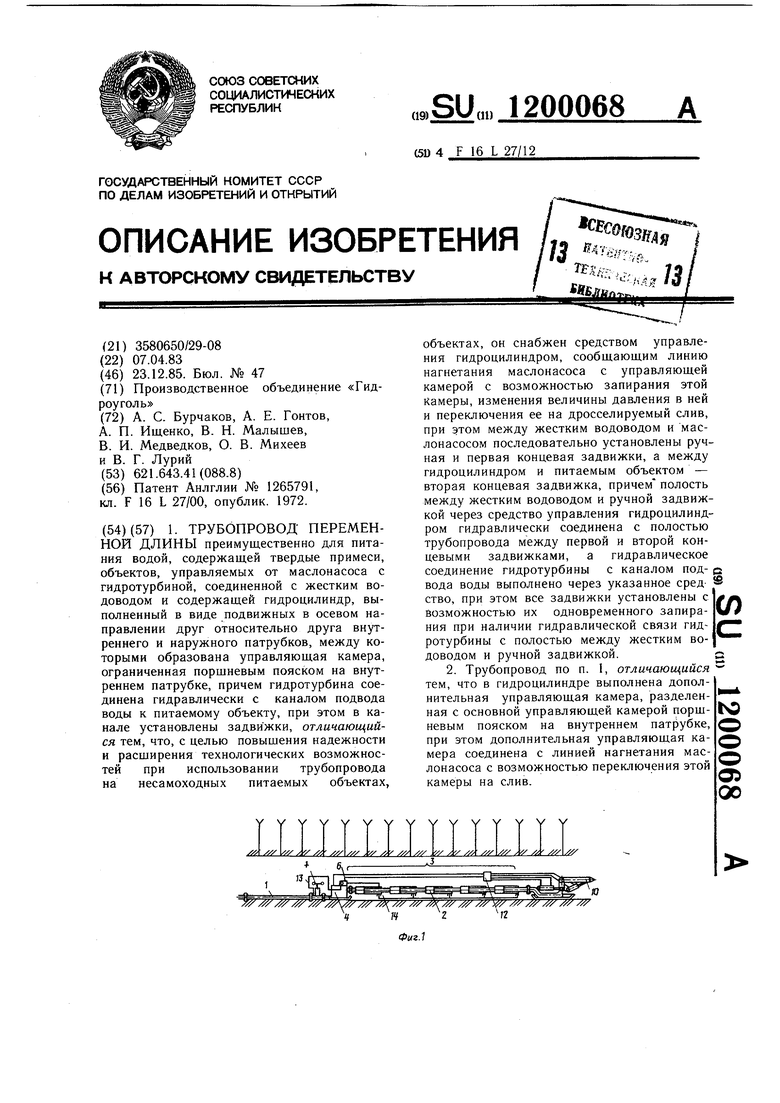
| Устройство для моделирования систем массового обслуживания | 1984 |
|
SU1265791A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
