Для указания курса морских судов и самолетов применяют гироскопические устройства, работающие ио выбору в режиме гирокомпаса, ГИJ рополукомпаса или гиромагнитного компаса и содержащие сферический гиромотор, следяицю гиросферу, внешний кардановый подвес с корректирующим маятником, сервомеханизмы автоматического управления и передачи показаний, а также счетно-решающее устройство для компенсации скоростных и баллистических девиаций и переносных скоростей.
Однако в известных устройствах подобного рода не обеспечивается достаточно эффективное гашение свободных колебаний гироскопа.
Для устранения указанного недостатка предлагается корректирующий маятник электрически связать с сервоприводом вертикальной оси гироскопа.
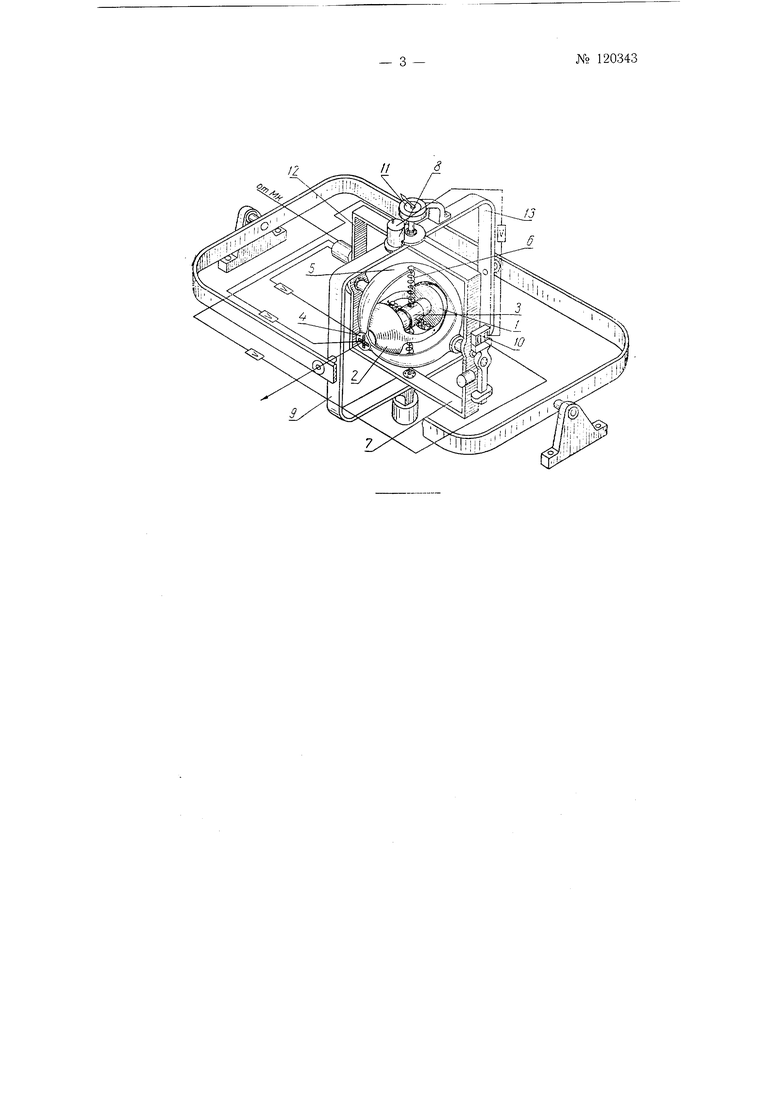
На чертеже изображена принципиальная схема предлагаемого устройства.
Устройство содержит трехфазный синхронный гиромотор 1, выполненный в виде двух роторов, закрепленных на общей оси. В качестве кожуха гироротора используется гиросфера 2, несущая на себе карданное кольцо 3 и сердечники двух одноплоскостных индукционных датчиков 4.
Наружной рамкой гироскопа огужит следящая сфера 5, на которой укреплены две статорные обмотки датчиков 4 и пружины 6, связывающие ее с гиросферой 2. Передача усилия пружин 6 ротору гироскопа осущест-вляется с помощью карданного кольца 3. С целью упрощения конструкции гироскопического устройства центрирующие усилия и моменты передаются на гироскоп через одни и те же пружины 6.
Пространство между гиросферой и следящей сферой заполняется тяжелой жидкостью (т 1,8 -г 2), которая, вследствие болыного удель№ 120343
ного веса, компенсирует влияние веса следящей сферы на центрирующие пружины 6На внешнем карданном подвесе 7 установлены сервомеханизмы 8 для автоматического управления и корректирующий маятник 9, представляющий собой одноплоскостной жидкостный переключатель с зоной пропорциональности.
Измерение сопротивления токопроводящей жидкости маятника при его наклоне служит мерой отклонения гиросферы от горизонта. Для более эффективного гащения свободных колебаний гироскопа рассогласование маятникового груза с гиросферой регистрируется индукционным датчико.м 10 и после предварительного усиления, посылается на сервомеханический привод вертикальной оси гироскопа.
Указатели курса управляются посредством сельсина-датчика //. Ротор его закреплен с осью азимутальной рамки 12, а обмотки статора на внутренней рамке 13 внещнего кардана. Эти обмотки электрически соединены с соответствующими обмотками сельсина-приемника.
Для обеспечения компенсации скоростных и баллистических девиаций гироскопа и переносных скоростей гирополукомпаса используется счетно-решающее устройство (не показано на чертеже).
Пред.мет изобретения
1.Гироскопическое устройство для указания курса морских судов и самолетов, работающее по выбору в режиме гирокомпаса, гирополукомпаса или гиромагнитного компаса, содержащее сферический гиромотор, следящую гиросферу, внешний карданный подвес с корректирующим маятником, сервомеханизмы автоматического управления и передачи показаний, а также счетно-решающее устройство для компенсации скоростных и баллистических девиаций и переносных скоростей, отличающееся тем, что, с целью гашения свободных колебаний гироскопа, корректирующий маятник электрически связан с сервоприводом вертикальной оси гироскопа.
2.Гироскопическое устройство по п. 1, отличающееся тем, что, с целью упрощения конструкции, пружины, связывающие шаровой гиромотор со следящей сферой, одновременно использованы для передачи на гироскоп центрирующих усилий и .моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |