Изобретение относится к области морского навигационного приборостроения и может быть использовано в современных морских гироскопических компасах с автономным, плавающим в жидкости чувствительным элементом.
Представителем группы двухгироскопных аналогов может служить автономный поплавковый чувствительный элемент отечественного гирокомпаса "Курс-4". ["Технические средства судовождения". Конструкция и эксплуатация. Воронов В. В., Перфильев В.К., Яловенко А.В.- М.: Транспорт, 1988, с. 335]
Чувствительный элемент этого аналога выполнен в виде сферы, которая полностью погружена в токопроводящую маловязкую поддерживающую жидкость и плавает в ней. Внутри сферы установлены два гиромотора, связанные между собой кинематической связью типа "антипараллелограмм", обеспечивающей гиромоторам движение вокруг их вертикальных осей на равные углы и в противоположные стороны. Кроме того, внутри гиросферы размещены сосуды гидравлического успокоителя колебаний, заполненные высоковязкой жидкостью и снабженные реле выключателя затухания, а также центрирующая электромагнитная катушка. Общий центр массы гиросферы смещен вниз по вертикальной оси гиросферы, что и обеспечивает ей свойство избирательности по отношению к плоскости истинного меридиана. На наружной поверхности гиросферы размещена группа электродов, с помощью которых внутрь гиросферы подводится электрическое питание.
Основным недостатком аналога является использование технологически сложного двухгироскопного гироблока, включающего сложные и высокоточные направляющиеся вращения гиромоторов вокруг их вертикальных осей, а также сложную кинематическую связь типа "антипараллелограмм". Другим недостатком является нестабильный по своим характеристикам гидравлический успокоитель колебаний чувствительного элемента. Результатом всего сказанного является высокая стоимость и недостаточная надежность чувствительного элемента аналога.
Представителем группы одногироскопных аналогов является чувствительный элемент гирокомпаса SR-220 фирмы Sperry Rand (патент США 4.451.990).
Чувствительный элемент аналога выполнен в виде герметичной сферы, полностью погруженной в высоковязкую силиконовую непроводяющую жидкость. Внутри гиросферы расположен один жестко связанный с ней гироскоп. Главная ось гироскопа горизонтальна и определяет линию N-S гиросферы. При рабочей температуре, поддерживающей жидкости, гиросфера обладает отрицательной плавучестью. Центр массы гиросферы совмещен с ее геометрическим центром. Удержание гиросферы в заданном положении по высоте относительно следящей сферы обеспечивается благодаря применению вертикального торсиона, нижний конец которого закреплен на вертикальной оси гиросферы на некотором расстоянии выше ее геометрического центра, а верхний конец - на следящей сфере. Несовпадение центра массы гиросферы с точкой задела нижнего конца торсиона обеспечивает появление положительного маятникового момента при возникновении угла подъема оси N-S гиросферы над плоскостью горизонта.
Сочетание указанного торсионного подвеса с размещением гиросферы в высоковязкой жидкости обеспечивает эффективное уменьшение погрешности прибора в условиях качки судна.
В северной и южной частях гиросферы размещены статоры двух двухкоординатных датчиков угла, которые необходимы для функционирования двухкоординатной следящей системы гироблока, причем функционирование второго горизонтного канала следящей системы обеспечивает наличие затухающих колебаний гиросферы.
Основным недостатком одногироскопного аналога заявляемого изобретения является то, что использование чувствительного элемента (гиросферы) с указанным торисионным подвесом возможно лишь при надлежащем функционировании высокоточной быстродействующей двухканальной (а следовательно, и дорогостоящей) следящей системы. При отказе любого канала следящей системы чувствительный элемент неизбежно теряет компасные свойства. Поэтому упрощение конструкции чувствительного элемента по сравнению с двухгироскопным аналогом не привело ни к повышению надежности, ни к снижению стоимости гирокомпаса в целом.
Ближайшим прототипом является автономный поплавковый двухгироскопный чувствительный элемент гирокомпаса "Амур-3". ["Технические средства судовождения" Дмитриев В.И. и др.- М.: "Транспорт", 1990, 280.]
Чувствительный элемент прототипа выполнен в виде герметичной сферы, полностью погруженной в токопроводящую маловязкую поддерживающую жидкость, имеющей отрицательную плавучесть при рабочей температуре.
Внутри гиросферы укреплены два гиромотора, оси фигур которых расположены горизонтально и симметрично, под углом 45o относительности N-S гиросферы. Каждый из гиромоторов так установлен в опорах вращения, что может поворачиваться вокруг своей вертикальной оси относительно корпуса гиросферы. Идентичность движения обоих гиромоторов в противоположные стороны определяется упругой кинематической связью типа "антипараллелограмм". Применение указанной двухгироскопной системы обеспечивает высокую точность функционирования чувствительного элемента в условиях качки судна.
Центр тяжести гиросферы расположен на ее вертикальной оси ниже герметического центра.
Для погашения колебаний гиросферы в азимуте и по высоте применен гидравлический успокоитель (сообщающиеся сосуды), ориентированные в направлении оси N-S и частично заполненные вязкой жидкостью.
Центрирование чувствительного элемента относительно следящей сферы осуществляется двумя катушками электромагнитного дутья и ртутной подушкой, размещенной внутри следящей сферы. Подвод электропитания током ко всем элементам внутри сферы производится через поддерживающую токопроводящую жидкость с помощью полярных и экваториальных электродов.
Основной недостаток двухгироскопного поплавкового чувствительного элемента гирокомпаса, являющегося прототипом заявляемого изобретения, заключается в применении технологически сложного, дорогостоящего и недостаточно надежного двухгироскопного гироблока, включающего в себя два гиромотора, каждый из которых установлен по вертикальной оси в высокоточных направляющих вращения, и связанных между собой сложной кинематической связью типа "антипараллелограмм" с упругой связью.
Кроме того, применяемый в прототипе гидравлический успокоитель колебаний обладает существенным недостатком, состоящим в том, что технологически достаточно сложно обеспечить заданное (стандартное) значение такой его важнейшей характеристики, как постоянная времени.
Сущность изобретения.
Основная задача, на решение которой направлено заявляемое изобретение, состоит в повышении надежности и безопасности судовождения.
Технический результат, который может быть получен при осуществлении изобретения, выражается в упрощении конструкции чувствительного элемента гирокомпаса без понижения точности и повышение на этой основе его надежности при одновременном снижении стоимости.
К существенным признакам заявляемого автономного поплавкового чувствительного элемента гирокомпаса относятся
- тонкостенная металлическая герметичная с электроизоляционным покрытием сферическая оболочка;
- две центрирующие электромагнитные катушки, установленные внутри этой оболочки;
- экваториальные графитовые электроды, выполненные в виде полупоясов, и полярные графитовые электроды, выполненные в форме сегментов, размещенные на наружной поверхности оболочки.
К признакам, отличительным от наиболее близкого аналога, относятся
- один гиромотор, установленный внутри сферической оболочки и жестко укрепленный в плоскости ее экватора, ось вращения которого определяет направления оси N-S чувствительного элемента;
- плоский физический маятник, выполняющий силовую функцию, также размещен внутри сферы;
- статорные обмотки электромагнитного датчика момента, прикрепленные к внутренней поверхности оболочки;
- ограничительный стержень (тонкий, неметаллический), установленный в наружной пробке, закрывающей верхнюю буксу;
- дополнительная масса, смещающая общий центр массы чувствительного элемента в плоскости, перпендикулярной оси N-S этого элемента, из его геометрического центра по направлению вниз и к западу.
На фиг. 1 представлены
1, а - вертикальный разрез чувствительного элемента гирокомпаса (вид с E);
1, б - вертикальный разрез чувствительного элемента гирокомпаса (вид с S) (физический маятник разрезан по сечению Б-Б, а оболочка гиросферы - по сечению А-А).
На фиг. 2 представлен график прихода чувствительного элемента гирокомпаса в меридиан ( ϕ = 0o).
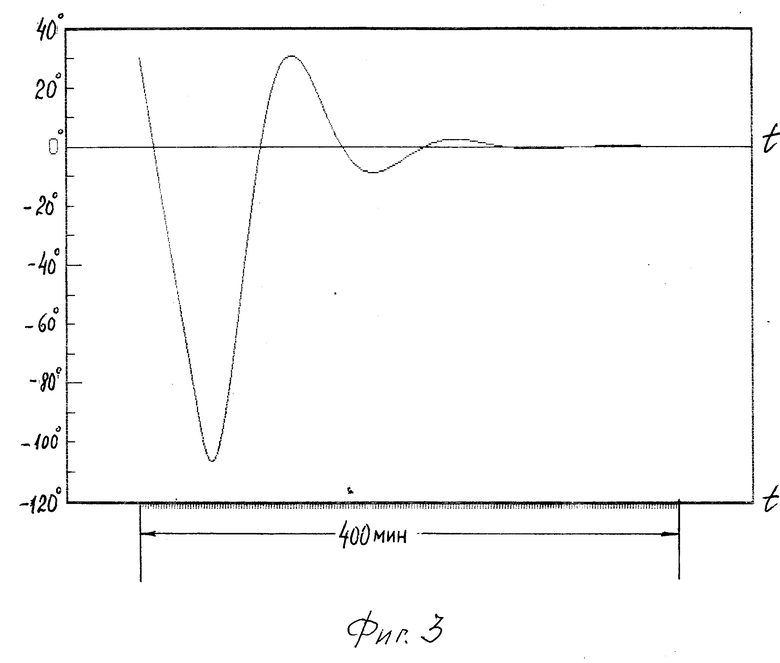
На фиг. 3 представлен график прихода чувствительного элемента гирокомпаса в меридиан ( ϕ = 70o).
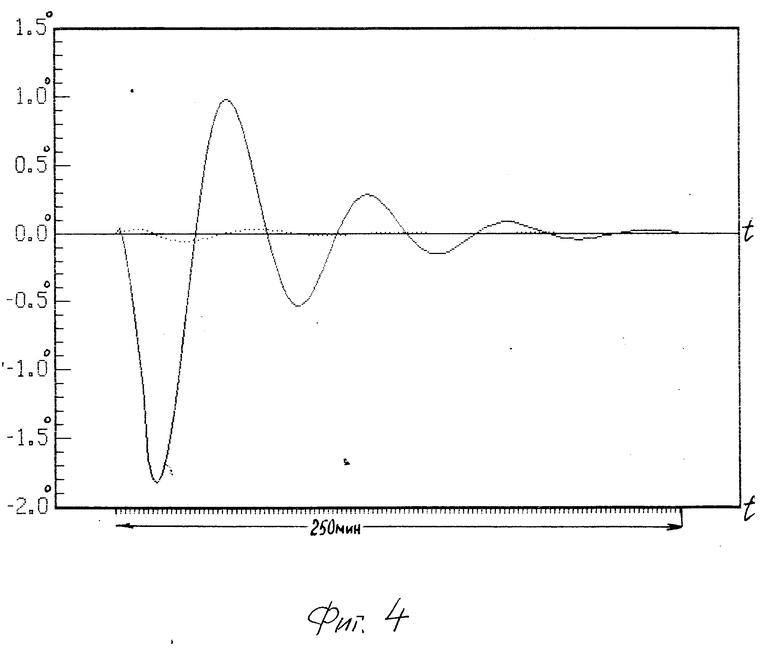
На фиг. 4 представлен график инерционной девиации чувствительного элемента гирокомпаса ( ϕ = 0o).
На фиг. 5 представлен график инерционной девиации чувствительного элемента гирокомпаса ( ϕ = 70o).
На фиг. 6 представлен график девиации чувствительного элемента гирокомпаса под воздействием качки судна.
Сведения, подтверждающие возможность осуществления изобретения.
Чувствительный элемент (гиросфера), изображенный на фиг. 1, представляет собой герметическую оболочку 1 сферической формы. Внутри гиросферы размещен один гиромотор 2, жестко связанный с оболочкой. При этом главная ось ротора гиромотора располагается в плоскости экватора гиросферы и определяет направление ее оси N-S. Вектор кинетического момента ротора направлен к S.
Гиросфера полностью погружена в маловязкую токопроводящую поддерживающую жидкость 3 и плавает в ней. При нормальной (рабочей) температуре гиросфера имеет нулевую плавучесть.
Снаружи вдоль экватора гиросферы расположены экваториальный электрод, включающий в себя широкий полупояс 4 и две пары 5 узких полупоясов. Упомянутые пояса, изготовленные из графито-эбонита, крепятся непосредственно к оболочке гиросферы, поэтому электрически связаны между собой.
С помощью проводников, прикрепленных к внутренней поверхности оболочки, подается одна из фаз трехфазного тока на все находящиеся в гиросфере электроэлементы.
Также снаружи к оболочке гиросферы прикреплены два полярных электрода 6 и 7, изолированных от нее.
Две другие фазы трехфазного тока подаются на все электроэлементы гиросферы проводниками от букс 8 и 9, электрически соединенных с полярными электродами 6 и 7. Против перечисленных электродов гиросферы на следящей сфере 10 укреплены полярные 11 и 12 и экваториальный 13 электроды, к которым электрическое питание подводится извне.
Для центрирования гиросферы в вертикальном направлении в условиях изменяющейся (в определенных пределах) температуры поддерживающей жидкости, а также для центрирования ее в горизонтальной плоскости при действии горизонтальных сил инерции в верхней и нижней частях гиросферы горизонтально установлены две центрирующие электромагнитные катушки 14 и 15.
В чувствительном элементе также расположен герметичный корпус 16 силового физического маятника. Указанный маятник представляет собой рабочее тело (массу) 17, подвешенную на двух плоских параллельных упругих металлических лентах 18 и 19, обеспечивающих рабочему телу плоско-параллельное движение вдоль оси N-S чувствительного элемента. Ось чувствительности физического маятника совпадает по направлению с осью N-S чувствительного элемента.
Внутреннее пространство корпуса, в котором расположен маятник, залито высоковязкой жидкостью 20. Движение рабочего тела по отношению к корпусу возможно лишь в пределах ограничителей 21, укрепленных в стенках корпуса.
При горизонтальном положении оси N-S гиросферы центр массы рабочего тела находится на упомянутой оси гиросферы.
Кроме того, внутри чувствительного элемента размещены статорные обмотки 22, 23, 24, 25 электромагнитного датчика момента, ротором которого служит алюминиевая следящая сфера 10.
Указанные статорные обмотки прикреплены к оболочке гиросферы и располагаются в плоскости, перпендикулярной оси N-S гиросферы и проходящей через ее геометрический центр.
Общий центр массы гиросферы со всеми установленными внутри ее устройствами при горизонтальном положении оси N-S гиросферы совпадают с ее геометрическим центром.
К оболочке гиросферы, внутри ее, в плоскости, перпендикулярной оси N-S гиросферы и проходящей через ее геометрический центр, укреплена дополнительная масса 26, смещающая общий центр массы гиросферы по направлению вниз и к западу из ее геометрического центра.
Снаружи гиросферы в центре пробки 27, закрывающей буксу 8 верхнего полярного электрода вдоль радиуса гиросферы жестко заделан тонкий неметаллический ограничительный стержень-ограничитель 28. Наружный конец этого стержня входит в нишу 29, сделанную в верхней чаше следящей сферы.
Длина стержня должна быть не менее двойной величины зазора между гиросферой и следящей сферой по высоте.
Возможность осуществления чувствительного элемента в соответствии с заявляемым его устройством подтверждается тем фактом, что все элементы конструкции, упомянутые в приведенном выше описании, известны в технике и существуют в промышленном исполнении.
Ниже приводятся результаты математического анализа, подтверждающие не только возможность реализации заявляемого чувствительного элемента гирокомпаса, но и соответствие его характеристик требованиям ИМО в типичных для мореплавания ситуациях.
Система дифференциальных уравнений, отображающая в линейном приближении поведение чувствительного элемента гирокомпаса, получена в следующем виде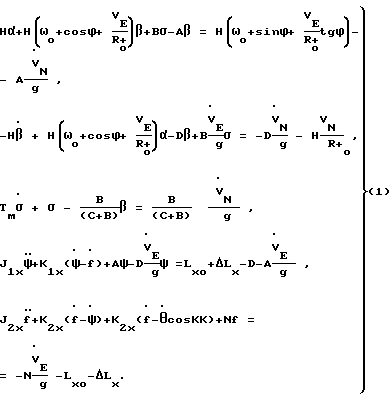
В системе дифференциальных уравнений (1) использованы следующие обозначения:
H - кинетический момент ротора гиромотора;
B - модуль момента основного силового маятника (отрицательного твердого маятника);
C - модуль момента упругого подвеса силового маятника;
A - модуль момента дополнительного твердого положительного маятника;
D - модуль демпфирующего момента,
причем
A = mgr cos ψo,
D = mgr sin ψo,
где
m - величина дополнительной массы (положительный твердый маятник).
r,ψo - параметры (полярные координаты), характеризующие положение центра дополнительной массы, лежащего в плоскости, перпендикулярной оси N-S;
Tм - постоянная времени основного силового маятника;
Lxo - модуль момента электромагнитного датчика момента;
причем Lxo = D;
Δ Lx - вариация модуля электромагнитного момента, возникающие вследствие колебаний напряжения источника питания датчика момента, а также в результате других физических причин;
J1x - момент инерции чувствительного элемента относительного его оси N-S;
K1x - коэффициент момента вязкого трения вокруг оси N-S в подвесе чувствительного элемента;
J2x - момент инерции всех подвижных частей контейнера, внутри которого расположен чувствительный элемент (котел + жидкость + следящая сфера);
K2x - коэффициент момента вязкого трения в подвесе контейнера;
N - модуль положительного маятникового момента контейнера; угловая скорость бортовой качки судна;
угловая скорость бортовой качки судна;
KK - компасный курс судна; соответственно составляющие вдоль осей N-S и E-W линейной скорости и линейного ускорения точки судна, совпадающей с центром подвеса чувствительного элемента;
соответственно составляющие вдоль осей N-S и E-W линейной скорости и линейного ускорения точки судна, совпадающей с центром подвеса чувствительного элемента;
g - ускорение силы тяжести; угловая скорость суточного вращения Земли;
угловая скорость суточного вращения Земли;
Rt - радиус Земли, принятой за шар;
ϕ - широта места судна;
α,β - углы, характеризующие отклонения оси N-S чувствительного элемента относительно плоскостей истинного меридиана и истинного горизонта;
ψ - угол крена чувствительного элемента вокруг оси N-S чувствительного элемента по отношению к линии истинной вертикали;
σ - угол, характеризующий линейное смещение массы рабочего тела силового маятника в плоско-параллельном движении относительно его невозмущенного положения при горизонтальном положении оси N-S;
f - угол крена контейнера вокруг оси N-S гиросферы по отношению к линии истинной вертикали.
В соответствии с системой дифференциальных уравнений (1) действие (работа) заявляемого чувствительного элемента с принципиальных позиций адекватно действию любого существующего чувствительного элемента гирокомпаса, обладающего отрицательным маятникообразным эффектом, обеспечивающим возникновение свойства избирательности по отношению к плоскости истинного меридиана. Отличительная особенность заявляемого чувствительного элемента состоит в том, что указанный отрицательный маятникообразный эффект достигается в свободно плавающем чувствительном элементе на основе силового маятника, который упруго подвешен и движение которого сильно задемпфировано (т.е. происходит с запаздыванием, характеризуемым величиной Tм по сравнению с движением чувствительного элемента по соответствующей координате).
Такое свойство маятника позволяет реализовать другую отличительную особенность заявляемого чувствительного элемента, сделав его одногироскопным, обеспечить высокую точность функционирования в условиях качки судна. Ранее отрицательные твердые маятники, выполняющие функцию момента непосредственного управления, не встречались. Свободно плавающий чувствительный элемент, обладающий отрицательным маятникообразным эффектом вокруг оси E-W в статическом состоянии (т.е. при невращающемся роторе гиромотора) является неустойчивым по отношению к указанной оси и по этой причине перед запуском электроды гиросферы и соответствующие электроды следящей сферы могут разойтись на любые углы (вплоть до 180o), что исключило бы возможность подачи питания внутрь гиросферы. Во избежание этого в заявляемом чувствительном элементе в пробке верхнего полярного электрода закреплен стержень, который при любом возможном положении гиросферы по высоте в статическом состоянии не позволит гиросфере откло6ниться за пределы угла, определяемого нишей, сделанной на следующей сфере в районе ее верхнего полярного электрода. Величина указанного угла определяется из условия отсутствия касания стержня о кромки ниши при любой реально возможной качки судна (в соответствии с требованиями ИМО).
Cпособ затухания колебаний чувствительного элемента принципиальных позиций достигается так же, как у всех известных компасов с вертикальным демпфирующим моментом. В заявляемом чувствительном элементе такой момент возникает в результате смещения центра массы чувствительного элемента к западу, создаваемого с помощью дополнительной массы. Отличительная особенность заявляемого чувствительного элемента заключается в том, что такой способ применен для свободного плавающего чувствительного элемента, что оказалось реализуемым только на основе компенсации составляющей момента силы тяжести, создаваемого дополнительной массой вокруг оси N-S чувствительного элемента, что достигается с помощью датчика электромагнитного момента. Элементом новизны является также тот факт, что смещение центра массы чувствительного элемента создается не только к западу, но и вниз, т.е. под углом ψo к оси Z-Z гиросферы, чем обеспечивается устойчивое состояние чувствительного элемента относительно его оси N-S в рабочем состоянии в условиях возможных вариаций как момента, создаваемого дополнительной массой, так и компенсирующего электромагнитного момента.
Таковы принципиальные положения, подтверждающие работоспособность заявляемого чувствительного элемента.
Подтверждением возможности осуществления заявляемого чувствительного элемента также являются выполненные аналитическое исследование и математическое моделирование путем численного интегрирования системы дифференциальных уравнений на ЭВМ.
Следующие полученные результаты характеризуют поведение заявляемого чувствительного элемента гирокомпаса во всех основных условиях его функционирования.
1. Приход чувствительного элемента гирокомпаса в меридиан при произвольных начальных условиях отображается графиками, полученными при решении системы дифференциальных уравнений (1) и приведенными на фиг. 2 (для ϕ = 0o) и фиг. 3 (для ϕ = 70o). Из рассмотрения графиков вытекает, что чувствительный элемент по данному признаку отвечает требованиям ИМО - время установления в положение равновесия не превышает 6 ч.
2. Координаты положения равновесия по углу α определяются следующим выражением, полученном аналитическим путем
Из выражения (2) вытекает, что заявляемому чувствительному элементу гирокомпаса при стационарном движении судна присущи известные скоростная и широтная девиации, которые либо учитываются аналитически (как поправка гирокомпаса), либо исключаются из показаний с помощью корректоров известных конструкций;
3. Влияние маневрирования судна отображается графиками, полученными при решении системы дифференциальных уравнений (1) и приведенными на фиг. 4 ( ϕ = 0o) и фиг. 5 ( ϕ = 70o).
Графики получены для стандартного маневра ИМО - ΔV = 20 узл. для наихудшего случая, когда KK = 0o.
Максимальные значения инерционных девиаций, как это вытекает из рассмотрения указанных графиков, не превышают требований ИМО, т.е. не превосходят величины ±2,0o;
4. Влияние качки судна на точность гирокомпаса отображается графиком, приведенным на фиг. 6 и являющимся результатом решения на ЭВМ системы дифференциальных уравнений (1) для амплитудного ускорения, равного 100 смс-2 (требование ИМО), при KK = 45o (наихудший случай) и при различных значениях периода качки судна Tк в пределах 6 - 24 с. Из анализа графика, рассчитанного для ϕ = 0o, вытекает, что в диапазоне значений периода Tк = 6 oC 15 с, охватываемого требованиями ИМО, девиация на качке σк заявляемого чувствительного элемента гирокомпаса не превосходит допустимого значения в соответствии с требованиями ИМО - ±1o sec ϕ, т.е. ±1o для ϕ = 0o. Аналитические исследования показали, что девиация на качке заявляемого чувствительного элемента пропорциональна функции secϕ и значит требования ИМО выполняются во всем диапазоне широт, который регламентирован ИМО.
Из всего изложенного выше вытекает главный вывод, состоящий в том, что при сохранении всех основных достоинств и точностных характеристик (в пределах требований ИМО), присущих автономным гироскопическим чувствительным элементам поплавкового типа, в заявляемом чувствительном элементе гирокомпаса достигнуто значительное упрощение конструкции, состоящее в том, что вместо сложной двухгироскопной системы, формирующей гироблок, обеспечивающий достаточное высокую точность показаний в условиях качки судна, предложен предельно простой одногироскопный блок, а высокая точность в условиях качки достигается применением отрицательного плоского, сильно демпфированного, физического маятника, осуществляющего непосредственное управление движением чувствительного элемента.
Другим серьезным упрощением является замена системы сообщающихся сосудов, заполненных вязкой жидкостью (гидравлический успокоитель колебаний) на простое устройство, включающее в себя небольшую дополнительную массу и электромагнитный датчик момента, жестко соединенные с корпусом чувствительного элемента (гиросферой).
Иначе говоря, в заявляемом чувствительном элементе сведено до минимума количество подвижных элементов и упрощен до предела характер их движения (одна собственная степень свободы вращения ротора гиромотора и одна собственная степень свободы движения физического маятника).
В результате достигнутого упрощения конструкции заявляемого чувствительного элемента при сохранении точностных характеристик значительно повышается его надежность и существенно снижается стоимость по сравнению с известными аналогами и прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Чувствительный элемент поплавкового гирокомпаса | 1990 |
|
SU1810762A1 |
| Устройство для измерения углов бортовой и килевой качки судна | 1986 |
|
SU1434254A1 |
| СПОСОБ КРЕПЛЕНИЯ ШТАБЕЛЯ ТРУБ | 1989 |
|
RU2028247C1 |
| Гирокомпас с однофазным питанием гиромоторов | 1977 |
|
SU698379A1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2146635C1 |
| СПОСОБ УМЕНЬШЕНИЯ АМПЛИТУДЫ ПРЕЦЕССИОННЫХ КОЛЕБАНИЙ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИРОКОМПАСА | 1988 |
|
RU2025663C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| СИСТЕМА ПОДГОТОВКИ И ПОДАЧИ ВОДОТОПЛИВНОЙ ЭМУЛЬСИИ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 1996 |
|
RU2135897C1 |



Чувствительный элемент содержит герметичную сферическую оболочку, полностью погруженную в поддерживающую токопроводящую жидкость. На оболочке размещены три электрода, обеспечивающие подвод электроэнергии. Внутри оболочки размещены две катушки электромагнитного центрирующего устройства. Внутри оболочки размещен один гиромотор, жестко связанный с оболочкой, и плоской физический маятник на упругом подвесе в виде двух плоских параллельных пластин. Маятник находится в герметичной камере, заполненной высоковязкой жидкостью. Движение маятника лимитируется двумя ограничителями. К внутренней части оболочки прикреплены статорные обмотки электромагнитного датчика момента и дополнительная масса, смещающая центр массы чувствительного элемента из его геометрического центра вниз и к западу. На оболочке укреплен тонкий неметаллический стержень-ограничитель, входящий свободным концом в нишу следящей сферы. Обеспечивается повышение надежности гирокомпаса, упрощение конструкции и снижение его стоимости. 6 ил.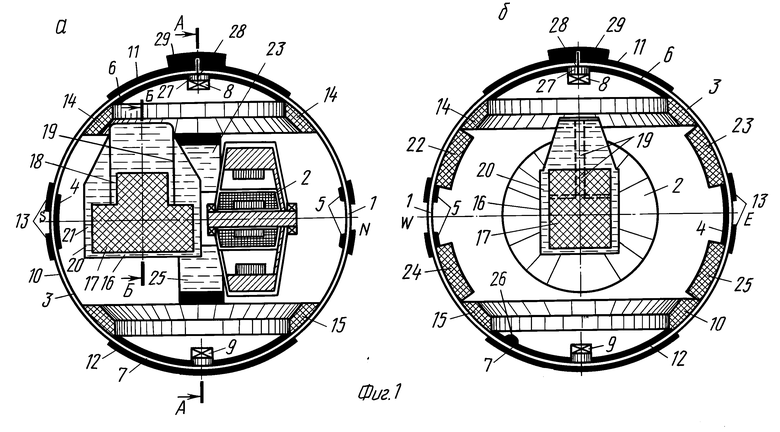
Автономный поплавковый чувствительный элемент гирокомпаса, содержащий гиросферу, выполненную в виде герметичной металлической с электроизоляционным покрытием тонкостенной сферической оболочки, на наружной поверхности которой расположены экваториальные графитовые электроды в виде полупоясов и полярные графитовые электроды в виде сегментов, внутри гиросферы размещены гиромотор и две центрирующие катушки, и следящую сферу, внутри которой размещена гиросфера, погруженная в жидкость, причем на следящей сфере закреплены полярные и экваториальные электроды, расположенные напротив соответствующих электродов гиросферы, отличающийся тем, что дополнительно внутри гиросферы размещены герметичный корпус, в котором установлен плоский физический маятник и ограничители, а внутреннее пространство заполнено высоковязкой жидкостью, дополнительная масса, статорные обмотки электромагнитного датчика момента, ротором которого является следующая сфера, выполненная из алюминия, гиромотор жестко закреплен в плоскости экватора гиросферы, причем ось собственного вращения ротора гиромотора определяет направление оси N-S чувствительного элемента гирокомпаса, а вектор кинетического момента направлен к S, плоский физический маятник выполнен в виде массы на упругом подвесе, ось чувствительности физического магнита совпадает с направлением оси N-S чувствительного элемента гирокомпаса, а центр массы находится на оси N-S при его горизонтальном положении, дополнительная масса закреплена в плоскости, перпендикулярной оси N-S, проходит через геометрический центр гиросферы и обеспечивает смещение центра массы чувствительного элемента гирокомпаса относительно геометрического центра по направлению вниз и к западу, статорные обмотки электромагнитного датчика момента закреплены в плоскости, перпендикулярной оси ротора гиромотора, снаружи гиросфера снабжена тонким неметаллическим стержнем-ограничителем, расположенным вдоль ее вертикальной оси и жестко закрепленным в пробке, закрывающей буксу верхнего полярного электрода, а в области верхнего полярного электрода следящей сферы выполнена ниша, в которой размещен наружный конец стержня-ограничителя, имеющего длину не менее удвоенной величины зазора между гиросферой и следящей сферой.
| Блинов И.А | |||
| и др | |||
| Электронавигационные приборы.-М.: Транспорт, 1980, с.302 | |||
| Кошляков В.Н | |||
| Теория гироскопических компасов.-М.: Наука, 1972, с.13 | |||
| Технические средства судовождения/ Под ред | |||
| О.Г | |||
| Каратаева.-М.: Транспорт, 1990, с.89, 49-50, 122-123 | |||
| Способ обнаружения паразитных составляющих в спектре сигнала генератора | 1990 |
|
SU1810764A1 |
| US 4451990A, 05.06.84 | |||
| US 4530164A, 23.07.85. | |||
