Предлагаемое у,:тройство относится к известному тмпу устройств, так называемых операторов, предназначенных для автоматнческого управления агрегатами гидроэлектростанции.
В авт. св. ЛЬ 99359 М. Д. Кучкина и Ю- И. Полова описан оператор, содержащий датчики напора и мощности ГЭС, контактные полосы пуска и остановки агрегатов, выполненные по форме характеристик MOUJ,HOсти ГЭС ПО напору, и подвн/кный контакт, управляющий подключенными к указанным полосам исполнительными реле пуска и Счстаиовки агрегатов и перемещаемый дифференциалом по рабочему иолю иолос в вертикальном направлеиин в зависимости от напора ГЭС и в горизонтальном - в зависимости от ее мощности.
В предлагаемом устройстве того же целевого назначения, представляющем собой видоизменение устройства, описанного в авт. св. №99359, отсутствует измерительный элемент действительной мощности гидроэлектростанции, что упрощает схему устройства. Для возможности индивидуальной настройки иараметров пуска и остановки каждого из гидроагрегатов (или каждой группы гидроагрегатов), при выборе оптимального числа работающих агрегатов при даииом напоре и мощности гидростанции, вместо коитактных полос пуска и остановки гидроагрегатов применены релейные элементы (ячейки) по числу гидроагрегатов станции. Эти релейные элементы выполнены на магнитиых усилителях, работающих в релейном режиме, и подключены к потенциал-регулятору входного блока, представляющего собой следящую систему с магнитными усилителями, управляющими двигателем указанного иотеициал-регулятора.
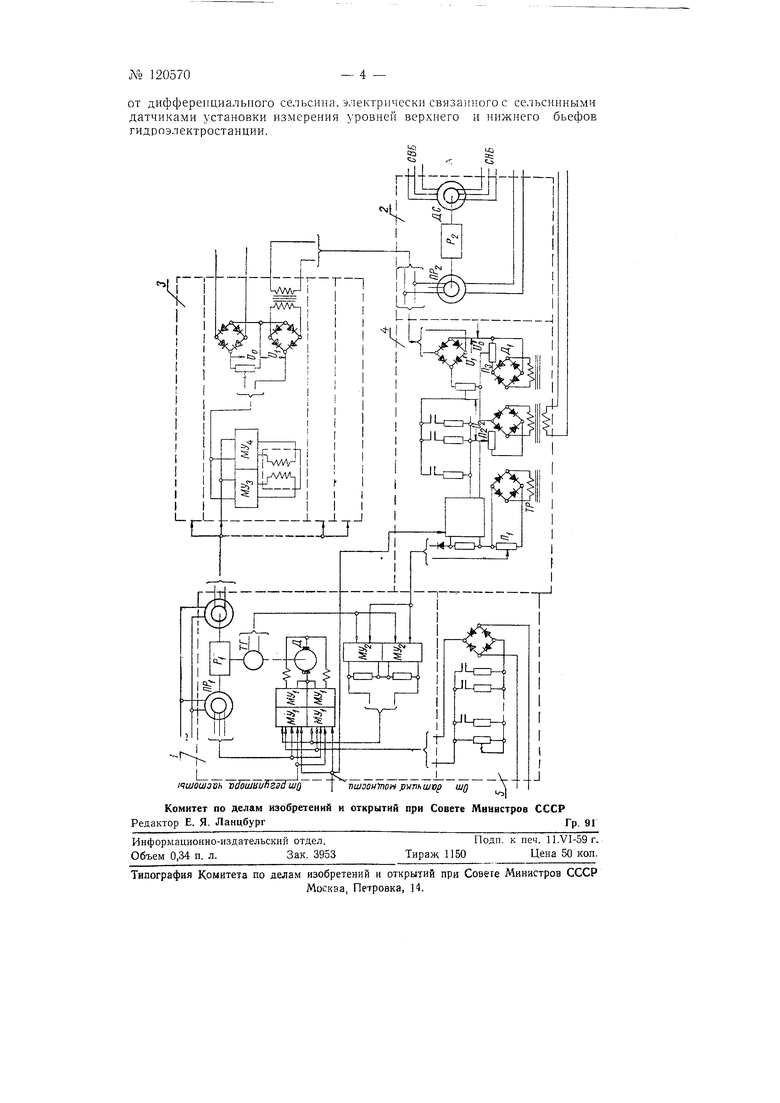
На чертеже показана блок-схема предлагаемого автооператора, в
состав которого входят: блок /, блок iiav
ный блок 5, блок 4 измерения вращающегося резе{ - лнигдля С1мещеиия характеристикн оператора. Устро/ с ;: ---,
Входной блок 1 выполнен в виде следящей систем,
-снлителях МУь унравляющлх двигателем Д, вращаюигЯ/л Магнитолу тор PI потенциал-регулятор UP,.Хс,пез ре,
Оеобенность входного блока заключается в введении, стройки его работы от влияния кратковременных изменений связи с колебаниями частоты в энергосистеме, пропорционально симости скоростью отработки и величиной рассогласования1 осуществляется путей; применения обратной связи по скорости врашх ния указанного двигателя Д потенциал-регулятора с помощью тахоге ч нератора ГГ, устаиовотенного на одном валу с двигателем Д и питающего через магнитный усилитель .-МУг дополнительные обмотки на магннтных усилителях МУ
В блоке напора 2 в качеетве датчика величины напора применен потенциал-регулятор ПР, управляемый через редуктор Рг от дифференциального сельсина ЦС, электрически связанного с сельсиииыми датчиками -стаиовки измере1ия уровней всрхпсчю (сельсин СВБ) нижнего (сельсин СНБ бьефов электростанции.
Исполнительный блок 3 состоит из релейных элементов (ячеек) по числу гидроагрегатов станции, выно.чнснных каждый на двух магнитных усилителях Л1Уз и .;, работающих в релейном режиме и подключенных к потенциал-регулятору ЯР; входного блока 1. Один из этих магнитных усилителей срабатывает при увеличении мощности выще заданной уставки, другой - при снижении ниже заданной уставки.
Уставка релейного устройства может изменяться, начиная с определеииой величины напора, после того как иапряжеиие U от индукционного регулятора IlPz превысит напряжение подпора UQ.
Блок измерения вращ,ающегося резерва измеряет разность между предельной мощностью находящихся в работе агрегатов и заданной суммарной мощцостью. Предельная мощность н-аходящихся в работе агрегатов вводится как произведеиие нредельной мощности одного агрегата на число работающих агрегатов. Умножение на число работающих агрегатов производится включением параллельных еопротизлений по числу агрегатов в цепь, к которой приложено напряжение, пропорциональное предельной мощности одного агрегата.
Включение указанных сопротивлений ироизводится с помощью контактов, управляемых реле, отражаюи их состояиие агрегатов.
Напрялсение Uz, проиорциональное предельной мощности одного агрегата, образуется как алгебраическая сумма двух напряжений: напряжения, пропорционального предельной мощиоети агрегата (по генератору), и напряжения понравки в зависимости от напора, задаваемого потенциал-регулятором ПР.
При напорах выще расчетного предельная мощность агрегата определяется генератором, и поправка по напору не вносится. При цапорах ииже расчетного поправка по напору умеиьщает напряжение, пропорциональное предельной мощности агрегата.
Для этой цели поправка по иапору вводится через диодную схему Дь ие пропускающую воздействия при высоких напорах, когда напряжение, связанное с напором, мало. Напряжение зависящее от напора, растет с уменьщением напора. Начиная с расчетного иапора, это напряжение LJ превыщает противовключенное иапряжеиие f/o, что и позволяет ввести поправку.
В блоке 4 измерения вращающегося резерва с трансформатора Тр снимаются три регулируемые э.д.с., позволяющие осуществить: уставку заданной мощности вращающегося резерва (потенциометр Я), пре- 2 -
делыюр мощности агрегата по генератору (потенциометр Яо) п величины расчетного нанора (потенциометр Яз).
Величина нредель 10Й мощности сравнивается на обмотках магнлтного усилителя МУ, с величиио заданно дющности. Ток на выходе магнитного усилителя МУ пропо11ционален величине вращающегося резерва и сравнивается по дифференциальной схеме на баластных сопротивлениях с заданной величиной вращающегося резерва. Результат сравнения при величине вращающегося резерва меньшей, чем заданная, равен нулю, а при больщей пропорционален разнице ними. Соответствующий снгнал подается во входной блок/. Этот сигнал смещает рабочую точку двутактиого каскада .магнитных усилителей МУ-2 в сторону больше крутизны характер ст К, чем увеличивается коэффицие1 т усиле1 я. Так как через этот каскад ироизвод тся воздейств е отрицательной обратно связи но скорости вращен я дв гатсля Д потенциал-регулятора А/Я;, увеличеи е коэффицие та усиления вь зызает уснле 1не действия обратной связи и сннжает скорость отработки. Следовательно, скорость снижается, есл вращающегося резерва заданной.
Воздействие для смещения характер 1стик автооператора (устройство 5), в частности для пуска резервных агрегатов при отключен агрегата от защиты. производ 1тся на входе следящей с стега 1, как это описаио в oc iOBHOM авт. св. 99359.
Предмет з о б р е т е и я
1.В 1донзме ен е устройства (автооператора) для аБтомат ческого управления агрегатами гидроэлектростанц И но авт. св. Л9 99359. о тл и ч а 0 щ е е с 5 тем, что, с целью упро лення его схемы нуте.м сключення из ее 3.мерительного действител 1ной г дроэлектростанц 1н для возмож ост 1 нднв дуальной настройки параметров нуска и оста 1овки каждо -о из гидроагрегатов (ил аждой грхппь гидроагрегатов) пр выборе оптил альиого числа работающ х агрегатов нр данного t anope и мощност п дростанци 1, вместо коитактны.х полос пуска и остановки гидроагрегатов применены релейные (ячейки) по числу гидроагрегатов станци, выполненные на усилителях, работающих в релейнол релС ме, и подкл очен ые к ноте циал-регулятору входного блока, выполненного в следящей с стемы, с мaгнитны H ус 1лителями, унравля ощими двигателед указанн-ого потенциал-регулятора.
2.Устройство поп. 1, отличающееся тем, что, с целью отстройки его работ з1 от влияния кpaткoвpe e lыx зменений мощност в связи с колебаниями частоты в энергосистеме, применена обратная ц-вкщ по скорости вращеиия электродвигателя потенциал-регулятора, осуществляемая с тахогенератора, установленного на одном валу с указанным электродвигателем и питающего через ус 1литель дополн тельные обмотки на aгнитныx усилителях С стемы управлен я дв гателем потеициал-регулятора.
3.Устройство по пп. 1 и 2, о т л и ч а ю щ е е с я тем, что, с определения величины вращающегося резерва, применена схема из параллельно соединенных сопротивлений (по числу работа ощих п дроагрегатов), подключенных к диодной схеме, выходное напряжение которой пропорционально предельно мощности одного г дроагрегата пр напоре.
4.В устройстве по нн. 1, 2 и 3 в качестве ве. личины апора - потенциал-регулятора, управляемого через редуктор
ль 120570