2. Устройство для измерения кривизны и азимута буровых скважин, содержащее отсчетный блок, размещенный на дневной поверхности, линию связи и скважинный прибор, в корпусе которого расположены датчики зенитного угла и апсидальной плоскости отличающееся тем, что скважинный прибор снабжен ротором, элементом развертки его вращения в виде диска с отверстием, узлом подкрутки ротора, синхронным двигателем, источником и приемником света, при этом узел подкрутки ротора выполнен в виде цилиндрического корпуса и размещенной в нем электромагнитной муфты сцепления, связан с синхронным двигателем и установлен с возможностью вращения в кор1
Изобретение относится к буровой технике, а именно к способам контроля за направлением оси скважины, в частности технологии измерения пространственного положения забоя бурящейся скважины.
Цель изобретения - повыщение точности измерения в ферромагнитных породах.
На фиг. 1 представлена схема, поясняющая сущность предлагаемого способа; на фиг. 2 - диаграммы изменения апсидаль- ного угла в зависимости от кривизны скважины; на фиг. 3 - устройство для осуществления способа.
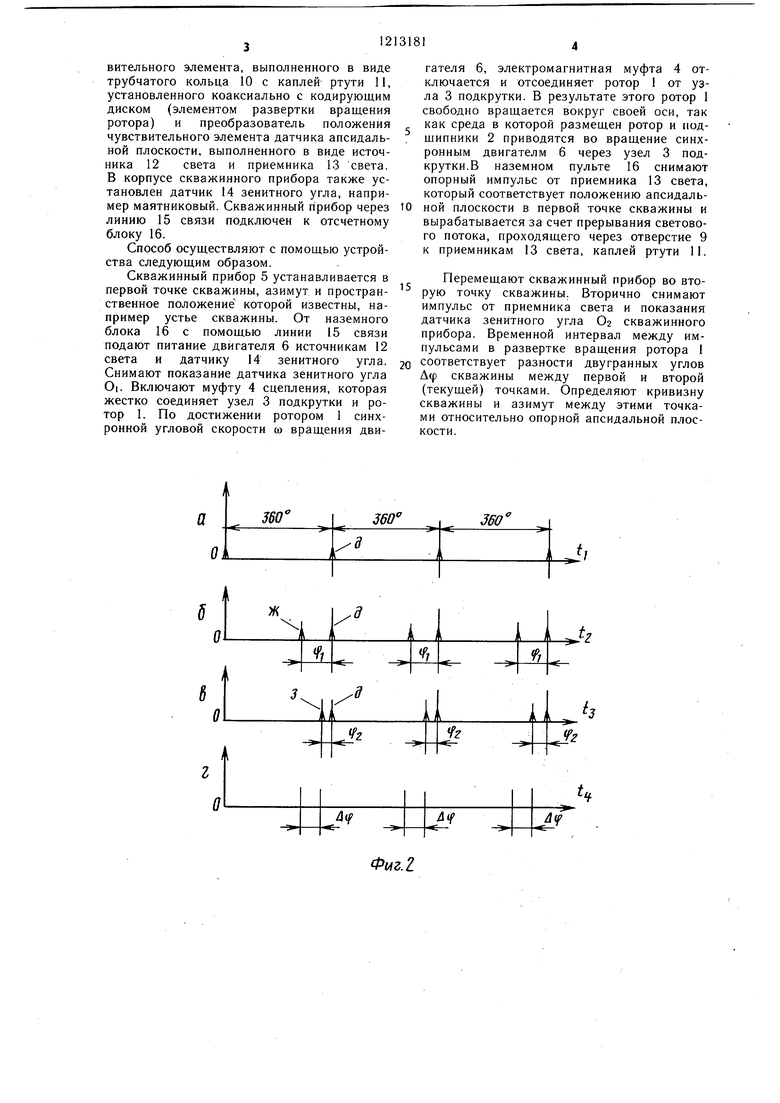
На фиг. 1 обозначены: первая точка Oi измерения, O|X| и OiZi - неподвижная система координат, OiXaZa - циклическая система координат жестко связанная с вращающимся твердым телом 1 (ротор) так, чтобы ось О|Хз совпадала с произвольной точкой ш на роторе, принимаемой за начало цикла (фиг. 2, а), OtX2Z2 - подчиненная (апсидальная) система координат, связанная с ротором так, чтобы оси OiZ-i и OiZa совмещались, а плоскость X2O|Z2 совпадала с апсидальной плоскостью скважины.
Предлагаемый способ осуществляют следующим образом.
В исходном состоянии ротор вращается свободно. При этом положение точки m является . циклической координатой и отмечается сигналами, например, в виде импульсов 2 (фиг. 2, а) с датчика апсидальной плоскости (не показан).
Точка m в результате вращения в отдельные мгновения совпадает с осью OiX2. Момент этого совпадения выделяется датчиком апсидальной плоскости и отмечается импульсом ж (фиг. 2, б). Величина временного интервала между импульсами цикпусе скважинного прибора, а ротор установлен в цилиндрическом корпусе узла подкрутки соосно или параллельно его оси с возможностью свободного вращения, задаваемого синхронным двигателем посредством электромагнитной муфты сцепления, связанной с осью вращения ротора, на другом конце которой установлен диск с отверстием, причем датчик апсидальной плоскости установлен коаксиально с диском, а источник света и приемник размещены соосно и соответственно под датчиком апсидальной плоскости и над диском с возможностью проникновения светового потока через отверстие в диске.
лической координаты д (фиг. 2, а) и импульсами ж отметки апсидальной плоскости (фиг. 2 б) пропорциональна апси- дальному
При перемещении ротора 1 по скважине из точки О| в точку Оа (фиг. 1), момент совпадения точки m с осью 02X2 при искривлении скважины смещен относительно циклической координаты и выделяется в виде импульса з, (фиг. 2, в). Временной интервал между этими импульсами представляет величину апсидального угла
ф2.
Измеряя значение ф1 и фг в точках Oi и О2 получают разницу этих углов
Дф (фиг. 2, г) Измерение зенитных углов Oi и О2 в первой и второй точках производят обычным датчиком зенитных углов (не показан). Таким образом получают все необходимые параметры для вычисления азимута искривления скважины в точке О2 относительно точки О.
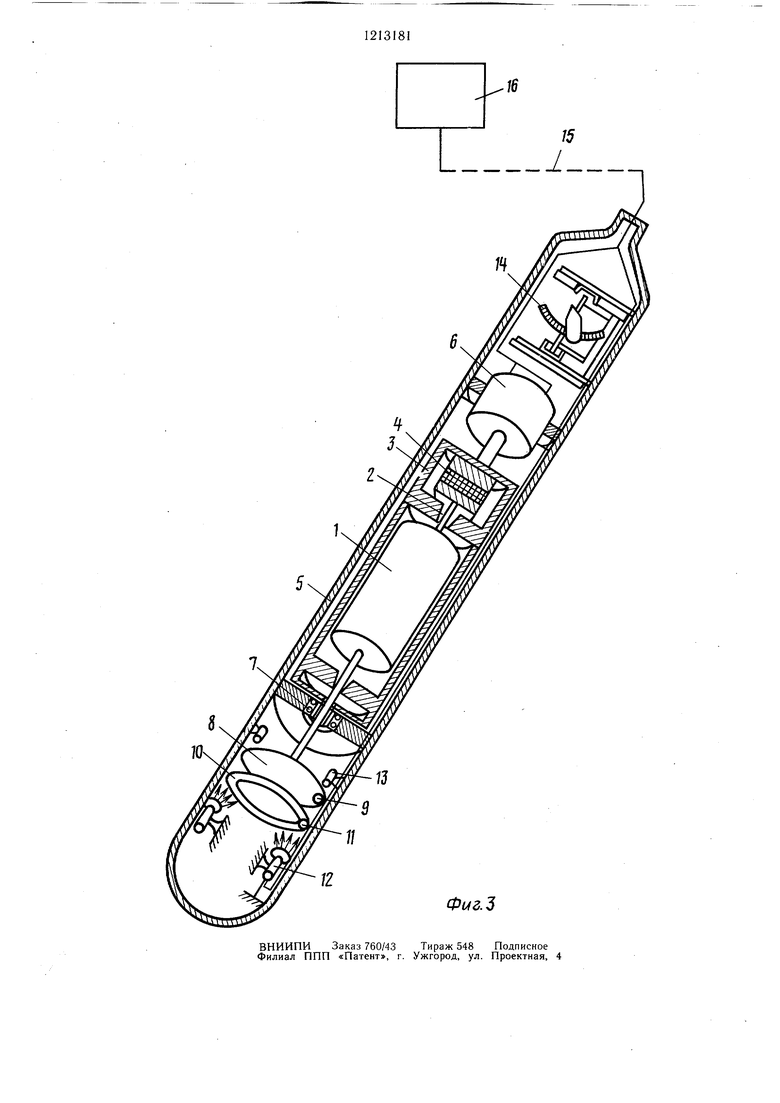
Устройство для- измерения кривизны и азимута буровых скважин (фиг. 3) содержит ротор I, установленный на подщипни- ках 2, узел 3 подкрутки в виде корпуса, в котором разещен ротор 1. Последний и узел подкрутки 3 связаны между собой электромагнитной муфтой 4 и установлены в скважинном приборе 5. При этом узел подкрутки с одной стороны соединен с валом синхронного двигателя 6, а с
другой опирается на внутреннюю обойму подшипника 7. Вал ротора через этот подщипник выведен наружу корпуса подкрутки и снабжен элементом 8 развертки его вращения (кодирующим диском), в котором выполнено отверстие 9. В корпусе скважинного прибора установлен датчик апсидальной плоскости, состоящий из чувст
вительного элемента, выполненного в виде трубчатого кольца 10 с каплей ртути 11, установленного коаксиально с кодирующим диском (элементом развертки вращения ротора) и преобразователь положения чувствительного элемента датчика апсидаль- ной плоскости, выполненного в виде источника 12 света и приемника 13 света. В корпусе скважинного прибора также установлен датчик 14 зенитного угла, например маятниковый. Скважинный прибор через линию 15 связи подключен к отсчетному блоку 16.
Способ осуществляют с помощью устройства следующим образом.
Скважинный прибор 5 устанавливается в первой точке скважины, азимут и пространственное положение которой известны, например устье скважины. От наземного блока 16 с помощью линии 15 связи подают питание двигателя 6 источникам 12 света и датчику 14 зенитного угла. Снимают показание датчика зенитного угла Oi. Включают муфту 4 сцепления, которая жестко соединяет узел 3 подкрутки и ротор 1. По достижении ротором 1 синхронной угловой скорости со вращения двигателя б, электромагнитная муфта 4 отключается и отсоединяет ротор 1 от узла 3 подкрутки. В результате этого ротор 1 свободно вращается вокруг своей оси, так как среда в которой размещен ротор и подшипники 2 приводятся во вращение синхронным двигателм 6 через узел 3 подкрутки.В наземном пульте 16 снимают опорный импульс от приемника 13 света, который соответствует положению апсидаль- ной плоскости в первой точке скважины и вырабатывается за счет прерывания светового потока, проходящего через отверстие 9 к приемникам 13 света, каплей ртути II.
Перемещают скважинный прибор во вторую точку скважины. Вторично снимают импульс от приемника света и показания датчика зенитного угла О2 скважинного прибора. Временной интервал между импульсами в развертке вращения ротора I соответствует разности двугранных углов Лф скважины между первой и второй (текущей) точками. Определяют кривизну скважины и азимут между этими точками относительно опорной апсидальной плоскости.
Фиг. 2
I2
щ
0WaJ
ВНИИПИ Заказ 760/43 Тираж 548 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кривизны и азимута искривления буровых скважин | 1977 |
|
SU721527A1 |
| Инклинометр | 1987 |
|
SU1490264A1 |
| Прибор для измерения углов измерения скважины | 1978 |
|
SU746097A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА ПЛОСКОСТИ НАКЛОНЕНИЯ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165524C2 |
| Оптоэлектронный инклинометр | 1981 |
|
SU1016492A1 |
| Устройство для измерения азимута и зенитного угла скважин | 1974 |
|
SU470597A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| Устройство для определения угла наклона и направления искривления скважины | 1980 |
|
SU894182A1 |
| Устройство для определения азимута и визирного угла в скважине | 1984 |
|
SU1162959A1 |
| Устройство для измерения углов положения скваженного прибора | 1982 |
|
SU1146423A1 |
1. Способ измерения кривизны и азимута буровых скважин, основанный на задании-опорной плоскости и измерении зенитных углоч в двух точках оси скважины, отличающийся тем, что, с целью повышения точности измерения в ферромагнитных породах, за опорную принимают апсидаль- иую плоскость, задают отсчетную плоскость, составленную направлением циклической координаты свободно вращающегося твердого- тела, например ротора, и его осью, измеряют и фиксируют значение двугранного угла между опорной и отсчетной плоскостями в первой и текущей точках, сравнивают полученные значения и по разности двугранных углов и значениям изеренных зенитных углов судят о положении оси инклинометра относитель- - но опорной плоскости в первой точке. Э } а (Л to оо СХ) г,2
| Способ измерения кривизны и азимута искривления буровых скважин | 1973 |
|
SU448280A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для измерения кривизны и азимута искривления буровых скважин | 1977 |
|
SU721527A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
