Изобретение относится к гироскопическому инклинометру и способу определения угловой ориентации скважин, предназначеных для исследования траекторий нефтяных, газовых, геотермальных, железорудных и других скважин.
Известны устройства (1) гироскопического типа, в которых, как правило, гироскопы работают в режимах датчиков угловых скоростей (ДУС), которые измеряют составляющие проекции угловой скорости вращения Земли. Акселерометры измеряют проекции ускорения силы тяжести.
Результаты измерений обрабатываются, после чего определяется зенитный угол и азимутальное направление ствола скважины.
Недостатком известных устройств является то, что наличие внешнего двухосного подвеса или более двух чувствительных элементов резко увеличивает количество электронных блоков, энергопотребление, массу и габариты инклинометра, ограничивает точностные характеристики устройства из-за взаимовлияния чувствительных элементов между собой и нестабильности баз взаимопривязки элементов между собой.
Первичные сигналы о повышении осей гироскопа и акселерометра фильтруются, преобразуются в цифровую форму и обрабатываются в микропроцессоре. Точность обработки данных зависит от разрешающей способности датчика, определяющего положение прибора и от способности системы отделять истинные сигналы от ложных любого происхождения.
Недостатком этого устройства является то, что самокалибровка устройства осуществляется лишь через 180o. А это ограничивает достижение высоких точностей. Кроме того, здесь гироскоп работает в режиме ДУСа. Следовательно, точность измерения существенно зависит от стабильности элементов обратной связи.
Наиболее близким техническим решением является устройство 2, содержащее корпус, гироскопический двухосный датчик угловой скорости и устройство измерения зенитного угла, состоящее из трех акселерометров и предназначенное для определения пространственных координат скважин. Этому устройству также присущи недостатки, связанные с режимом ДУСа, т.е. наличием обратной связи. В устройстве отсутствуют операции по автокомпенсации систематического дрейфа гироскопа.
Перечисленные выше недостатки ухудшают эксплуатационные возможности инклинометра, увеличивают стоимость его изготовления и стоимость эксплуатации, уменьшают надежность инклинометра.
Технический результат изобретения заключается в том, чтобы существенно улучшить эксплуатационные возможности гироскопического инклинометра и повысить точность определения угловой ориентации скважин.
Указанный результат достигается тем, что гироскопический инклинометр содержит корпус, размещенный в нем трехстепенный гироскоп, оси чувствительности которого ортогональны продольной оси корпуса, акселерометр, ось чувствительности которого также ортогональна продольной оси корпуса и совпадает по направлению с одной из осей чувствительности гироскопа и все они установлены на поворотную платформу с приводом и возможностью неограниченного вращения относительно продольной оси корпуса, введен датчик углового положения поворотной платформы и устройство электрической связи между поворотной платформой и корпусом.
Суть изобретения в части способа состоит в том, что повышается точность измерения угловой ориентации скважин, так как измерение проекции угловой скорости производят трехстепенным гироскопом, работающим в режиме интегрирования угловой скорости в нескольких ориентациях, путем разворота измерителя угловой скорости и ускорения относительно продольной оси скважины, по результатам измерения выделяют дрейф гироскопа и находят положение апсидальной плоскости, устанавливают одну из осей чувствительности измерителя угловой скорости в эту плоскость, измеряют проекцию угловой скорости вращения Земли и ускорения силы тяжести, а вычисление азимута и зенитного угла производят по данным, полученным в последней ориентации с учетом выделенного дрейфа гироскопа.
Пример блок-схемы устройства показан на фиг. 1, где:
1 - трехстепенный гироскоп, например, ДНГ, содержащий датчик угла ДУ-a, ДУ-b; датчики момента ДМ-a, ДМ-b; двигатель гироскопа;
2 - усилитель системы электрического арретирования (УСЭА) ротора ДНГ каналов "a" и "b";
3 - акселерометр, например маятникового типа (МА);
4 - усилитель обратной связи (УОС) МА;
5 - датчик углового положения поворотной платформы;
6 - аналого-цифровой преобразователь (АЦП) угловой информации;
7 - двигатель поворотной платформы (ДПП);
8 - цифро-аналоговый преобразователь для ДПП;
9 - блок управления двигателем гироскопа;
10 - блок питания (БП);
11 - интерфейсная плата;
12 - АЦП выходных сигналов ДНГ и МА;
13 - вычислитель, например ПЭВМ типа IBM;
14 - поворотная платформа;
15 - блок электронных устройств.
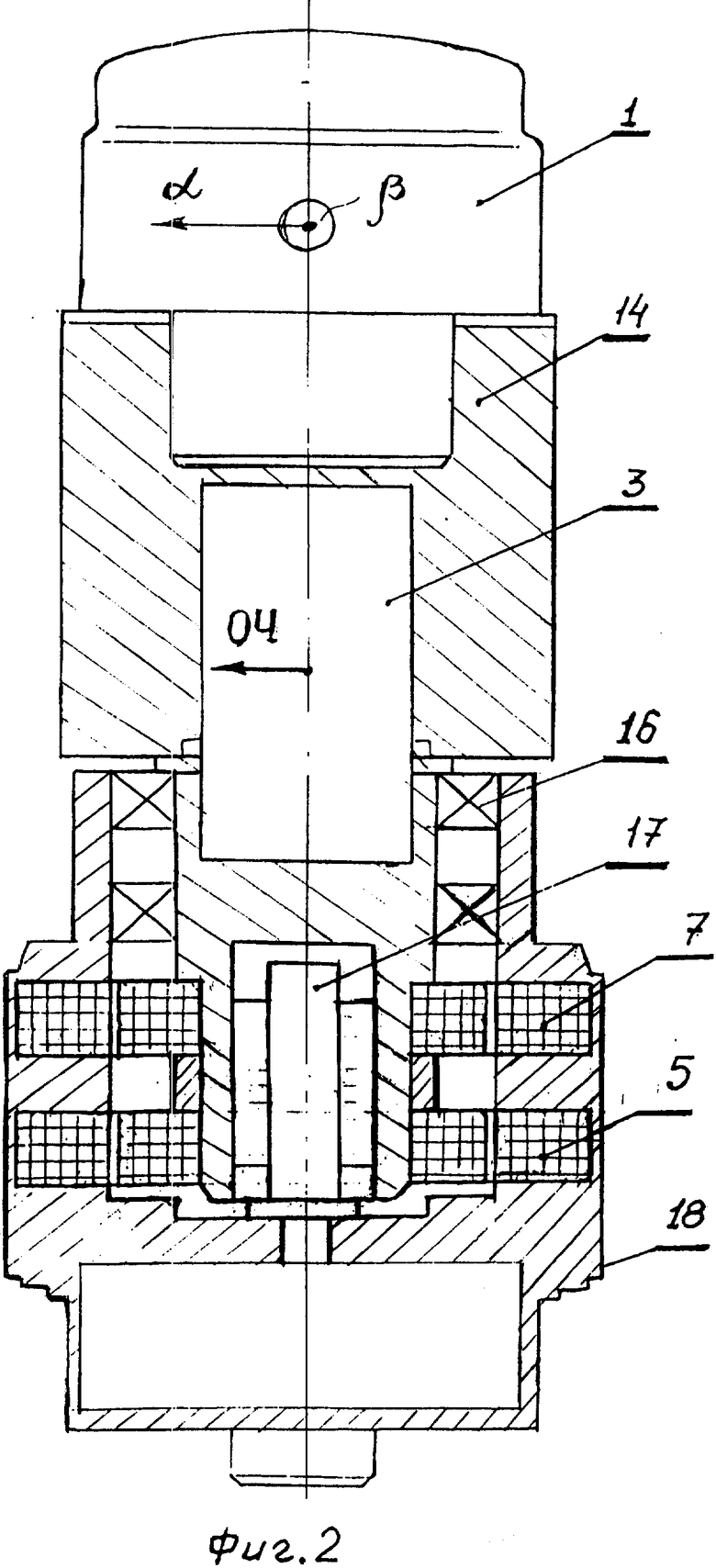
Конструктивная схема механической части устройства показана на фиг. 2, где дополнительно обозначено:
16 - шарикоподшипниковая опора;
17 - коллектор;
18 - корпус.
Трехстепенный гироскоп 1, например ДНГ, и акселерометр 3, например, маятникового типа, размещены на поворотной платформе 14, которая на шарикоподшипниковых опорах 16 установлена в корпусе 18. Двигатель поворотной платформы 7 обеспечивает разворот платформы в заданную ориентацию, при этом контроль разворота осуществляется по датчику углового положения 5. коллектор 17, размещенный между корпусом 18 и поворотной платформой 14, осуществляет электрическую связь между элементами устройства. Усилитель системы электрического арретирования 2, входы которого соединены с датчиками угла гироскопа, а выходы с соответствующими датчиками момента гироскопа обеспечивает приведение ротора гироскопа в исходное положение и удержание ротора в этом положении. Усилитель обратной связи 4 обеспечивает функционирование маятникового акселерометра в компенсационном режиме. Назначение остальных элементов и блоков устройства ясно из их названия.
Количества предварительных ориентаций поворотной платформы выбирается исходя из требуемой точности измерения параметров угловой ориентации скважины, но должно быть не менее трех, как это будет показано далее.
Пример реализации способа с ДНГ:
1. Разгоняют ДНГ до скорости динамической настройки.
2. Включают систему электрического арретирования (СЭА) каналов "a" и "b" ДНГ.
3. Двигателем поворотного устройства устанавливают механическую часть прибора в ориентацию 0 град.
4. Отключают СЭА и измеряют траекторию движения аппекса гироскопа по сигналам с ДУ-a и ДУ-b ДНГ за время Δt , одновременно измеряют сигнал с акселерометра.
Цикл (пп. 2, 3, 4) повторяют восемь раз на углах 0, 45, 90, 135, 180, 225, 270 и 315 град.
5. Находим положение апсидальной плоскости, для этого:
- определяем три последовательных положительных значения сигнала с акселерометра Uj<Uj+1<Uj+2;
- определяем дополнительный угол "u": Uj+2 / Uj = tg u;
- к значению угла датчика углового положения платформы соответствующего минимальному положительному значению сигнала акселерометра прибавим значение дополнительного угла "u";
- выставляем платформу в это положение, что соответствует девятой ориентации (в этой ориентации оси чувствительности "a" гироскопа и акселерометра устанавливаются в апсидальную плоскость).
6. Находим значение зенитного угла Q, sinQ = Umax / Км, где:
Км - масштабный коэффициент, мв/д•сек,
7. Таким образом, полученный массив данных подлежит дальнейшей обработке:
a1...a9, мв;
b1...b9, мв;
U1...U9, мв;
- находим среднее значение a0 и b0 ,
,
- вычисляем проекцию азимутального угла на торцевую плоскость гироскопа в девятой ориентации:
tgA9 = (a9 - a0) / (b9 - b0),
откуда находим A9 (град).
Значение полного азимутального угла на торцевую плоскость гироскопа находится из условий:
а) если a9>a0
b9<b0, то Aп = O0 + A9
б) если a9<a0
b9<b0, то Aп = 180o - A9
в) если a9<a0
b9>b0, то Aп = 180o + A9
г) если a9>a0
b9>b0, то Aп = 360o - A9
8. A ист1,2 = 2 arctgt1,2 ,
,
где
A = Aп - 180o, если O0<Aп<180o
A = 360o - Aп, если 180o<Aп<360o
Q - зенитный угол
λ - - широта места испытаний.
9. Для определения однозначности A ист1 или A ист2 используем дополнительный признак по каналу "b" гироскопа:
cosA
где
b2 - величина горизонтальной составляющей вращения Земли на месте испытаний (мв), причем:
а) если cosAβ отрицательный, то 
б) если cosAβ положительный, то  .
.
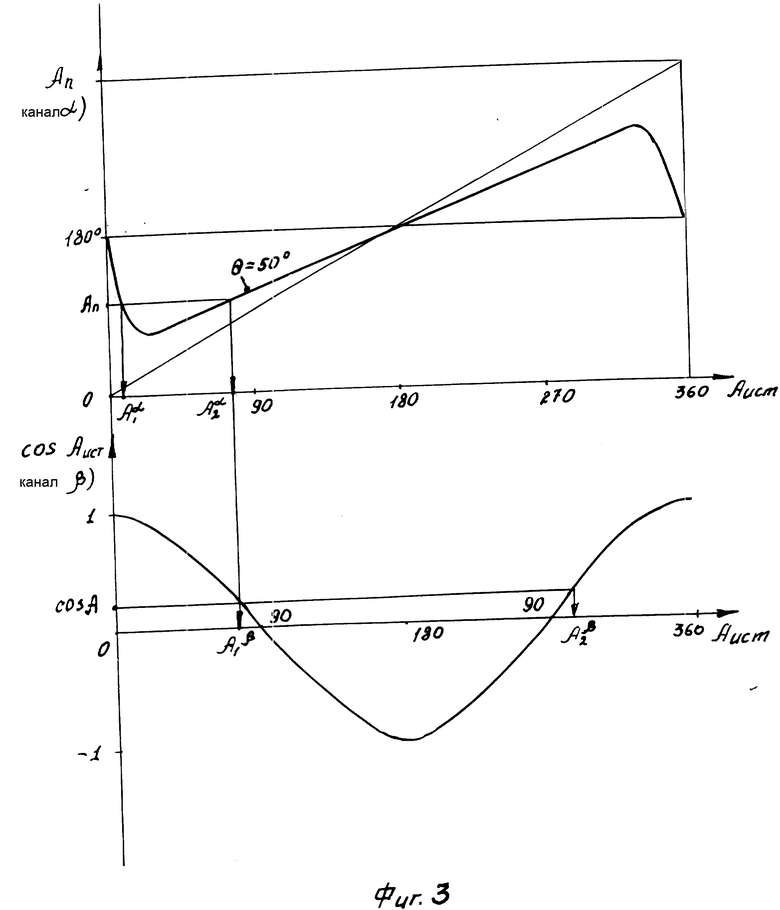
10. Определение истинного азимута:
- если A ист принимается то значение, которое совпадает со значение A
ист принимается то значение, которое совпадает со значение A
- если A
Графическая иллюстрация определения истинного азимута представлена на фиг. 3.
Здесь для значений θ = 50o и λ = 55o имеет место совпадение значений A
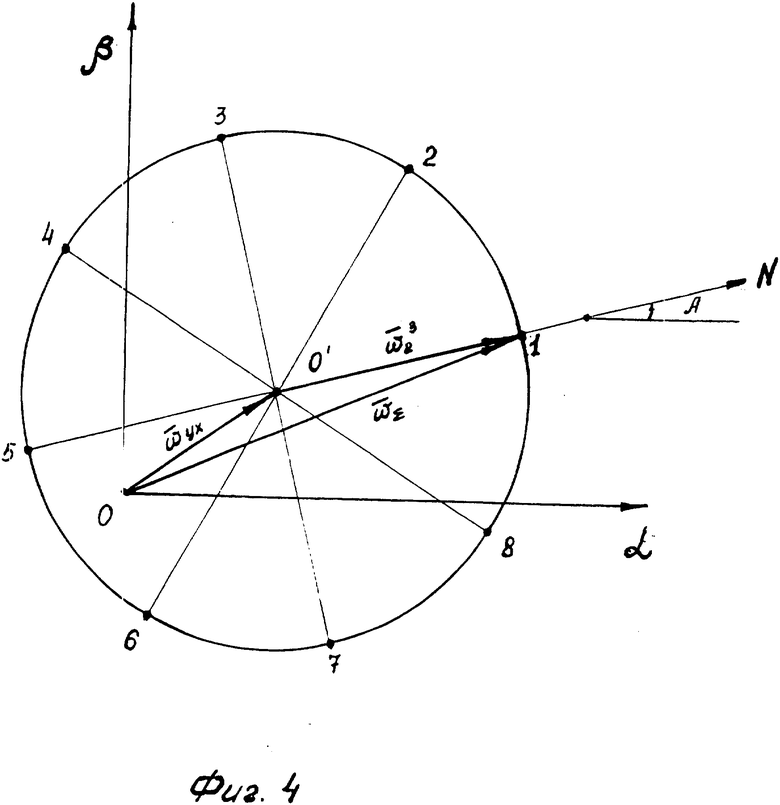
Геометрическая интерпретация сути способа показана на фиг. 4 (для значения θ = 0), где: ,
, - вектор видимого ухода аппекса гироскопа;
- вектор видимого ухода аппекса гироскопа; - вектор собственного ухода гироскопа;
- вектор собственного ухода гироскопа; - вектор горизонтальной составляющей вращения Земли.
- вектор горизонтальной составляющей вращения Земли.
Точки 1 - 8 означают положение конца вектора видимого ухода в ориентациях 0, 45, 90, 135, 180, 225, 270 и 315 град.
Точка 0 - центр окружности, которой принадлежат точки 1 - 8. Последняя ориентация - точка 8. По полученным координатам точек 0 и 8 определяют азимутальное направление или угол между плоскостью меридиана и апсидальной плоскостью.
В процессе вычислений вводится соответствующие поправки на разность крутизны сигнала с ДУ-a и ДУ-b.
Существенная новизна способа и устройства его реализующего состоит в следующем:
- измерения проводятся в режиме интегрирования угловой скорости;
- контрольное измерение проводится при установке оси "a" ДНГ в апсидальную плоскость;
- в режиме поиска апсидальной плоскости происходит определение систематического дрейфа гироскопа.
Полезность устройства состоит в следующем:
- расширяются эксплуатационные возможности, так как уменьшаются масса, габариты, энергопотребление;
- повышается точность измерения, так как систематические составляющие погрешностей автокомпенсируются в каждом запуске, устранено взаимовлияние чувствительных элементов друг на друга;
- высокая степень точностной готовности, благодаря режиму автокомпенсации погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
Использование: для исследования траекторий нефтяных, газовых, геотермальных, железорудных и др. скважин. Сущность изобретения: измерения проводятся в режиме интегрирования угловой скорости свободным трехстепенным гироскопом и акселерометром в нескольких ориентациях. Контрольное измерение приводится в ориентации одной из осей чувствительности гироскопа и акселерометра в апсидальной плоскости. В процессе изменения систематические составляющие погрешностей гироскопа компенсируются. Заявленные технические решения существенно расширяют эксплуатационные возможности устройства, в т.ч. уменьшаются его габаритно-массовые характеристики, энергопотребление, точностная готовность и существенно повышается точность измерения. 2 с.п. ф-лы, 4 ил.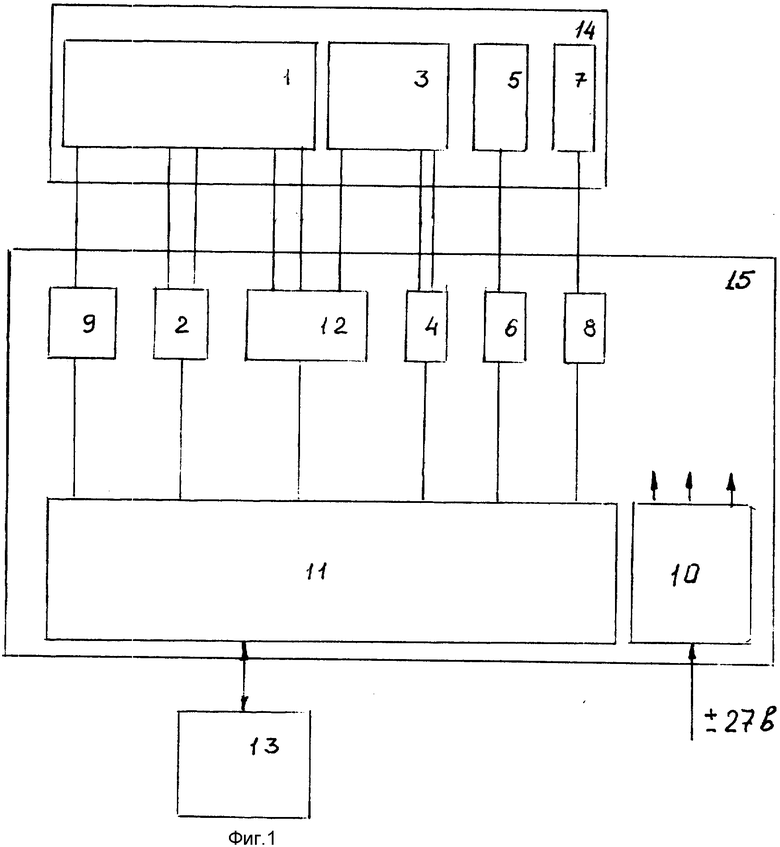
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исаченко В.Х | |||
| Инклинометрия скважины | |||
| - М.: Недра, 1987, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1827541, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
