Изобретение относится к медицине- ской технике, а именно к физиотерапевтическим устройствам, и может быть использовано для электростимуяя- ционной тренировки мьппечного аппара- та.
Цель изобретения - стимуляция работающих мьшц путем автоматизации электростимуляционного воздействия в зависимости от момента опорно-без- опорного движения пациента.
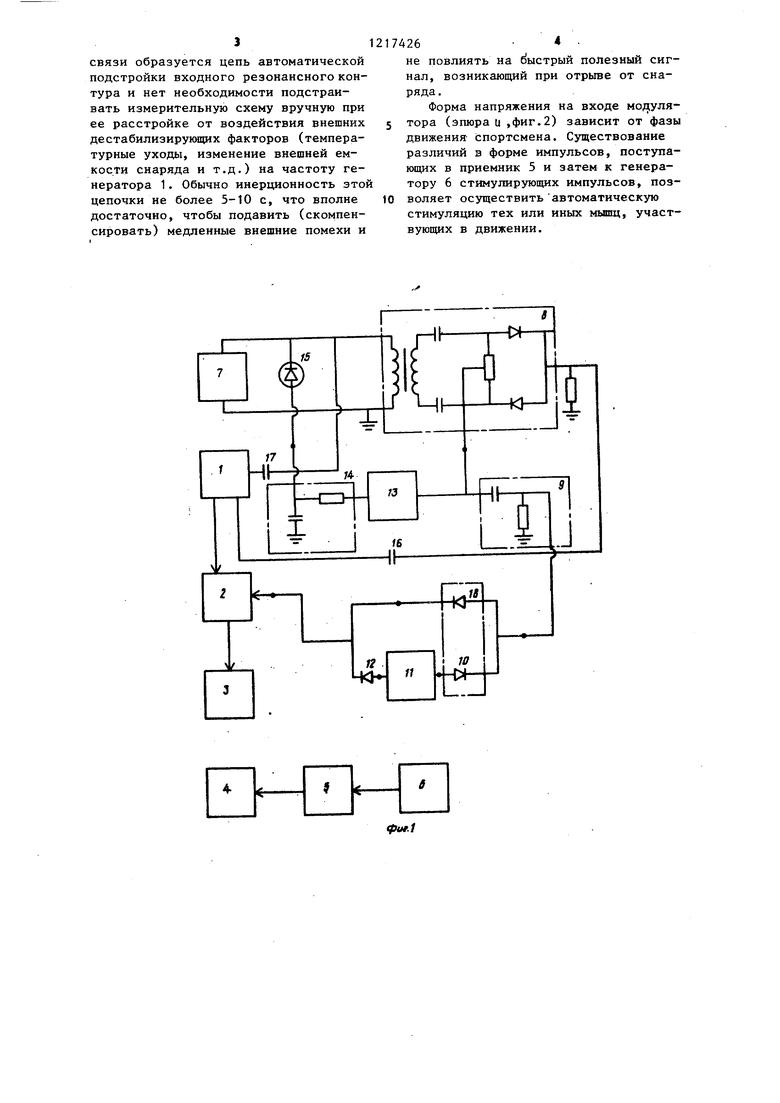
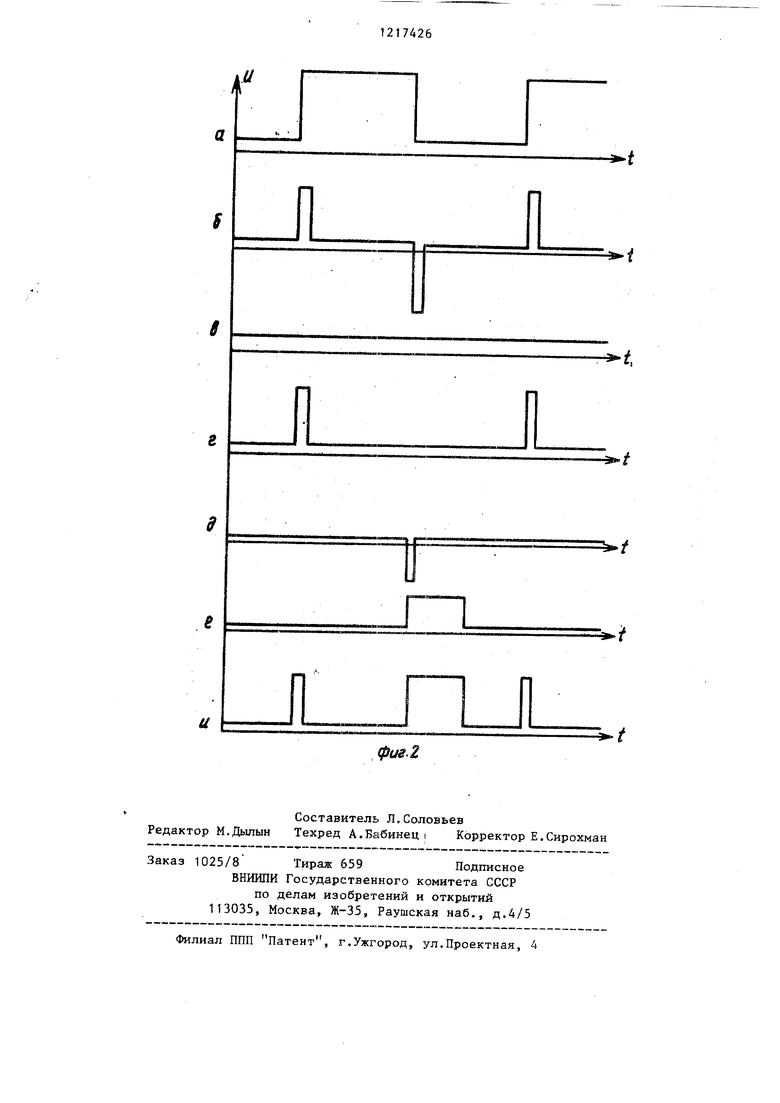
На фиг. 1 изображена структурная схема электростимулятора; на фиг,2 - эпюры напряжений, иллюстрируищие работу электростимулятора.
Электростимулятор содержит последовательно соединенные генератор t опорной частоты, модулятор 2 и передающую антенну 3 и также приемную антенну 4 приемник 5 и генератор 6 стимулирующих импульсов. Кроме того, электростимулятор снабжен последовательно соединенными емкостным датчиком 7, фазовым дискриминатором 8, дифференцирующей цепью 9, первым дно- дом 10, одновибратором 11 и вторым диодом 12, подключенным к модулятору 2, а также последовательно соединенными усилителем 13, генератором 1 и варикапом 15, подключенным к фазовому дискриминатору 8.В электростимуляторе первый конденсатор 16 соединен с генератором 1 и фазовым дискриминатором 8, второй конденсатор 17 подключен к генератору 1 и емкостному датчику 7, а третий- диод 18 соединен с дифференцирукяцей цепью 9 и модулятором 2. При этом емкостный датчик 7 выполнен, например, в виде двух металлических пластин конденсатора, являющегося частью резонансного контура, включенного через трансформатор к входу фазового дискриминатора 8.
Устройство работает следующим образом.
В момент опоры, например, спортсмена на снаряд происходит изменение емкости датчика 7 вследствие изменения в пространстве между его металлическими пластинами диэлектрической проницаемости б за счет тела спортсмена.
Изменение величины фазового набега колебаний опорной частоты приводит к появлению на выходе дискриминатора 8 выходного напряжения, пропорционального разности фаз сигналов
с выхода генератора 1 резонансного контура датчика 7. Напряжение с выхода фазового дискриминатора 8 дифференцируется цепью 9. В зависимости от фазы движения спортсмена на выходе дифференцирующей цепи 9 формируются импульсы разной полярности: при касании спортсменом снаряда - положительные, при отрыве от снаряда О отрицательные (эпюра ,фиг.2).
Импульсы положительной полярности проходят через третий диод 18(эпюра g ,фиг.2) и далее поступают на второй вход модулятора 2, модулируя на5 пряжение, поступающее на модулятор с выхода генератора 1.Импульсы отрицательной полярности проходят через первый диод 10 (эпюра ,фиг.2) на одновибратор 11 и второй диод 12.
0 Одновибратором 11 формируется импульс длительностью в 2-3 раза больше исходного (эгпора е,фиг.2),, который инвертируется Вторым диодом 12 и подается на второй вход модулято5 ра 2.
Таким образом, при переменных фазах движения спортсмена во время спортивного действия на второй вход модулятора 2, связанного с переда0 ющей антенной 3, приходят импульсы (эпюра И ,фиг.2), определяющие моменты перехода движения спортсмена из одной фазы в другую. Это позволяет на расстоянии точно фиксировать мо,- менты опорно-безопорного состояния спортсмена.
Принятые приемной антенной 4 импульсы проходят через приемник 5 к генератору 6 стимулирукнцих импульсов. Последний вьщает в момент прихода команд от приемной антенны стимулирующее напряжение на электроды, закрепленные на мышцах спортсмена. Таким образом, подача стимулирующих им пульсов осуществляется автоматически и момент их подачи связан точно с моментами опорно-безопорного состояния спортсмена. Чтобы электростимулятор был устойчив по отношению к внеш0 ним помехам и различным дестабилизирующим факторам, в нем действует цепь обратной связи с внешним контуром: сигнал с выхода фазового дискриминатора 8 поступает на усилитель 13пос3 тоянного тока, на выходе которого включен интегратор 14. Напряжение с интегратора 14 (эпюра & фиг,2) подается на варикап 15. С помощью этой
121
связи образуется цепь автоматической подстройки входного резонансного контура и нет необходимости подстраивать измерительную схему вручную при ее расстройке от воздействия внешних 5 дестабилизирующих факторов (температурные уходы, изменение внешней емкости снаряда и т.д.) на частоту генератора 1. Обычно инерционность этой цепочки не более 5-10 с, что вполне ю достаточно, чтобы подавить (скомпенсировать) медленные внешние помехи и
426. 4 .
не повлиять на dыcтpый полезный сигнал, возникающий при отрыве от снаряда.
Форма напряжения на входе модулятора (эпюра U ,фиг.2) зависит от фазы движения спортсмена. Существование различий в форма импульсов, поступающих в приемник 5 и затем к генератору 6 стимулирующих импульсов, позволяет осуществить автоматическую стимуляцию тех или иных мышц, участвующих в движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический электронныйВлАгОМЕР | 1979 |
|
SU798635A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ИМПУЛЬСОВ | 1995 |
|
RU2098918C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ЭЛЕКТРОСТИМУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2266762C2 |
| ЭЛЕКТРОСТИМУЛЯТОР | 1997 |
|
RU2113249C1 |
| Формирователь линейно-частотно-модулированных сигналов | 1986 |
|
SU1424112A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПАЧЕК ИМПУЛЬСОВ | 1995 |
|
RU2098919C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДЕЙСТВИЙ СПОРТСМЕНА НА ДИСТАНЦИИ | 1992 |
|
RU2031679C1 |
| Устройство для измерения координат точек по линии на плоскости | 1991 |
|
SU1779911A1 |
| УСТРОЙСТВО ЕМКОСТНОГО ТИПА ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2015 |
|
RU2613759C1 |
Г±
а
Составитель Л.Соловьев Редактор М.Дылын Техред А.Бабинец i Корректор Е.Сирохман
Заказ 1025/8 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
1
t
фи.2
| Патент США № 3727616, .кл. | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
