Изобретение относится к системам ближней радиолокации (СБРЛ), предназначенным для обнаружения и определения параметров движения целей, как минимум, в двух зонах селекции по дальности. Может использоваться в автономных информационно-измерительных системах в качестве неконтактных датчиков обнаружения приближающихся целей, например, в системах предотвращения столкновений транспортных средств.
Решение задачи контроля наличия цели, как минимум, в двух зонах селекции по дальности востребовано, например, в системах управления сближением посадочного модуля к поверхности Земли или иных планет. При этом в процессе сближения необходимо на определенной высоте подать команду на раскрытие парашютной системы, а на другой, малой высоте, - команду на включение тормозных двигателей мягкой посадки (см. стр. 213, [1]). Аналогичная задача возникает в системах автоматического управления парашютными платформами для доставки грузов в труднодоступные районы [2]. Другой пример - система предотвращения столкновений на транспорте, которая должна обеспечивать подачу предупреждающего сигнала о наличии препятствия на дальнем рубеже зоны контроля (например, 100 м) и включение экстренного торможения при критическом сближении с препятствием на расстояние в единицы метров [3]. В системах обеспечения безопасности при парковке автомобиля также используется два режима работы локационного датчика с контролем расстояния до препятствия в диапазонах 0…6,0 и 0…1,4 м [4]. Подобная задача возникает в военной технике для обеспечения безопасного вождения в колонне при плохой видимости [5], а также самонаведения управляемых снарядов на воздушную цель и ее поражение [6].
Традиционные методы решения указанной задачи основаны на применении отдельных радиолокационных устройств, предназначенных для выполнения одной из задач.
Известны устройства радиоимпульсной локации контролируемого пространства с определением дальности до цели путем измерения времени задержки отраженного от объекта радиоимпульса, заявленные, например, в [7-24]. Принцип действия этих устройств основан на разделении во времени процессов формирования зондирующего и приема отраженного радиосигналов (см. стр. 334-363, [25]). При этом прием отраженного радиосигнала производится на определенном отрезке времени после излучения зондирующего радиоимпульса, которому соответствует дальность обнаружения цели. Путем выбора множества отрезков времени можно формировать несколько зон селекции цели по дальности. Устройства содержат источники зондирующих радиоимпульсов, раздельные антенны для приема и передачи или антенные переключатели, приемники. Недостатками таких устройств являются наличие мертвой зоны в ближней зоне, а также сложность и громоздкость конструкции приемопередающего СВЧ модуля, создающие проблему при их бортовом исполнении, при котором экономичность, малые габариты, вес и стоимость комплектующих являются определяющими факторами.
Известны радиолокационные устройства, также работающие в режиме радиоимпульсного излучения [26-32]. Эти устройства выполнены на основе автогенератора в сверхрегенеративном режиме, который совмещает функции передатчика зондирующих радиоимпульсов и приемника радиосигналов, отраженных от цели. Благодаря такому совмещению сверхрегенеративные приемопередатчики обеспечивают простейшую конструкцию СВЧ модуля. Недостатком устройств на основе сверхрегенераторов является низкая точность определения относительной скорости движения цели из-за отсутствия доплеровской селекции сигналов, полученных от цели.
Известны устройства, в которых функции передатчика и приемника также выполняет единственный каскад - автогенератор (собственно, автодин), работающий в так называемом автодинном режиме [33-41]. Принцип действия этих устройств основан на автодинном эффекте, который состоит в изменениях с частотой Доплера параметров колебаний (амплитуды и частоты), а также тока и/или напряжения в цепи смещения активного элемента под воздействием отраженного от цели излучения. Регистрация (выделение) этих изменений в качестве автодинного сигнала и его обработка обеспечивают получение по частоте Доплера информацию об относительной скорости цели, а по измерениям амплитуды отраженного от цели сигнала и доплеровской частоты - о дальности. Недостатком таких устройств является низкая точность определения расстояния до цели в зоне контроля.
Известны устройства, в которых автодинный приемопередатчик работает в режиме импульсной модуляции излучения [42-56]. При этом приём отражённого радиосигнала и его выделение производятся во время излучения зондирующего радиоимпульса, когда время  запаздывания отражённого радиосигнала меньше длительности
запаздывания отражённого радиосигнала меньше длительности  зондирующих радиоимпульсов (
зондирующих радиоимпульсов ( ) [57,58]. В этом случае процесс выделения информации об отраженном сигнале производится по разности фаз излучаемого и принимаемого радиосигналов вследствие их взаимной когерентности. Относительное перемещение цели и радиолокационного устройства вызывает соответствующие изменения разности фаз этих радиосигналов. Данные изменения фазы в цепи питания автодинного генератора и/или на выходе амплитудного детектора, подключенного к колебательной системе автодина, преобразуются в видеоимпульсы длительностью
) [57,58]. В этом случае процесс выделения информации об отраженном сигнале производится по разности фаз излучаемого и принимаемого радиосигналов вследствие их взаимной когерентности. Относительное перемещение цели и радиолокационного устройства вызывает соответствующие изменения разности фаз этих радиосигналов. Данные изменения фазы в цепи питания автодинного генератора и/или на выходе амплитудного детектора, подключенного к колебательной системе автодина, преобразуются в видеоимпульсы длительностью  . Выделение и «растяжение» по времени этих видеоимпульсов на период их повторения
. Выделение и «растяжение» по времени этих видеоимпульсов на период их повторения  путем временного стробирования схемой выборки-хранения и последующая фильтрация обеспечивают формирование доплеровского сигнала. Этот сигнал служит для измерения скорости, определения относительно исходного текущего положения цели и решения задачи ее обнаружения.
путем временного стробирования схемой выборки-хранения и последующая фильтрация обеспечивают формирование доплеровского сигнала. Этот сигнал служит для измерения скорости, определения относительно исходного текущего положения цели и решения задачи ее обнаружения.
Известны также конструктивно простые радиолокационные устройства [59,60], выполненные на основе автодинного генератора. Устройства содержат последовательно соединенные, блок формирования тактирующих импульсов, автодинный генератор с присоединенной к нему антенной и средства выделения и усиления автодинного сигнала. В этих устройствах используется принцип формирования парных радиоимпульсов на одной частоте, из которых первый радиоимпульс является зондирующим, а второй - приемным. При этом отраженный радиоимпульс во время его приема смешивается с генерируемым автодинным генератором вторым радиоимпульсом той же пары, когда время задержки отраженного радиоимпульса совпадает с временным интервалом между парами. В результате этого смешения возникает реакция автодина в виде изменения его режима работы: амплитуды колебаний, тока и/или напряжения в цепи питания генератора. Выделение этих изменений в виде полезного сигнала обеспечивает получение информации о цели. Согласно патенту [59], указанные изменения режима происходят с доплеровской частотой, что обеспечивает возможность селекции цели как по дальности, так и по скорости ее перемещения.
Недостатками устройств, заявленных в материалах [42-56] являются невозможность точного определения текущего расстояния до цели, поскольку принцип действия их основан на получении и обработке доплеровских сигналов [57,58]. При этом фликкерные флуктуации параметров колебаний автодинного генератора ограничивают максимальную дальность действия СБРЛ.
Способ радиоимпульсной локации устройства, заявленного в [60], состоит в формировании амплитудно-модулированного (АМ) первого радиоимпульса пары, излучении его в направлении цели, приеме части отраженного от цели излучения, воздействии принятым излучением на автодинный генератор во время формирования следующего радиоимпульса пары, выделении в генераторе автодинного сигнала на частоте АМ излучаемого радиоимпульса, усилении и сравнении амплитуды автодинного сигнала с пороговым уровнем.
Анализ технического решения, заявленного в [60], показал, что в качестве зондирующего излучения в этом устройстве используется энергетически невыгодный вид модуляции - амплитудный. При таком виде модуляции даже при стопроцентной глубине модуляции мощность боковых составляющих колебания составляет примерно треть (0,375) относительно пикового значения мощности или половину относительно мощности немодулированного несущего колебания (см. стр. 88, [61]). Кроме того, известно, что прием сигнала с АМ посредством автодинного генератора также не является оптимальным. Воздействие отраженного радиосигнала на автодинный генератор с такой же несущей частотой вызывает его захват. При этом АМ воздействующего радиосигнала в синхронизированном автогенераторе ограничивается (см. стр. 54-55, [62], стр. 149-164, [63]). По этой причине результирующая реакция автогенератора как приемного устройства радиолокатора на воздействие АМ сигнала является пониженной или может вообще отсутствовать. Поэтому известное устройство [61] имеет значительные потери в энергетике сигналов, как передатчика, так и приемника, и, соответственно, в дальности его действия как радиолокационного устройства. Дополнительным недостатком этого устройства является низкая точность определения относительной скорости движения цели из-за отсутствия доплеровской селекции сигналов цели, поскольку принцип действия его основан на получении информации о дальности только по времени запаздывания отраженного сигналов.
Известны также технические решения, которые предложены в устройстве импульсно-доплеровской локации для обнаружения целей в контролируемой зоне селекции по дальности и определения их параметров движения, описанные в патентах [64-67] (наиболее подробно суть изобретения изложена в [67]). Данное устройство содержит (см. фиг. 1, [67]) антенну, высокочастотный (ВЧ) генератор с возможностью электрического управления частотой (генератор управляемый напряжением - ГУН), (ВЧ) смеситель, первый и второй управляемые переключатели ВЧ сигналов (УПВЧС), делитель мощности (ДМ) сигналов разностной частоты (РЧ), первый и второй квадратурные смесители сигналов РЧ, фазовращатель на два квадратурных выхода 0° и 90° опорного сигнала промежуточной частоты (ПЧ), первое и второе устройства выборки-хранения (УВХ), блок синхронизации и управления (БСУ). БСУ содержит тактовый генератор, выходы которого подключены к входу формирователя импульсов управления УПВЧС и частотой ВЧ генератора, а также к входу умножителя частоты опорного сигнала ПЧ.
Согласно описанию принципа действия способ импульсно-доплеровской локации устройства [67] заключается в том, что частоту выходных колебаний ВЧ генератора на время формирования зондирующих радиоимпульсов переключают на величину ПЧ относительно частоты колебаний в остальное время периода повторения зондирующих радиоимпульсов, когда колебания ВЧ генератора являются гетеродинными, излучают зондирующие радиоимпульсы в контролируемое пространство, принимают отраженные от цели радиоимпульсы и смешивают их с гетеродинными колебаниями ВЧ генератора, преобразуют принятые от цели радиоимпульсы в радиоимпульсы РЧ, смешивают последние в квадратурном смесителе с опорными колебаниями ПЧ, преобразуют радиоимпульсы РЧ в область низких доплеровских частот в виде квадратурных видеоимпульсов, затем выполняют выборку мгновенных значений квадратурных видеоимпульсов, и по значениям выборок получают информацию о наличии цели, дальности и параметрах ее перемещения.
При этом опорные колебания ПЧ получают умножением частоты выходных колебаний тактового генератора, этими же колебаниями тактового генератора синхронизируют моменты формирования зондирующих радиоимпульсов и переключения частоты ВЧ генератора.
Основной недостаток устройства [67] заключается в следующем. Колебания зондирующих радиоимпульсов и гетеродинные колебания, отличающиеся по частоте на величину ПЧ, генерируются одним и тем же ВЧ генератором во временной последовательности, то есть, оба сигнала никогда не присутствуют на выходе ВЧ генератора одновременно. Когерентность этих колебаний, которая задается тактовым генератором относительно моментов переключения частоты ВЧ генератора, из-за естественной нестабильности и непредсказуемых уходов частоты генерации нарушается с увеличением времени запаздывания отраженных от цели радиоимпульсов, то есть, дальности до цели. Это приводит к нелинейности в зависимости набега фазы колебаний отраженных радиоимпульсов от времени запаздывания, а также, как следствие, изменению значения РЧ сигнала на выходе ВЧ смесителя, снижению отношения сигнал/шум и искажениям видеоимпульсов на выходе квадратурного смесителя (см. описание и диаграммы фиг. 8, [67]). Отмеченные явления усиливаются с увеличением диапазона частот несущего излучения, особенно в диапазоне миллиметровых волн. Они являются причиной снижения предельной дальности действия СБРЛ, надежности обнаружения и точности определения параметров движения цели.
Дополнительными недостатками известного устройства [67] являются большое потребление тока по цепи питания, поскольку ВЧ генератор работает непрерывно. Наличие утечки излучения ВЧ генератора осложняет решение задачи электромагнитной совместимости и скрытности работы в условиях возросшего количества радиосредств. Конструктивная сложность ВЧ части устройства также относится к его недостатку. Указанные недостатки создают проблему применения устройства [67] в СБРЛ бортового исполнения. Например, в датчиках обнаружения цели в зоне контроля, а также в системах предотвращения столкновений транспортных средств.
Наиболее близким аналогом (прототипом) по технической сущности, принципу действия и достигаемому положительному эффекту являются способ и устройство, описанные в патенте RU2803413C1, опубл. 12.09.2023, бюл. 26. Заявка 2023101609 от 26.01.2023. МПК G01S13/18, G01S13/34, G01S13/42, G01S13/53, G01S7/228. Способ импульсно-доплеровской радиолокации и устройство с автодинным приёмопередатчиком для его реализации / В.Я. Носков, Р.Г. Галеев, Е.В. Богатырев, К.А. Игнатков, Д.С. Вишняков [68].
Способ импульсно-доплеровской радиолокации прототипа заключается в том, что на ВЧ генератор ударно воздействуют последовательностью парных импульсов запуска с крутыми фронтами, формируют при этом в ВЧ генераторе в течение каждого радиоимпульса когерентные относительно частоты запускающих импульсов колебания, причем частоту первых радиоимпульсов каждой пары смещают относительно частоты вторых радиоимпульсов на величину ПЧ, облучают контролируемое пространство сформированными в ВЧ генераторе радиоимпульсами, принимают отраженные от находящейся в этом пространстве цели первые радиоимпульсы каждой пары и воздействуют ими на ВЧ генератор во время формирования в нем второго радиоимпульса, смешивают колебания принятого радиоимпульса с собственными колебаниями ВЧ генератора, вызывая в нем автодинные изменения амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора с разностной частотой (РЧ), выделяют автодинные изменения в виде радиоимпульсов РЧ, смешивают их с опорными колебаниями ПЧ в квадратурном смесителе, преобразуют радиоимпульсы РЧ в область низких доплеровских частот в виде квадратурных видеоимпульсов, затем выполняют выборку мгновенных значений квадратурных видеоимпульсов, и по значениям выборок далее получают информацию о наличии цели, дальности и параметрах ее перемещения.
Устройство с автодинным приёмопередатчиком для систем импульсно-доплеровской радиолокации прототипа содержит антенну, ВЧ генератор, выполненный с возможностью электрического управления частотой генерации, блок выделения автодинного сигнала, делитель мощности (ДМ) сигналов РЧ, первый и второй смесители, фазовращатель на два квадратурных выхода сигналов опорной ПЧ, первое и второе устройства выборки-хранения, а также программируемый блок синхронизации и управления (ПБСУ), генератор импульсов ударного возбуждения (ГИУВ), причем высокочастотный порт ВЧ генератора присоединен к антенне, выходы делителя мощности присоединены к сигнальным входам первого и второго смесителей, первый выход ПБСУ подключен к управляющему входу частотой ВЧ генератора, а третий выход подключен к входу фазовращателя, квадратурные выходы которого подключены к гетеродинным входам первого и второго смесителей, при этом выходы последних подключены к сигнальным входам устройств выборки-хранения, между вторым выходом ПБСУ и входом запуска ВЧ генератора введен ГИУВ, а между ВЧ генератором и делителем мощности введен блок выделения автодинного сигнала. ПБСУ содержит тактовый генератор, выходы которого подключены к входам программируемых умножителя и делителя частоты, а также селектор импульсов на три входа.
Недостатком прототипа является наличие «мертвой зоны» в непосредственной близости от СБРЛ, ограниченной длительностью зондирующего радиоимпульса и временем восстановления ВЧ генератора. Как показано выше, наличие ближней зоны селекции цели в непосредственной близости от СБРЛ для обнаружения и определения параметров движения целей востребовано для многих приложений.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в необходимости расширения функциональных возможностей прототипа путем исключения «мертвой зоны» в непосредственной близости от СБРЛ и формирования в этом диапазоне дальностей второй (ближней) рабочей зоны селекции, обеспечивающей обнаружение и определение параметров движения цели в непосредственной близости от СБРЛ при сохранении дальней зоны селекции и функциональных возможностей прототипа.
Суть технического предложения состоит в следующем. В автодинном генераторе под воздействием импульсов запуска, также как в прототипе, формируется последовательность из некратных пар радиоимпульсов, причем частота первого радиоимпульса относительно частоты второго радиоимпульса смещена на величину ПЧ. В этих парах первый радиоимпульс является зондирующим при формировании как ближней, так и дальней зон, а второй - приемным (гетеродинным) при формировании только дальней зоны селекции. Прием отраженного радиоимпульса в первой зоне селекции автодином осуществляется в процессе генерации первого зондирующего радиоимпульса, а сигнала второй зоны селекции - при генерации второго радиоимпульса. Получаемые при этом автодинные сигналы разделяются на два канала при помощи электронного коммутатора. Когерентность колебаний формируемых радиоимпульсов обеспечивается также, как у прототипа, ударным возбуждением ВЧ генератора, при котором импульсом запуска с крутым фронтом навязываются начальные фаза и амплитуда колебаний, а частота генерации становится кратной частоте повторения импульсов с пониженным уровнем шума (см. авт. свидетельство SU1292161A1 [69] и стр. 37-40 в книге [70]).
Решение указанной проблемы достигается тем, что предложен способ импульсно-доплеровской радиолокации для контроля двух зон селекции цели по дальности, заключающийся в том, что на ВЧ генератор ударно воздействуют последовательностью парных импульсов запуска с крутыми фронтами, формируют при этом в ВЧ генераторе в течение каждого радиоимпульса когерентные относительно частоты запускающих импульсов колебания, причем частоту первых радиоимпульсов каждой пары смещают относительно частоты вторых радиоимпульсов на величину промежуточной частоты (ПЧ), облучают контролируемое пространство сформированными в ВЧ генераторе зондирующими радиоимпульсами, принимают отраженные от находящихся в ближней и дальней зонах целей первые и вторые радиоимпульсы, полученные от первого зондирующего радиоимпульса каждой пары, и воздействуют ими на ВЧ генератор во время формирования в нем первого и второго радиоимпульсов соответственно, вызывая в нем автодинные изменения амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора, выделяют автодинные изменения в виде видеоимпульсов ближней зоны селекции во время формирования первого зондирующего радиоимпульса и в виде радиоимпульсов разностной частоты (РЧ) во время формирования второго зондирующего радиоимпульса, смешивают радиоимпульсы РЧ с опорными колебаниями ПЧ в смесителе, преобразуя радиоимпульсы РЧ в область низких доплеровских частот в виде видеоимпульсов дальней зоны селекции, затем раздельно выполняют выборку мгновенных значений первых и вторых видеоимпульсов, и по значениям выборок получают информацию о наличии целей в ближней и дальней зонах селекции, а также расстояния и параметрах их перемещения.
Предложено устройство с автодинным приёмопередатчиком для контроля двух зон селекции цели по дальности, содержащее антенну, ВЧ генератор, выполненный с возможностью электрического управления частотой генерации, устройство выделения автодинного сигнала, смеситель, первое и второе устройства выборки-хранения (УВХ), генератор импульсов ударного возбуждения (ГИУВ), а также программируемый блок синхронизации и управления (ПБСУ), причем высокочастотный порт ВЧ генератора присоединен к антенне, устройство выделения автодинного сигнала связано с ВЧ генератором, первый вывод ПБСУ подключен к управляющему входу частотой ВЧ генератора, между вторым выводом ПБСУ и входом запуска ВЧ генератора введен ГИУВ, третий вывод ПБСУ подключен к гетеродинному входу смесителя, выход которого подключен к входу первого УВХ, для решения указанной проблемы к сигнальному выходу устройства выделения автодинного сигнала подключен сигнальный вход коммутатора сигналов (КС), первый выход которого подключен к входу смесителя, второй выход - к входу второго УВХ, а вход управления КС - к первому выводу ПБСУ, при этом входы управления первого и второго УВХ подключены к четвертому и пятому выводам ПБСУ соответственно.
Выполненный анализ уровня техники в области применения автодинов в качестве приемопередатчиков в импульсно-доплеровских радиолокаторах показал, что известные устройства-аналоги [60,61] и прототип по своей сути и принципу действия, а также достигаемым техническим показателям существенно отличаются от предлагаемого технического решения и не могут быть противопоставлены заявляемому устройству. Были рассмотрены также альтернативные решения в данной и смежных областях (см. стр. 279-285, рис. 9.5, 9.6 [71]; стр. 164-169, [72]; стр. 517-530, рис. 11.4, 11.5 [73]; [74,75]). В результате установлено, что известные устройства импульсно-доплеровской радиолокации выполнены преимущественно на основе отдельных узлов передатчика и приёмника. Следовательно, предлагаемое техническое решение обладает новизной, поскольку авторам неизвестны устройства аналогичного назначения, содержащие признаки, которые фигурируют в предлагаемом изобретении в качестве отличительных признаков.
Анализ результатов патентного поиска показал, что предлагаемое решение не следует явным образом из уровня техники. Отсюда следует, что поиск не выявил известность влияния существенных признаков заявляемого технического решения на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности «изобретательский уровень».
Изобретение направлено на улучшение параметров и характеристик СБРЛ, предназначенных для решения широкого круга задач обнаружения, измерения дальности и определения параметров движения целей. Решение этих задач востребовано во многих отраслях человеческой деятельности, например, в системах контроля технологических параметров в производстве и на транспорте, в сельском хозяйстве и медицине, в системах безопасности и военном деле, в робототехнике, технологиях бесконтактной сенсорики объектов и научных исследованиях, что необходимо для удовлетворения все возрастающих потребностей человека. Таким образом, заявляемое изобретение соответствует критерию «промышленная применимость».
Сущность изобретения поясняется чертежами.
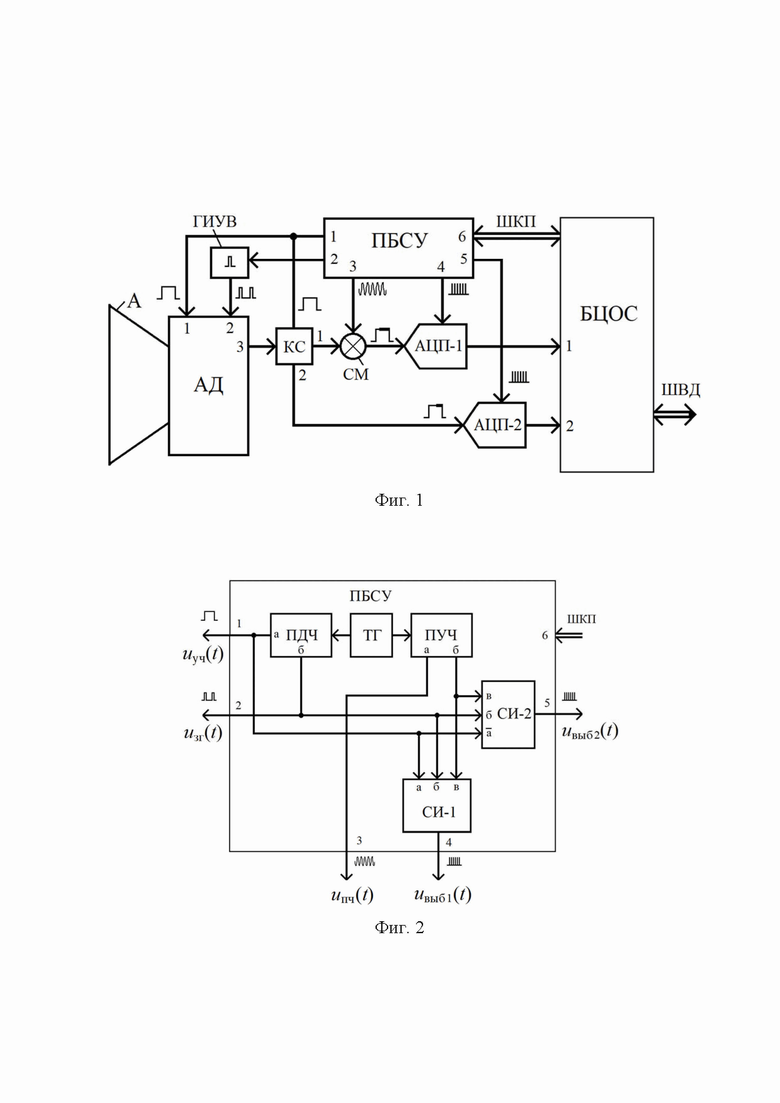
На фиг. 1 представлена структурная схема устройства с автодинным приёмопередатчиком для систем импульсно-доплеровской радиолокации с двумя зонами селекции цели по дальности.
На фиг. 2 представлена структурная схема варианта выполнения программируемого блока синхронизации и управления.
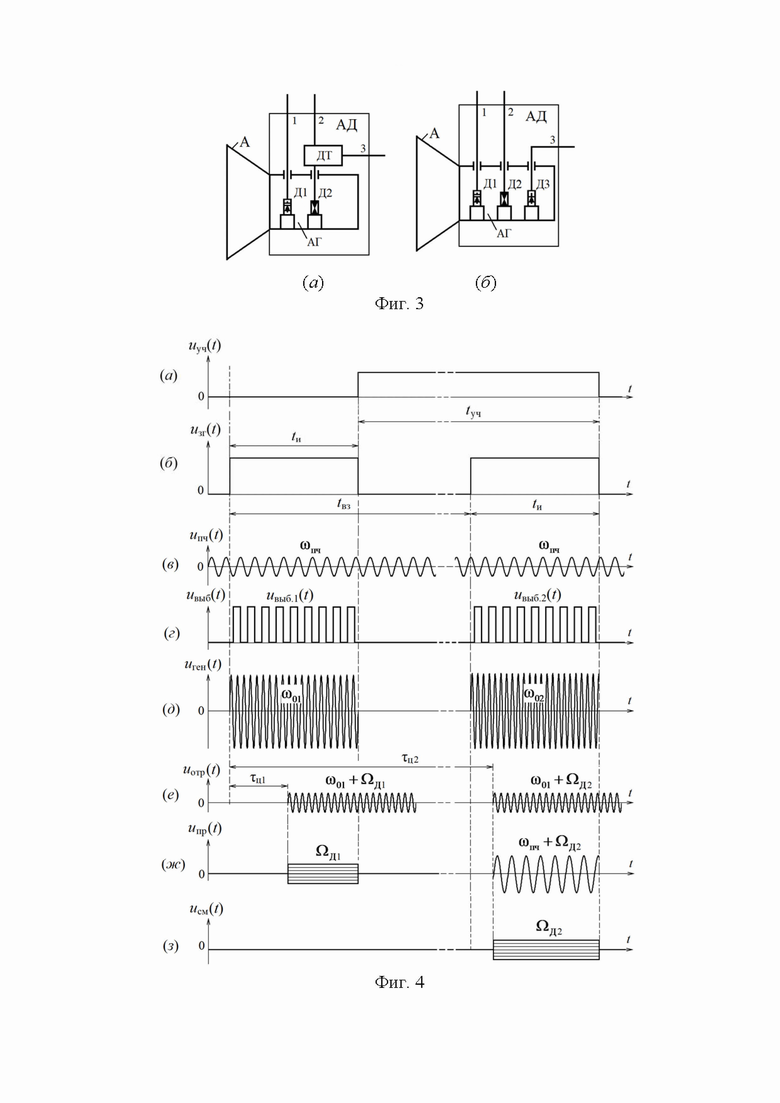
На фиг. 3 представлены варианты выполнения автодина (АД) с выделением автодинного сигнала по изменению тока в цепи питания автодинного генератора (АГ) (а) и по изменению амплитуды колебаний (б).
На фиг. 4 представлены временные диаграммы сигналов в характерных точках устройства с автодинным приёмопередатчиком для систем импульсно-доплеровской радиолокации с двумя зонами селекции цели по дальности: (а) - выходное напряжение управления частотой автодинного генератора и коммутатором сигналов; (б) - выходное напряжение генератора импульсов ударного возбуждения автодинного генератора; (в) - опорные колебания промежуточной частоты; (г) - выходные пачки импульсов синхронизации выборок первого и второго АЦП-1 и АЦП-2; (д) - выходные колебания автодинного генератора при формировании пар радиоимпульсов на первой  и второй
и второй  частотах соответственно; (е) - колебания отраженных от целей радиоимпульсов; (ж) - преобразованный сигнал на выходе автодина; (з) -сигнал на выходе смесителя.
частотах соответственно; (е) - колебания отраженных от целей радиоимпульсов; (ж) - преобразованный сигнал на выходе автодина; (з) -сигнал на выходе смесителя.
Суть предложенного способа импульсно-доплеровской радиолокации для контроля двух зон селекции цели по дальности будет рассмотрена ниже при описании работы устройства.
Устройство с автодинным приёмопередатчиком для контроля двух зон селекции цели по дальности (см. фиг. 1) содержит антенну А, автодинный приемопередатчик (или просто автодин - АД), выполненный на основе ВЧ генератора с возможностью электрического управления частотой генерации, коммутатор сигналов КС, смеситель СМ, первый АЦП-1 и второй АЦП-2 аналого-цифровые преобразователи, выполняющие функции устройств выборки и хранения, программируемый блок синхронизации и управления ПБСУ, а также блок цифровой обработки сигналов БЦОС.
Антенна А присоединена к высокочастотному порту автодина АД, а его вывод (под цифрой 3) автодинного сигнала подключен к входу коммутатора сигналов КС, первый выход которого присоединен к сигнальному входу смесителя СМ, а второй - к сигнальному входу второго АЦП-2, выход смесителя СМ присоединен к сигнальному входу первого АЦП-1, а выходы АЦП-1 и АЦП-2 подключены к сигнальным входам блока цифровой обработки сигналов БЦОС. Первый вывод программируемого блока синхронизации и управления ПБСУ подключен к входу (под цифрой 1) управления частотой генерации автодина АД и входу управления коммутатором сигналов КС, второй вывод ПБСУ через генератор импульсов ударного возбуждения ГИУВ связан с входом (под цифрой 2) запуска автодина АД, третий вывод ПБСУ подключен к гетеродинному входу смесителя СМ, а четвертый и пятый выводы ПБСУ подключены к тактовым входам первого АЦП-1 и второго АЦП-2 соответственно. Кроме того, ПБСУ и БЦОС связаны между собой шиной команд программирования ШКП, а к выходу БЦОС подключена шина выходных данных ШВД для связи с конечным потребителем, например, бортовым компьютером (на фиг. 1 не показан).
Программируемый блок синхронизации и управления ПБСУ содержит первый, второй, третий, четвертый и пятый выводы, а также приемопередающий порт (под цифрой 6) шины команд программирования ШКП, тактовый генератор, подключенный к входам программируемых умножителя (ПУЧ) и делителя (ПДЧ) частоты, а также первый селектор импульсов на три входа «а», «б» и «в», второй селектор импульсов на три входа « », «б» и «в», где вход «» является инвертирующим, выходы «а» ПДЧ, «б» ПДЧ и «б» ПУЧ по отдельности соответственно подключены к входам «а», «б» и «в» первого селектора импульсов, и к входам «», «б» и «в» второго селектора импульсов, при этом первый, второй, третий, четвертый и пятый выводы ПБСУ подключены к выходам «а» ПДЧ, «б» ПДЧ, «а» ПУЧ и выходам первого и второго селекторов импульсов на три входа соответственно.
», «б» и «в», где вход «» является инвертирующим, выходы «а» ПДЧ, «б» ПДЧ и «б» ПУЧ по отдельности соответственно подключены к входам «а», «б» и «в» первого селектора импульсов, и к входам «», «б» и «в» второго селектора импульсов, при этом первый, второй, третий, четвертый и пятый выводы ПБСУ подключены к выходам «а» ПДЧ, «б» ПДЧ, «а» ПУЧ и выходам первого и второго селекторов импульсов на три входа соответственно.
БЦОС содержит сигнальный процессор и шинные приемопередатчики (на фиг. 1 не показаны), которые посредством шины команд программирования ШКП и шины выходных данных ШВД связаны с ПБСУ и конечным потребителем данных соответственно (см. фиг. 1).
Автодин АД (см. фиг. 3а и 3б) содержит автодинный генератор АГ, выполненный, например, на основе генераторного диода Д2 (диода Ганна или лавинно-пролётного диода), помещенного в резонансную систему (резонатор) АГ, и устройство выделения автодинного сигнала. Варианты выполнения АД на основе генераторных диодов с устройством выделения автодинного сигнала по первому варианту (в цепи питания) описаны в статье [76] (см. рис. 14 и рис. 21). Устройство выделения автодинного сигнала может быть выполнено в виде широкополосного датчика тока ДТ, включенного между выводом диода Д2 и вторым выводом автодина АД (см. фиг. 3а). В качестве датчиков тока обычно используются последовательно подключенные в цепь питания резистор, индуктивность, трансформатор тока, колебательный контур, схема с трансформаторно-емкостной связью контуров (см. рис. 74, монографии [77]) или электронная схема на основе транзисторов и интегральных усилителей (см. рис. 15, 16 [76]). В патенте [53] (см. фигуры 1, 4 и 5) для повышения быстродействия и, соответственно, расширения полосы частот автодинного сигнала предложено применение схемы делителя Вилкинсона, образованной микрополосковыми линиями.
Устройство выделения автодинного сигнала по второму варианту может быть выполнено на основе детекторного диода Д3, помещенного в колебательную систему (резонатор) АГ (см. фиг. 3б) или в связанную с резонатором передающую линию, как показано на фиг. 2 патента РФ RU2295911С1 (опубл. 27.03.2007, бюл. № 9) и на рис. 6а и 9а статьи [76]. Для обеспечения электрической перестройки частоты генерации в резонатор АГ может быть помещён варикап Д1 (см. стр. 80-84, [78]). Запуск АГ на диоде Ганна производится подачей импульса напряжения в цепь питания (см. рис. 15, [79], патент [53]), а ЛПД - импульса тока (см. рис. 22, [76]). Выход устройства выделения автодинного сигнала подключен к третьему выводу АД. Электрическое управление частотой генерации АД через его первый вывод в обоих вариантах осуществляется посредством варикапа Д1, помещенного в колебательную систему АГ.
Автодин АД может быть выполнен также в виде генераторного модуля на основе одного или нескольких транзисторов, в цепь питания которых последовательно подключен резистор или электронная схема преобразования автодинных изменений тока в напряжение автодинного сигнала (см., например, фигуры с 18 по 23 патента [39]). Для перестройки частоты в резонансную систему генератора обычно подключается варикап (см. фиг. 44с, 45с, [39]). Ударный запуск генератора может осуществляться по цепи питания генератора (см. фиг. 43, [39]), а также по цепям управления усилителей, выполненных на биполярных или полевых транзисторах [79, 80].
Генератор импульсов ударного возбуждения ГИУВ, предназначенный для формирования импульсов запуска с крутым фронтом пикосекундной длительности, служит для получения в АГ когерентных колебаний радиоимпульсов. Для этого длительность фронта выходных импульсов ГИУВ в зоне перехода к инкрементному режиму работы радиоимпульсного АГ [81] должна быть не более половины периода ВЧ колебаний АГ, а амплитуда их - не менее чем на порядок выше уровня шумов (см. раздел 5.6. «Примерный порядок проектирования и расчета РПЧ», стр. 103-108, книги [70]).
Исследования радиоимпульсных генераторов на диодах Ганна 3-см диапазона длин волн показали, что условия когерентности радиоимпульсов выполняются при запуске импульсами с продолжительностью фронта около 50 пикосекунд и амплитудой ударного возбуждения во время прохождения порогового напряжения диода Ганна не менее 0,01 Вольт [82]. При этом получено снижение частотных шумов по сравнению с шумами в режиме непрерывной генерации на 35 дБ на расстоянии 1 кГц от несущей. Амплитудные шумы в режиме радиоимпульсного умножения частоты снижаются на 2…2,5 дБ. Для радиоимпульсных генераторов на ЛПД подавление частотных шумов достигает 50 дБ [83]. Результаты исследований фазовой стабильности колебаний в радиоимпульсных генераторах на диодах Ганна показали, что при длительностях фронта запускающих импульсов менее 2 нс независимые по цепям СВЧ генераторы на диодах Ганна позволяют получить нестабильность (расхождение) начальной фазы 2-2,5° при длительности наблюдения 200 нс [84, 85].
Технические решения создания ГИУВ широко известны (см. главу 7.8. «Формирователи и генераторы импульсов с пикосекундными фронтами», стр. 118-136, пособия [86]; раздел 3.4. «Источники зондирующих радиоимпульсных сигналов», стр. 108-114, монографии [87]). ГИУВ могут быть выполнены на основе линии передачи, туннельных диодов, коммутируемых разрядных линий, лавинных S-диодов и S-транзисторов, оптоэлектронных формирователей, диодов с накоплением заряда (ДНЗ), дрейфовых диодов, быстродействующих транзисторов и интегральных схем. Расчет генератора субнаносекундных импульсов на основе ДНЗ, изложен в [88], а примеры их применения в ГИУВ для радиоимпульсных генераторов, выполненных на диодах Ганна и полевых транзисторах, приведены в описаниях к патентам [69,79]. ГИУВ для радиоимпульсных генераторов на диодах Ганна, выполненные на лавинных транзисторах и S-диодах представлены на рис. 3.7, 3.8 и 3.9 монографии [87].
Антенна А может иметь различное исполнение, зависящее от требований к диаграмме направленности и рабочего диапазона частот, например, в виде щелевого или полоскового вибратора, рупорной, диэлектрической стержневой, спиральной антенны или типа «волновой канал» (см. соответственно стр. 115, 149, 218, 239, 260, [89]).
Коммутатор сигналов КС может быть выполнен на микросхеме аналогового переключателя, например, К561КТ3 (см. стр. 229, рис. 2.27, [90]).
Смеситель СМ может быть выполнены на полупроводниковых диодах по схеме балансного преобразователя частоты (см. стр. 102, рис. 5.26, [91]).
Программируемый блок синхронизации и управления ПБСУ может быть выполнен на базе «жесткой» логики, программируемых логических интегральных схем (ПЛИС) или с применением специализированных микросхем и иметь различное функциональное построение. Один из примеров «гибкого» выполнения ПБСУ представлен на структурной схеме фиг. 2. Данная схема является виртуальной, реализована на микросхеме Si5368, содержащей опорный тактовый генератор и два независимых программируемых умножителей/делителей частоты и формирователей импульсов с низким джиттером (дрожанием) фазы выходных колебаний в диапазоне частот от 2 кГц до 1,4 ГГц (см. сайт фирмы Silicon Laboratories: http://www.silabs.com). ПБСУ содержит тактовый генератор ТГ, программируемые умножитель ПУЧ и делитель ПДЧ частоты, а также селекторы импульсов СИ-1 и СИ-2 на три входа. При этом выход тактового генератора ТГ подключен к входам ПУЧ и ПДЧ, а программируемые выходы «а» и «б» ПДЧ и «б» ПУЧ подключены к входам «а», «б» и «в» первого селектора импульсов СИ-1 на три входа и входам « », «б» и «в» второго селектора импульсов СИ-2 на три входа, где вход «» является инвертирующим. Для связи с другими блоками ПБСУ содержит с первого по пятый выводы, которые связаны с программируемыми выходами «а» ПДЧ, «б» ПДЧ, «а» ПУЧ, с выходами первого и второго селекторов импульсов СИ-1 и СИ-2 соответственно. Приемопередающий порт под цифрой 6 ПБСУ связан с выводами программирования микросхемы Si5368 и предназначен для подключения шины команд программирования ШКП для связи с БЦОС.
», «б» и «в» второго селектора импульсов СИ-2 на три входа, где вход «» является инвертирующим. Для связи с другими блоками ПБСУ содержит с первого по пятый выводы, которые связаны с программируемыми выходами «а» ПДЧ, «б» ПДЧ, «а» ПУЧ, с выходами первого и второго селекторов импульсов СИ-1 и СИ-2 соответственно. Приемопередающий порт под цифрой 6 ПБСУ связан с выводами программирования микросхемы Si5368 и предназначен для подключения шины команд программирования ШКП для связи с БЦОС.
В качестве первого и второго АЦП, выполняющих функции УВХ, предпочтительно использование микросхем быстродействующих АЦП [92,93]. Например, микросхема AD9689 фирмы «Analog Devices» представляет собой двойной 14-разрядный АЦП с интерфейсом JESD204B, быстродействием 2,6 Гбайт/с (см. сайт: https://www.analog.com/ru/products/ad9689.html#product-overview). Этот АЦП способен осуществлять прямую выборку аналоговых сигналов с шириной полосы пропускания по уровню -3 дБ до 9 ГГц. Аналогичные по параметрам АЦП типа DAC38RF82 и DAC38RF89 выпускаются фирмой Texas Instruments.
Блок цифровой обработки сигналов БЦОС (см. фиг. 1) не является предметом настоящего изобретения. Он может быть выполнен на основе сигнального процессора, например, контроллера семейства MSP430Х1ХХ [94]. Контроллер содержит: постоянное запоминающее устройство (ПЗУ), хранящее программу обработки сигналов; высокоскоростное вычислительное ядро, выполняющее функции цифровой обработки сигнала (спектральный анализ, цифровую фильтрацию сигнала и формирование данных, индикации); оперативное запоминающее устройство (ОЗУ), выполняющее функции запоминания текущих значений и результатов отработки сигналов; приемопередатчики шин последовательного порта для передачи и обмена информацией по шине команд программирования ШКП с ПБСУ и по шине выходных данных ШВД с конечным потребителем - бортовым компьютером.
Необходимо отметить, что в состав предлагаемого устройства могут входить дополнительные или иные элементы, не изменяющие суть изобретения. Например, перед коммутатором сигналов КС может быть установлен обычный или малошумящий широкополосный усилитель, а после смесителя СМ - полосовой усилитель ПЧ (см. стр. 60, рис. 4.3б, [91]).
Устройство с автодинным приёмопередатчиком для контроля двух зон селекции цели по дальности работает следующим образом.
После подачи напряжения питания на устройство в БЦОС (см. фиг. 1) в соответствие с алгоритмом его работы вычислительное ядро включает команду «Инициализация» [94], по которой производится настройка периферийных устройств, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода из низкопроизводительного ПЗУ в высокопроизводительное ОЗУ и подача в ПБСУ по шине ШКП команд, устанавливающих коэффициенты умножения и деления, а также алгоритм формирования сигналов синхронизации и управления.
После прохождения команд программирования в ПБСУ (см. фиг. 2) производится запуск тактового генератора ТГ. Выходные импульсы ТГ поступают на программируемые делитель ПДЧ и умножитель ПУЧ частоты. На выходе «а» ПДЧ формируются импульсы  управления частотой генерации автодина (см. эпюру «а» на фиг. 4), поступающие на первый вывод ПБСУ и на входы «а» и «
управления частотой генерации автодина (см. эпюру «а» на фиг. 4), поступающие на первый вывод ПБСУ и на входы «а» и « » первого и второго селекторов импульсов СИ-1 и СИ-2 соответственно. На выходе «б» ПДЧ формируются периодические пары импульсов
» первого и второго селекторов импульсов СИ-1 и СИ-2 соответственно. На выходе «б» ПДЧ формируются периодические пары импульсов  запуска генерации автодина (см. эпюру «б» на фиг. 4), имеющие длительность
запуска генерации автодина (см. эпюру «б» на фиг. 4), имеющие длительность  , которые поступают на второй вывод ПБСУ и на входы «б» первого и второго селекторов импульсов СИ-1 и СИ-2. На выходе «а» ПУЧ формируются гармонические колебания
, которые поступают на второй вывод ПБСУ и на входы «б» первого и второго селекторов импульсов СИ-1 и СИ-2. На выходе «а» ПУЧ формируются гармонические колебания  ПЧ (см. эпюру «в» на фиг. 4), поступающие на третий вывод ПБСУ. На выходе «б» ПУЧ формируются тактовые импульсы для первого и второго АЦП-1 и АЦП-2, которые поступают на входы «в» первого и второго селекторов импульсов СИ-1 и СИ-2. С выходов первого и второго селекторов импульсов СИ-1 и СИ-2 пачки импульсов синхронизации
ПЧ (см. эпюру «в» на фиг. 4), поступающие на третий вывод ПБСУ. На выходе «б» ПУЧ формируются тактовые импульсы для первого и второго АЦП-1 и АЦП-2, которые поступают на входы «в» первого и второго селекторов импульсов СИ-1 и СИ-2. С выходов первого и второго селекторов импульсов СИ-1 и СИ-2 пачки импульсов синхронизации  и
и  выборок (см. эпюру «г» на фиг. 4) поступают на четвертый и пятый выводы ПБСУ соответственно.
выборок (см. эпюру «г» на фиг. 4) поступают на четвертый и пятый выводы ПБСУ соответственно.
Как видно из эпюры «а» на фиг. 4, формирование импульсов управления частотой генерации автодина в каждой паре начинается сразу за срезом первого импульса запуска генерации автодина (см. эпюру «б» на фиг. 4) и завершается после среза второго импульса запуска. Данные импульсы с первого вывода ПБСУ (см. фиг. 1) поступают на вход (обозначен цифрой 1) управления частотой автодина. Поэтому возбуждаемые в автодине АД под воздействием генератора импульсов ударного возбуждения ГИУВ радиоимпульсы  каждой пары имеют разную частоту генерации. В первом радиоимпульсе пары возбуждаются колебания на частоте
каждой пары имеют разную частоту генерации. В первом радиоимпульсе пары возбуждаются колебания на частоте  , а вторые - на частоте
, а вторые - на частоте  (см. эпюру «д» на фиг. 4). Длительность
(см. эпюру «д» на фиг. 4). Длительность  импульсов управления частотой соответствует времени задержки
импульсов управления частотой соответствует времени задержки  второго радиоимпульса пары относительно ее первого радиоимпульса. При этом очевидно, что период
второго радиоимпульса пары относительно ее первого радиоимпульса. При этом очевидно, что период  повторения пар радиоимпульсов для сохранения однозначности определения расстояния до цели должен превышать максимальное время запаздывания
повторения пар радиоимпульсов для сохранения однозначности определения расстояния до цели должен превышать максимальное время запаздывания  отраженного от цели радиоимпульса дальней зоны селекции цели
отраженного от цели радиоимпульса дальней зоны селекции цели  , где
, где  - максимальное расстояние до цели дальней зоны селекции;
- максимальное расстояние до цели дальней зоны селекции;  - скорость распространения электромагнитного излучения. Кроме того, исключения паразитных выбросов функции неопределенности и, соответственно, ложных зон селекции целей, следует избегать кратности соотношения периода повторения пар радиоимпульсов и временного интервала между ними. Пачки импульсов синхронизации
- скорость распространения электромагнитного излучения. Кроме того, исключения паразитных выбросов функции неопределенности и, соответственно, ложных зон селекции целей, следует избегать кратности соотношения периода повторения пар радиоимпульсов и временного интервала между ними. Пачки импульсов синхронизации  выборок для первого
выборок для первого  и второго
и второго  АЦП-1 и АЦП-2 (см. эпюру «г» на фиг. 4) имеют место только во время формирования первого и второго радиоимпульсов соответственно каждой пары.
АЦП-1 и АЦП-2 (см. эпюру «г» на фиг. 4) имеют место только во время формирования первого и второго радиоимпульсов соответственно каждой пары.
Периодическая некратная последовательность парных импульсов запуска генерации автодина (см. эпюру «б» на фиг. 4) со второго вывода ПБСУ после формирования в ГИУВ импульсов с пикосекундными фронтами поступает на вход (обозначен цифрой 2) запуска АД. Первые в парах импульсы обеспечивают в автодинном генераторе АГ условия возбуждения когерентных колебаний на частоте  , например,
, например,  , определяемой величиной напряжения
, определяемой величиной напряжения  на варикапе АГ. Формируемые при этом радиоимпульсы
на варикапе АГ. Формируемые при этом радиоимпульсы  генерации (см. эпюру «д» на фиг 4), преобразуются антенной А в электромагнитное излучение, которое в соответствие с ее диаграммой направленности посылается в контролируемое пространство в качестве зондирующего радиосигнала
генерации (см. эпюру «д» на фиг 4), преобразуются антенной А в электромагнитное излучение, которое в соответствие с ее диаграммой направленности посылается в контролируемое пространство в качестве зондирующего радиосигнала  . Выражение для этого радиосигнала имеет вид:
. Выражение для этого радиосигнала имеет вид:
 , (1)
, (1)
где
 - амплитуда зондирующего радиосигнала;
- амплитуда зондирующего радиосигнала;
 - прямоугольная огибающая зондирующего радиосигнала;
- прямоугольная огибающая зондирующего радиосигнала;
 - круговая частота излучения зондирующего радиосигнала;
- круговая частота излучения зондирующего радиосигнала;
 - целое число, коэффициент умножения частоты зондирующего радиосигнала;
- целое число, коэффициент умножения частоты зондирующего радиосигнала;
 - круговая частота тактового генератора;
- круговая частота тактового генератора;
 и
и  - длительность зондирующих радиоимпульсов и период их повторения соответственно;
- длительность зондирующих радиоимпульсов и период их повторения соответственно;
 - начальная фаза
- начальная фаза  -го радиоимпульса, навязанная запускающим импульсом;
-го радиоимпульса, навязанная запускающим импульсом;
 - целое число, порядковый номер зондирующего радиоимпульса.
- целое число, порядковый номер зондирующего радиоимпульса.
После завершения процесса формирования первого (зондирующего) радиоимпульса каждой пары под воздействием подаваемых на варикап импульсов управления частотой (см. эпюру «а» на фиг 4) генерации производится переключение собственной частоты резонансной системы (резонатора) АГ на частоту  . Задержанные на время
. Задержанные на время  задержки импульсы запуска вторых радиоимпульсов пар обеспечивают в АГ условия возбуждения когерентных колебаний на частоте
задержки импульсы запуска вторых радиоимпульсов пар обеспечивают в АГ условия возбуждения когерентных колебаний на частоте  , например,
, например,  . Формируемые при этом радиоимпульсы генерации (см. эпюру «д» на фиг 4), также излучаются антенной А в соответствие с ее диаграммой направленности в контролируемое пространство, но не используются в качестве зондирующих сигналов. Эти радиоимпульсы условно назовем приемными
. Формируемые при этом радиоимпульсы генерации (см. эпюру «д» на фиг 4), также излучаются антенной А в соответствие с ее диаграммой направленности в контролируемое пространство, но не используются в качестве зондирующих сигналов. Эти радиоимпульсы условно назовем приемными  , поскольку во время их формирования выполняется прием отраженных от целей в дальней зоне селекции и их выделение устройствами выделения сигналов. Выражение для формируемых в АГ приемных радиоимпульсов имеет вид:
, поскольку во время их формирования выполняется прием отраженных от целей в дальней зоне селекции и их выделение устройствами выделения сигналов. Выражение для формируемых в АГ приемных радиоимпульсов имеет вид:
 , (2)
, (2)
где
- амплитуда приемного радиосигнала;
 - единичная функция огибающей приемного радиосигнала;
- единичная функция огибающей приемного радиосигнала;
 - круговая частота излучения приемного радиосигнала;
- круговая частота излучения приемного радиосигнала;
 - целое число, коэффициент умножения частоты приемного радиосигнала;
- целое число, коэффициент умножения частоты приемного радиосигнала;
- круговая частота тактового генератора;
и - длительность радиоимпульсов и период их повторения соответственно;
 - время задержки второго (приемного) радиоимпульса пары относительно первого;
- время задержки второго (приемного) радиоимпульса пары относительно первого;
 - начальная фаза -го радиоимпульса, навязанная запускающим импульсом;
- начальная фаза -го радиоимпульса, навязанная запускающим импульсом;
- целое число, порядковый номер приемного радиоимпульса.
После завершения процесса формирования второго (приемного) радиоимпульса каждой пары, под воздействием подаваемого на варикап импульса управления частотой (см. эпюру «а» на фиг 4) генерации производится переключение собственной частоты резонансной системы (резонатора) АГ на частоту  зондирующего радиоимпульса. Частоты зондирующего
зондирующего радиоимпульса. Частоты зондирующего  и приемного
и приемного  радиосигналов отличаются на величину
радиосигналов отличаются на величину  промежуточной частоты (
промежуточной частоты ( ), которая также кратна частоте тактового генератора ТГ, например
), которая также кратна частоте тактового генератора ТГ, например  . На частоте с третьего вывода ПБСУ на гетеродинный вход смесителя СМ поступают гармонические колебания (см. эпюру «в» на фиг. 4)
. На частоте с третьего вывода ПБСУ на гетеродинный вход смесителя СМ поступают гармонические колебания (см. эпюру «в» на фиг. 4)  , которые описываются следующим выражением:
, которые описываются следующим выражением:
 , (3)
, (3)
где
 - амплитуда сигнала промежуточной частоты;
- амплитуда сигнала промежуточной частоты;
 - промежуточная частота;
- промежуточная частота;
 - целое число, коэффициент умножения промежуточной частоты;
- целое число, коэффициент умножения промежуточной частоты;
- целое число, коэффициент умножения частоты зондирующего радиосигнала;
- целое число, коэффициент умножения частоты приемного радиосигнала.
В случае наличия в поле излучения антенны А в ближней и дальней зонах селекции целей (полагаем для простоты, что цели точечные) отраженное от них электромагнитное излучение принимается антенной А, преобразуется в электрические радиосигналы и воздействуют на автодинный генератор АД. (см. эпюру «е» на фиг. 4). Выражение для этих радиосигналов запишем в виде:
 , (4)
, (4)
 , (5)
, (5)
где
- амплитуда зондирующего радиосигнала;
 - безразмерные коэффициенты ослабления амплитуды излучаемого сигнала по пути распространения до ближней (первой) и дальней (второй) целей соответственно и обратно, приведенные к порту антенны А;
- безразмерные коэффициенты ослабления амплитуды излучаемого сигнала по пути распространения до ближней (первой) и дальней (второй) целей соответственно и обратно, приведенные к порту антенны А;
 ,
,  - времена запаздывания отраженного излучения от ближней (первой) и дальней (второй) целей, в общем случае переменные;
- времена запаздывания отраженного излучения от ближней (первой) и дальней (второй) целей, в общем случае переменные;
 ,
,  - текущие расстояния до ближней (первой) и дальней (второй) целей, в общем случае переменные;
- текущие расстояния до ближней (первой) и дальней (второй) целей, в общем случае переменные;
 - скорость распространения радиоволн;
- скорость распространения радиоволн;
- начальная фаза -го радиоимпульса, навязанная запускающим импульсом;
- целое число;
 ,
,  - фазовый сдвиг, связанный с отражающими свойствами ближней (первой) и дальней (второй) целей соответственно;
- фазовый сдвиг, связанный с отражающими свойствами ближней (первой) и дальней (второй) целей соответственно;
 - средняя мощность зондирующего радиоимпульса;
- средняя мощность зондирующего радиоимпульса;
 - минимальный обнаруживаемый (пороговый) сигнал;
- минимальный обнаруживаемый (пороговый) сигнал;
 - коэффициент усиления антенны А;
- коэффициент усиления антенны А;
 - длина волны излучения;
- длина волны излучения;
 ,
,  - эффективные площади рассеяния ближней (первой) и дальней (второй) целей;
- эффективные площади рассеяния ближней (первой) и дальней (второй) целей;
 - единичные функции для огибающих отраженных сигналов от ближней (первой) и дальней (второй) целей соответственно.
- единичные функции для огибающих отраженных сигналов от ближней (первой) и дальней (второй) целей соответственно.
При воздействии отраженных от целей радиосигналов на автодинный генератор АГ происходит «смешение» колебаний принятых антенной А радиоимпульсов с собственными колебаниями АГ и их нелинейное взаимодействие. Это взаимодействие вызывает в АГ автодинный эффект, который в зависимости от начальных условий проявляется по-разному.
В случае приема радиосигнала, отраженного от цели, находящейся в ближней зоне селекции, этот радиосигнал взаимодействует с собственными колебаниями АГ во время излучения зондирующего радиоимпульса, когда время  запаздывания отражённого радиосигнала меньше длительности зондирующих радиоимпульсов (
запаздывания отражённого радиосигнала меньше длительности зондирующих радиоимпульсов ( ) [57]. В этом случае, вследствие взаимной когерентности взаимодействующих колебаний, автодинный отклик АГ проявляется в формировании автодинного сигнала в виде видеоимпульсов длительностью
) [57]. В этом случае, вследствие взаимной когерентности взаимодействующих колебаний, автодинный отклик АГ проявляется в формировании автодинного сигнала в виде видеоимпульсов длительностью  в цепи питания автодинного генератора и/или на выходе амплитудного детектора, подключенного к колебательной системе автодина. Мгновенное значение амплитуды этих видеоимпульсов определяется разностью фаз излученных и отраженных радиосигналов.
в цепи питания автодинного генератора и/или на выходе амплитудного детектора, подключенного к колебательной системе автодина. Мгновенное значение амплитуды этих видеоимпульсов определяется разностью фаз излученных и отраженных радиосигналов.
Выделяемый в цепи питания (см. фиг. 3а) или посредством детекторного диода (см. фиг. 3б) преобразованный автодином сигнал  АД (см. левую эпюру «ж» на фиг. 4) описывается следующим выражением:
АД (см. левую эпюру «ж» на фиг. 4) описывается следующим выражением:
 , (6)
, (6)
где
 - амплитуда принятого от ближней цели радиосигнала;
- амплитуда принятого от ближней цели радиосигнала;
 - безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до ближней (первой) целей и обратно, приведенный к порту антенны А;
- безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до ближней (первой) целей и обратно, приведенный к порту антенны А;
 - коэффициент автодинного усиления АД, характеризующий передачу отраженного от цели сигнала в сигнал РЧ на выходе АД;
- коэффициент автодинного усиления АД, характеризующий передачу отраженного от цели сигнала в сигнал РЧ на выходе АД;
 - единичная функция преобразованного сигнала, полученного от цели в ближней зоне селекции по дальности;
- единичная функция преобразованного сигнала, полученного от цели в ближней зоне селекции по дальности;
 - набег фазы зондирующего излучения при его распространении до цели в ближней зоне селекции и обратно;
- набег фазы зондирующего излучения при его распространении до цели в ближней зоне селекции и обратно;
 - начальная фаза преобразованного сигнала;
- начальная фаза преобразованного сигнала;
 - время запаздывания отраженного излучения от цели в ближней зоне селекции;
- время запаздывания отраженного излучения от цели в ближней зоне селекции;
 - текущее расстояние до цели в ближней зоне селекции;
- текущее расстояние до цели в ближней зоне селекции;
- длительность зондирующих и приемных радиоимпульсов;
- период повторения спаренных радиоимпульсов;
- временной интервал между первым и вторым зондирующими радиоимпульсами пары;
 - шум автодинного генератора АГ, преобразованный на его выход.
- шум автодинного генератора АГ, преобразованный на его выход.
В случае приема радиосигнала, отраженного от цели, находящейся в дальней зоне селекции, этот радиосигнал на частоте  взаимодействует с собственными колебаниями АГ на частоте
взаимодействует с собственными колебаниями АГ на частоте  . В этом случае автодинный эффект в зависимости от соотношения величины разности частот
. В этом случае автодинный эффект в зависимости от соотношения величины разности частот  и полуширины полосы
и полуширины полосы  синхронизации АГ проявляется по-разному (см. стр. 13-24, [63]).
синхронизации АГ проявляется по-разному (см. стр. 13-24, [63]).
Величина полуширины полосы синхронизации АГ, как известно (см. стр. 257-262, формулу (5.73), [95]), определяется внутренними параметрами генератора и относительным уровнем воздействующего сигнала:
 , (7)
, (7)
где
- полуширина полосы синхронизации генератора;
 - безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до дальней (второй) цели и обратно, приведенный к порту антенны А;
- безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до дальней (второй) цели и обратно, приведенный к порту антенны А;
 - круговая частота излучения второго радиоимпульса пары;
- круговая частота излучения второго радиоимпульса пары;
 - внешняя добротность колебательной системы ВЧ генератора;
- внешняя добротность колебательной системы ВЧ генератора;
 - угол между линией прибора (активного элемента) генератора и его линией годографа импеданса колебательной системы и нагрузки (см. рис. 5.16, стр. 260, [95]);
- угол между линией прибора (активного элемента) генератора и его линией годографа импеданса колебательной системы и нагрузки (см. рис. 5.16, стр. 260, [95]);
 - коэффициент неизохронности генератора.
- коэффициент неизохронности генератора.
В результате расчета полуширины полосы синхронизации по формуле (7) при  на частоте
на частоте  ,
,  и
и  получаем
получаем  , т.е. 2 МГц.
, т.е. 2 МГц.
Если выбрать промежуточную частоту  в пределах полуширины полосы синхронизации , то происходит захват частоты ВЧ генератора воздействующим сигналом и процесс преобразования частоты отсутствует. В случае выполнения неравенства
в пределах полуширины полосы синхронизации , то происходит захват частоты ВЧ генератора воздействующим сигналом и процесс преобразования частоты отсутствует. В случае выполнения неравенства  в ВЧ генераторе наблюдается режим биений, который сопровождается амплитудно-частотной модуляцией колебаний генератора и значительными нелинейными искажениями автодинного сигнала [96]. В случае выполнения сильного неравенства
в ВЧ генераторе наблюдается режим биений, который сопровождается амплитудно-частотной модуляцией колебаний генератора и значительными нелинейными искажениями автодинного сигнала [96]. В случае выполнения сильного неравенства  в АГ наблюдаются квазигармонические изменения (биения) амплитуды и частоты колебаний, а также среднего значения тока и/или напряжения в цепи питания АГ с разностной частотой
в АГ наблюдаются квазигармонические изменения (биения) амплитуды и частоты колебаний, а также среднего значения тока и/или напряжения в цепи питания АГ с разностной частотой  . Проявление автодинного эффекта в этом случае напоминает явление преобразования частоты в обычных смесителях, поэтому автодины, в которых используется этот эффект называются автодинными преобразователями частоты, или, просто, автодинными (генерирующими) смесителями (Self oscillating mixer) [96-98]. Очевидно, что последнему условию удовлетворяет выбор промежуточной частоты порядка
. Проявление автодинного эффекта в этом случае напоминает явление преобразования частоты в обычных смесителях, поэтому автодины, в которых используется этот эффект называются автодинными преобразователями частоты, или, просто, автодинными (генерирующими) смесителями (Self oscillating mixer) [96-98]. Очевидно, что последнему условию удовлетворяет выбор промежуточной частоты порядка  , то есть 300 МГц. Улучшению «линейности» преобразования частоты способствует стабилизация частоты АГ посредством, например, применения в генераторе дополнительного высокодобротного резонатора, собственная частота которого управляется при помощи регулируемой емкости варакторного диода, варикапа или посредством переключаемых p-i-n-диодов (см. рис. 25, [99]; стр. 120-129, [100]).
, то есть 300 МГц. Улучшению «линейности» преобразования частоты способствует стабилизация частоты АГ посредством, например, применения в генераторе дополнительного высокодобротного резонатора, собственная частота которого управляется при помощи регулируемой емкости варакторного диода, варикапа или посредством переключаемых p-i-n-диодов (см. рис. 25, [99]; стр. 120-129, [100]).
Выделяемый в цепи питания (см. фиг. 3а) или посредством детекторного диода (см. фиг. 3б) преобразованный сигнал  АД (см. правую эпюру «ж» на фиг. 4) на разностной частоте описывается следующим выражением:
АД (см. правую эпюру «ж» на фиг. 4) на разностной частоте описывается следующим выражением:
 , (8)
, (8)
где
- амплитуда принятого радиосигнала от цели в дальней зоне;
- безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до дальней (второй) цели и обратно, приведенный к порту антенны А;
- коэффициент автодинного усиления АД, характеризующий передачу отраженного от цели сигнала в сигнал РЧ на выходе АД;
 - единичная функция преобразованного сигнала, полученного от цели в дальней зоне селекции;
- единичная функция преобразованного сигнала, полученного от цели в дальней зоне селекции;
 - набег фазы зондирующего излучения при его распространении до цели в дальней зоне селекции и обратно;
- набег фазы зондирующего излучения при его распространении до цели в дальней зоне селекции и обратно;
 - начальная фаза преобразованного сигнала;
- начальная фаза преобразованного сигнала;
 - разностная, в данном случае промежуточная частота преобразованного сигнала АД;
- разностная, в данном случае промежуточная частота преобразованного сигнала АД;
 - время запаздывания отраженного излучения от цели в дальней зоне селекции;
- время запаздывания отраженного излучения от цели в дальней зоне селекции;
 - текущее расстояние до цели в дальней зоне селекции;
- текущее расстояние до цели в дальней зоне селекции;
- длительность зондирующих и приемных радиоимпульсов;
- период повторения спаренных радиоимпульсов;
- временной интервал между первым и вторым зондирующими радиоимпульсами пары.
Полученный на третьем выводе АД преобразованный сигнал (6) от цели в ближней зоне в виде видеоимпульсов и сигнал (8) от цели в дальней зоне в виде радиоимпульсов на ПЧ разнесены по времени (см. эпюру «ж» на фиг. 4). Поэтому для разделения этих сигналов в предлагаемом устройстве служит коммутатор сигналов КС (см. фиг. 1), управляемый импульсами управления частотой генерации автодина (см. эпюру «а» на фиг. 4).
В случае приема сигнала от цели в ближней зоне селекции коммутатор через второй выход КС направляет сигнал на сигнальный вход второго АЦП-2.
В случае приема сигнала от цели в дальней зоне селекции коммутатор КС через первый выход направляет сигнал в виде радиоимпульса ПЧ на сигнальный вход смесителя СМ, где в результате нелинейного взаимодействия сигналов РЧ (8) и опорных (3) колебаний ПЧ происходит преобразование сигналов в область низких доплеровских частот. При этом на выходе смесителя СМ сигналы  (см. эпюру «з» на фиг. 4) формируются в виде видеоимпульсов, которые далее поступают на сигнальный вход АЦП-1. Выражение, полученное для этих видеоимпульсов, имеет вид:
(см. эпюру «з» на фиг. 4) формируются в виде видеоимпульсов, которые далее поступают на сигнальный вход АЦП-1. Выражение, полученное для этих видеоимпульсов, имеет вид:
 , (9)
, (9)
где
 - множитель амплитуды выходных сигналов смесителя СМ;
- множитель амплитуды выходных сигналов смесителя СМ;
 - коэффициент преобразования смесителя СМ;
- коэффициент преобразования смесителя СМ;
 - единичная функция преобразованного сигнала на выходе смесителя СМ;
- единичная функция преобразованного сигнала на выходе смесителя СМ;
 - собственные шумы смесителя и автодинного генератора АГ, преобразованные на выход смесителя СМ.
- собственные шумы смесителя и автодинного генератора АГ, преобразованные на выход смесителя СМ.
Первые слагаемые в (6) и (9), представляющие результат преобразования отраженного сигнала в автодине АД и совокупности автодина и смесителя СМ, содержат информацию о дальности до целей и скорости их движения. При этом для реально существующих скоростей движения целей справедливо условие, что за время  действия зондирующего радиоимпульса расстояние между антенной А и целями практически не изменится. Тогда согласно (6) и (9) полученные видеоимпульсы остаются в течение их формирования практически постоянными (см. эпюры «ж» и «з» на фиг. 4). Поэтому выглядят они в форме прямоугольных функций времени (верхняя «полка» их не изменяется), при этом «высота» видеоимпульсов пропорциональна уровню отраженного сигнала, а знак (вверх или вниз) их зависит от текущей разности фаз излученного автодином и отраженного от цели колебаний. При относительном перемещении цели мгновенные изменения высоты видеоимпульсов происходят с доплеровской частотой [57]. При условии равномерного и прямолинейного движения цели во времени t набег фазы в (6) и (9) имеет вид
действия зондирующего радиоимпульса расстояние между антенной А и целями практически не изменится. Тогда согласно (6) и (9) полученные видеоимпульсы остаются в течение их формирования практически постоянными (см. эпюры «ж» и «з» на фиг. 4). Поэтому выглядят они в форме прямоугольных функций времени (верхняя «полка» их не изменяется), при этом «высота» видеоимпульсов пропорциональна уровню отраженного сигнала, а знак (вверх или вниз) их зависит от текущей разности фаз излученного автодином и отраженного от цели колебаний. При относительном перемещении цели мгновенные изменения высоты видеоимпульсов происходят с доплеровской частотой [57]. При условии равномерного и прямолинейного движения цели во времени t набег фазы в (6) и (9) имеет вид
 , (10)
, (10)
 , (11)
, (11)
где
 ,
,  - начальные фазовые сдвиги, которые определяются положением целей в момент времени
- начальные фазовые сдвиги, которые определяются положением целей в момент времени  ;
;
 ,
,  - частоты Доплера для первой (в ближней зоне) и второй (в дальней зоне) целей соответственно;
- частоты Доплера для первой (в ближней зоне) и второй (в дальней зоне) целей соответственно;
 ,
,  - относительные радиальные скорости первой (в ближней зоне) и второй (в дальней зоне) целей относительно СБРЛ.
- относительные радиальные скорости первой (в ближней зоне) и второй (в дальней зоне) целей относительно СБРЛ.
С учетом (10) и (11) выражения (6) и (9) при сохранении всех принятых выше обозначений имеют вид:
 , (12)
, (12)
 . (13)
. (13)
Вторые слагаемые  и
и  в (12) и (13), как отмечалось выше, отображают результат преобразования собственных шумов автодинного генератора АГ и смесителя СМ. Присутствие этих шумов выражается в шумовой модуляции высоты видеоимпульсов. При этом необходимо отметить, что шумовые составляющие
в (12) и (13), как отмечалось выше, отображают результат преобразования собственных шумов автодинного генератора АГ и смесителя СМ. Присутствие этих шумов выражается в шумовой модуляции высоты видеоимпульсов. При этом необходимо отметить, что шумовые составляющие  и
и  представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует. Кроме того, благодаря значительному разносу частот первого в паре (зондирующего) и второго (приемного) радиоимпульсов влияние фликкерных флуктуаций генератора и шумов смесителя пренебрежимо мало при приеме сигналов от цели дальней зоны селекции.
представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует. Кроме того, благодаря значительному разносу частот первого в паре (зондирующего) и второго (приемного) радиоимпульсов влияние фликкерных флуктуаций генератора и шумов смесителя пренебрежимо мало при приеме сигналов от цели дальней зоны селекции.
При приеме отраженных сигналов от цели в ближней зоне этот сигнал воздействует на ВЧ генератор во время формирования первого зондирующего радиоимпульса. В этом случае неизбежно присутствие в сигнале наряду с «белым» шумом фликкерных флуктуаций ВЧ генератора. Спектральное распределение последних обратно пропорционально частоте, что ограничивает дальность действия СБРЛ при малых скоростях движения цели. Однако в этом случае отраженный сигнал от цели принимается в ближней зоне селекции, где он является достаточно сильным и указанное ограничение не имеет значения.
С выхода смесителя СМ (см. фиг. 1) видеоимпульсы с составляющими шума далее поступают на сигнальный вход АЦП-1. Во время действия импульсов выборки  (см. диаграмму «г» на фиг. 4) в АЦП-1 и АЦП-2 происходит выборка и запоминание мгновенных значений сигналов (12) и (13) в виде импульсов, амплитуда которых равна мгновенным значениям этих сигналов (см. диаграммы «ж» и «з» на фиг. 4). Уровни этих импульсов далее в АЦП-1 и АЦП-2 преобразуются в цифровые значения, которые в виде параллельного кода поступают в ОЗУ БЦОС в качестве массивов данных, полученных для принятого сигнала от
(см. диаграмму «г» на фиг. 4) в АЦП-1 и АЦП-2 происходит выборка и запоминание мгновенных значений сигналов (12) и (13) в виде импульсов, амплитуда которых равна мгновенным значениям этих сигналов (см. диаграммы «ж» и «з» на фиг. 4). Уровни этих импульсов далее в АЦП-1 и АЦП-2 преобразуются в цифровые значения, которые в виде параллельного кода поступают в ОЗУ БЦОС в качестве массивов данных, полученных для принятого сигнала от  -го зондирующего радиоимпульса:
-го зондирующего радиоимпульса:
 , (14)
, (14)
 , (15)
, (15)
где
 ,
,  - цифровые отсчеты мгновенных значений принятого сигнала от -го зондирующего радиоимпульса, полученные для
- цифровые отсчеты мгновенных значений принятого сигнала от -го зондирующего радиоимпульса, полученные для  -го тактового импульса (здесь
-го тактового импульса (здесь  ) для целей, находящихся в ближней и дальней зонах селекции соответственно;
) для целей, находящихся в ближней и дальней зонах селекции соответственно;
 - число отсчетов за время
- число отсчетов за время  .
.
При этом шумовые составляющие  и
и  в результате дискретизации и оцифровки мгновенных значений отсчетов вследствие эргодичности процессов в среднем по реализациям
в результате дискретизации и оцифровки мгновенных значений отсчетов вследствие эргодичности процессов в среднем по реализациям  и отсчетам
и отсчетам  сохраняют свое среднеквадратическое значение уровня шума
сохраняют свое среднеквадратическое значение уровня шума  в массивах данных (14) и (15) Значение уровня шума может быть рассчитано или измерено экспериментально и учтено в программе работы БЦОС.
в массивах данных (14) и (15) Значение уровня шума может быть рассчитано или измерено экспериментально и учтено в программе работы БЦОС.
Обработка полученных данных в массивах (14) и (15) БЦОС позволяет по значениям мгновенных отсчетов рассчитать амплитуду отраженного сигнала, а также его отношение сигнал/шум и решить задачу обнаружения цели на заданных дальностях. По величине временной задержки между парными радиоимпульсами определяется расстояние до цели, а по значениям изменения фазы и ее знака отраженного сигнала - скорость (по частоте Доплера) движения цели. Текущие результаты обработки сигналов через шинный приемопередатчик БЦОС с заданным темпом передаются по шине ШВД конечному потребителю.
Предлагаемый способ и устройство были реализованы в виде действующего макета СБРЛ 8-мм диапазона, выполненного на основе автодинного генератора на диоде Ганна с выделением сигнала по изменению амплитуды колебаний посредством диода Шоттки, установленного в резонатор генераторной камеры. Запуск генератора осуществлялся по цепи питания парными импульсами напряжения амплитудой 4,5 В, имеющих фронт не более 0,1 нс, период повторения 5 мкс, длительность 40 нс. Время задержки между радиоимпульсами изменялось в пределах от 40 до 1000 нс. Число отсчетов за время излучения радиоимпульса  (частота импульсов выборки
(частота импульсов выборки  ГГц). При этом разрешающая способность СБРЛ по дальности составила
ГГц). При этом разрешающая способность СБРЛ по дальности составила  м. Ближняя зона селекции составила от 0 до 6 м. Дальняя зона селекции шириной 6 м изменялось в пределах от 6 до 150 м. Результаты лабораторных исследований образца показали, что потенциал СБРЛ в полосе доплеровских частот
м. Ближняя зона селекции составила от 0 до 6 м. Дальняя зона селекции шириной 6 м изменялось в пределах от 6 до 150 м. Результаты лабораторных исследований образца показали, что потенциал СБРЛ в полосе доплеровских частот  кГц составляет
кГц составляет  дБ. Испытания макетного образца на открытой площадке с уголковыми отражателями и легковым автомобилем подтвердили работоспособность устройства в соответствие с заявляемым способом импульсно-доплеровской радиолокации.
дБ. Испытания макетного образца на открытой площадке с уголковыми отражателями и легковым автомобилем подтвердили работоспособность устройства в соответствие с заявляемым способом импульсно-доплеровской радиолокации.
Таким образом, показана осуществимость предлагаемого устройства в СБРЛ, предназначенных для обнаружения целей в ближней и дальней зонах селекции и определения параметров их движения, в том числе в системах для предупреждения столкновений транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ЗОНДИРОВАНИЕМ ПРОСТРАНСТВА ФАЗОМАНИПУЛИРОВАННЫМИ СИГНАЛАМИ С ПЕРЕСТРОЙКОЙ ДЛИТЕЛЬНОСТИ ПАРЦИАЛЬНЫХ РАДИОИМПУЛЬСОВ ПО ЛИНЕЙНОМУ ЗАКОНУ | 2009 |
|
RU2405169C2 |
| СПОСОБ РАДИОЛОКАЦИИ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2023 |
|
RU2799999C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| АВТОДИННЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2779887C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
Изобретение относится к системам ближней радиолокации (СБРЛ), предназначенным для обнаружения и определения параметров движения целей, как минимум, в двух зонах селекции по дальности. Может использоваться в автономных информационно-измерительных системах в качестве неконтактных датчиков обнаружения приближающихся целей, например, в системах предотвращения столкновений транспортных средств. Техническим результатом является исключение «мертвой зоны» в непосредственной близости от СБРЛ и формирования в этом диапазоне дальностей второй (ближней) рабочей зоны селекции, чем обеспечивается возможность обнаружения и определения параметров движения цели как в дальней зоне селекции, так и в непосредственной близости от СБРЛ. Заявленный способ состоит в том, что на высокочастотный (ВЧ) генератор ударно воздействуют последовательностью парных импульсов запуска с крутыми фронтами и формируют в ВЧ генераторе в течение каждого радиоимпульса когерентные относительно частоты запускающих импульсов колебания. При этом частоту первых радиоимпульсов каждой пары смещают относительно частоты вторых радиоимпульсов на величину промежуточной частоты (ПЧ). Облучают контролируемое пространство сформированными в ВЧ генераторе зондирующими радиоимпульсами. Принимают отраженные от находящихся в ближней и дальней зонах целей радиоимпульсы, полученные от первого зондирующего радиоимпульса каждой пары. Смешивают колебания принятых радиоимпульсов с собственными колебаниями ВЧ генератора, вызывая в нем автодинные изменения амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора. Выделяют автодинные изменения в виде видеоимпульсов ближней зоны селекции во время формирования первого зондирующего радиоимпульса и в виде радиоимпульсов разностной частоты (РЧ) во время формирования второго зондирующего радиоимпульса. Смешивают радиоимпульсы РЧ с опорными колебаниями ПЧ в смесителе, преобразуя радиоимпульсы РЧ в область низких доплеровских частот в виде видеоимпульсов дальней зоны селекции. Затем раздельно выполняют выборку мгновенных значений первых и вторых видеоимпульсов и по значениям выборок получают информацию о наличии целей в ближней и дальней зонах селекции, а также расстоянии и параметрах их перемещения. Заявленное устройство, реализующее предложенный способ, содержит подключенный к антенне ВЧ генератор, выполненный с возможностью электрического управления частотой генерации, связанный с устройством выделения автодинного сигнала. Выход последнего подключен к сигнальному входу коммутатора сигналов (КС), первый выход которого подключен к смесителю, а второй - к сигнальному входу второго устройства выборки-хранения (УВХ). Первый вывод программируемого блока синхронизации и управления (ПБСУ) подключен к управляющему входу частотой ВЧ генератора и входу управления КС. Между вторым выводом ПБСУ и входом запуска ВЧ генератора введен генератор импульсов ударного возбуждения (ГИУВ), третий вывод ПБСУ подключен к гетеродинному входу смесителя, выход которого подключен к входу первого УВХ. При этом входы управления первого и второго УВХ подключены к четвертому и пятому выводам ПБСУ соответственно. 2 н. и 7 з.п. ф-лы, 4 ил.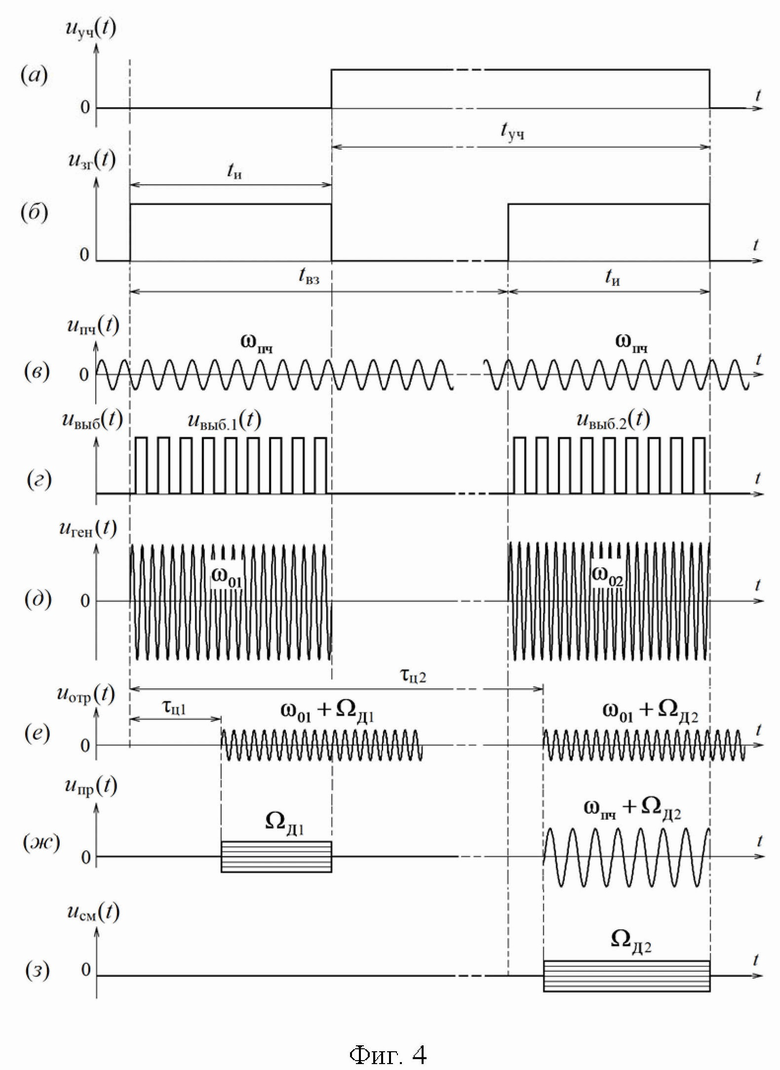
1. Способ импульсно-доплеровской радиолокации для контроля двух зон селекции цели по дальности, заключающийся в том, что на высокочастотный (ВЧ) генератор ударно воздействуют некратной последовательностью парных импульсов запуска с крутыми фронтами, период повторения пар которых превышает максимальное время запаздывания отраженного от цели радиоимпульса дальней зоны селекции цели, а период повторения пар радиоимпульсов не кратен временному интервалу между ними, соответствующему времени задержки второго радиоимпульса пары относительно ее первого радиоимпульса, формируют при этом в ВЧ генераторе в течение каждого радиоимпульса когерентные относительно частоты запускающих импульсов колебания, причем частоту первых радиоимпульсов каждой пары смещают относительно частоты вторых радиоимпульсов на величину промежуточной частоты (ПЧ), облучают контролируемое пространство сформированными в ВЧ генераторе зондирующими радиоимпульсами, принимают отраженные от находящихся в дальней зоне контроля целей радиоимпульсы, полученные от первого зондирующего радиоимпульса каждой пары, смешивают колебания принятых радиоимпульсов с собственными колебаниями ВЧ генератора во время формирования в нем второго радиоимпульса каждой пары, вызывая в ВЧ генераторе автодинные изменения частоты и амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора, выделяют автодинные изменения в виде радиоимпульсов разностной частоты (РЧ) во время формирования второго зондирующего радиоимпульса каждой пары, смешивают радиоимпульсы РЧ с опорными колебаниями ПЧ в смесителе, преобразуя радиоимпульсы РЧ в область доплеровских частот в виде видеоимпульсов дальней зоны селекции, затем выполняют выборку мгновенных значений этих видеоимпульсов, и по значениям выборок получают информацию о наличии цели в дальней зоне селекции, а также расстояния и параметрах ее перемещения, отличающийся тем, что принимают полученные от первого зондирующего радиоимпульса каждой пары отраженные радиоимпульсы от цели, находящейся в ближней зоне селекции, смешивают колебания принятых радиоимпульсов с собственными колебаниями ВЧ генератора во время формирования в нем первых радиоимпульсов каждой пары, вызывая в ВЧ генераторе автодинные изменения частоты и амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора с доплеровской частотой, выделяют автодинные изменения в виде видеоимпульсов ближней зоны селекции цели во время формирования первых зондирующих радиоимпульсов каждой пары, затем выполняют выборку мгновенных значений этих видеоимпульсов, и по значениям выборок получают информацию о наличии целей в ближней зоне селекции, а также параметрах их перемещения.
2. Способ по п. 1, отличающийся тем, что частоту зондирующего радиоимпульса выбирают отстоящей от частоты приемных радиоимпульсов на величину, по крайней мере, на порядок большую, чем половина полосы синхронизации ВЧ генератора, вызываемой воздействием отраженного радиоимпульса.
3. Способ по п. 1, отличающийся тем, что длительность фронта импульсов ударного возбуждения выбирают в пределах зоны перехода к инкрементному формированию радиоимпульсов ВЧ генератора не более половины периода его ВЧ колебаний, а амплитуду импульсов - не менее чем на порядок выше уровня собственных шумов ВЧ генератора.
4. Устройство импульсно-доплеровской радиолокации с автодинным приёмопередатчиком для контроля двух зон селекции цели по дальности, реализующее способ по п.1, содержащее антенну, высокочастотный (ВЧ) генератор, выполненный с возможностью электрического управления частотой генерации и формирования в течение каждого радиоимпульса когерентных относительно частоты запускающих импульсов колебаний при ударном воздействии на него некратной последовательностью парных импульсов запуска с крутыми фронтами, период повторения пар которых не кратен временному интервалу между ними, формируемых генератором импульсов ударного возбуждения (ГИУВ), где частота первых радиоимпульсов каждой пары смещена относительно частоты вторых радиоимпульсов на величину промежуточной частоты (ПЧ), устройство выделения автодинного сигнала, смеситель, первое и второе устройства выборки-хранения (УВХ), генератор импульсов ударного возбуждения (ГИУВ), а также программируемый блок синхронизации и управления (ПБСУ), причем высокочастотный порт ВЧ генератора присоединен к антенне, устройство выделения автодинного сигнала связано с ВЧ генератором, первый вывод ПБСУ подключен к управляющему входу частотой ВЧ генератора, между вторым выводом ПБСУ и входом запуска ВЧ генератора введен ГИУВ, третий вывод ПБСУ подключен к гетеродинному входу смесителя, выход которого подключен к входу первого УВХ, отличающееся тем, что к сигнальному выходу устройства выделения автодинного сигнала подключен сигнальный вход коммутатора сигналов (КС), первый выход которого подключен к входу смесителя, второй выход - к входу второго УВХ, а вход управления КС - к первому выводу ПБСУ, при этом входы управления первого и второго УВХ подключены к четвертому и пятому выводам ПБСУ соответственно, при этом антенна обеспечивает излучение в контролируемое пространство сформированных в ВЧ генераторе зондирующих радиоимпульсов и прием отраженных от находящихся в ближней и дальней зонах контроля целей радиоимпульсов, полученных от первого зондирующего радиоимпульса каждой пары, ВЧ генератор выполнен с возможностью смешивания с собственными колебаниями колебаний, принятых из ближней зоны радиоимпульсов во время формирования в нем первого радиоимпульса каждой пары, и принятых из дальней зоны радиоимпульсов во время формирования в нем второго радиоимпульса каждой пары, с получением в ВЧ генераторе автодинных изменений частоты и амплитуды колебаний, а также тока и/или напряжения в цепи питания ВЧ генератора с доплеровской частотой, выделения автодинных изменений в виде видеоимпульсов ближней зоны селекции цели во время формирования первых зондирующих радиоимпульсов каждой пары, и выделения автодинных изменений в виде радиоимпульсов разностной частоты (РЧ) дальней зоны селекции во время формирования второго зондирующего радиоимпульса каждой пары радиоимпульсов, коммутатор сигналов служит для разделения сигналов от цели в ближней и дальней зонах и направления сигнала, в случае приема его от цели в дальней зоне селекции, через первый выход КС на сигнальный вход смесителя см, обеспечивающего смешивание радиоимпульсов РЧ с опорными колебаниями ПЧ в смесителе, преобразуя радиоимпульсы РЧ в область доплеровских частот в виде видеоимпульсов дальней зоны селекции, которые далее поступают на сигнальный вход первого аналого-цифрового преобразователя АЦП-1 для выполнения выборки мгновенных значений видеоимпульсов дальней зоны селекции, либо направления сигнала, в случае приема его от цели в ближней зоне селекции, через второй выход КС на сигнальный вход второго аналого-цифрового преобразователя АЦП-2 для выполнения выборки мгновенных значений видеоимпульсов ближней зоны селекции, а блок цифровой обработки сигналов (БЦОС) выполнен с возможностью получения от АЦП-1 и АЦП-2 значений выборок мгновенных значений видеоимпульсов дальней и ближней зон селекции соответственно и получения по значениям выборок информации о наличии целей в дальней и ближней зонах селекции, а также параметрах их перемещения.
5. Устройство по п. 4, отличающееся тем, что ПБСУ содержит первый, второй, третий, четвертый и пятый выводы, тактовый генератор, подключенный к входам программируемых умножителя (ПУЧ) и делителя (ПДЧ) частоты, а также первый селектор импульсов на три входа «а», «б» и «в», второй селектор импульсов на три входа « », «б» и «в», где вход «» является инвертирующим, выходы «а» ПДЧ, «б» ПДЧ и «б» ПУЧ по отдельности соответственно подключены к входам «а», «б» и «в» первого селектора импульсов, и к входам «», «б» и «в» второго селектора импульсов, при этом первый, второй, третий, четвертый и пятый выводы ПБСУ подключены к выходам «а» ПДЧ, «б» ПДЧ, «а» ПУЧ и выходам первого и второго селекторов импульсов на три входа соответственно.
», «б» и «в», где вход «» является инвертирующим, выходы «а» ПДЧ, «б» ПДЧ и «б» ПУЧ по отдельности соответственно подключены к входам «а», «б» и «в» первого селектора импульсов, и к входам «», «б» и «в» второго селектора импульсов, при этом первый, второй, третий, четвертый и пятый выводы ПБСУ подключены к выходам «а» ПДЧ, «б» ПДЧ, «а» ПУЧ и выходам первого и второго селекторов импульсов на три входа соответственно.
6. Устройство по любому из пп. 4, 5, отличающееся тем, что устройство выделения автодинного сигнала ВЧ генератора выполнено в виде широкополосного датчика тока, включенного последовательно в цепь питания ВЧ генератора, причем в качестве датчика тока могут использоваться резистор, индуктивность, трансформатор, колебательный контур, схема с трансформаторно-емкостной связью контуров, схема делителя Вилкинсона, образованная микрополосковыми линиями, или электронная схема на основе транзисторов и интегральных усилителей, которая преобразует автодинные изменения тока в напряжение автодинного сигнала.
7. Устройство по любому из пп. 4, 5, отличающееся тем, что устройство выделения автодинного сигнала РЧ выполнено на основе детекторного диода, помещенного в резонатор ВЧ генератора или в связанную с резонатором передающую линию.
8. Устройство по любому из пп. 4-7, отличающееся тем, что ВЧ генератор выполнен со стабилизацией частоты дополнительным внешним высокодобротным резонатором, собственная частота которого управляется при помощи регулируемой емкости варакторного диода, варикапа или посредством переключающих p-i-n-диодов.
9. Устройство по любому из пп. 4-8, отличающееся тем, что в качестве устройств выборки-хранения к выходам смесителя и второму выходу коммутатора сигналов подключены аналого-цифровые преобразователи.
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| US 5864313 A, 26.01.1999 | |||
| Устройство импульсной локации на основе автодина | 2020 |
|
RU2755202C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| Автодинный радиолокатор | 1991 |
|
SU1775696A1 |
| АВТОДИННЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2779887C1 |
| EP 0499706 A2, 26.08.1992 | |||
| US 6587072 B1, 01.07.2003. | |||

