Изобретение относится к радиотехнике и может использоваться в системах цифровой обработки информации.
Цель изобретения - повышение быстродействия при независимой регулировке центральной частоты коррекции и полосы коррекции.
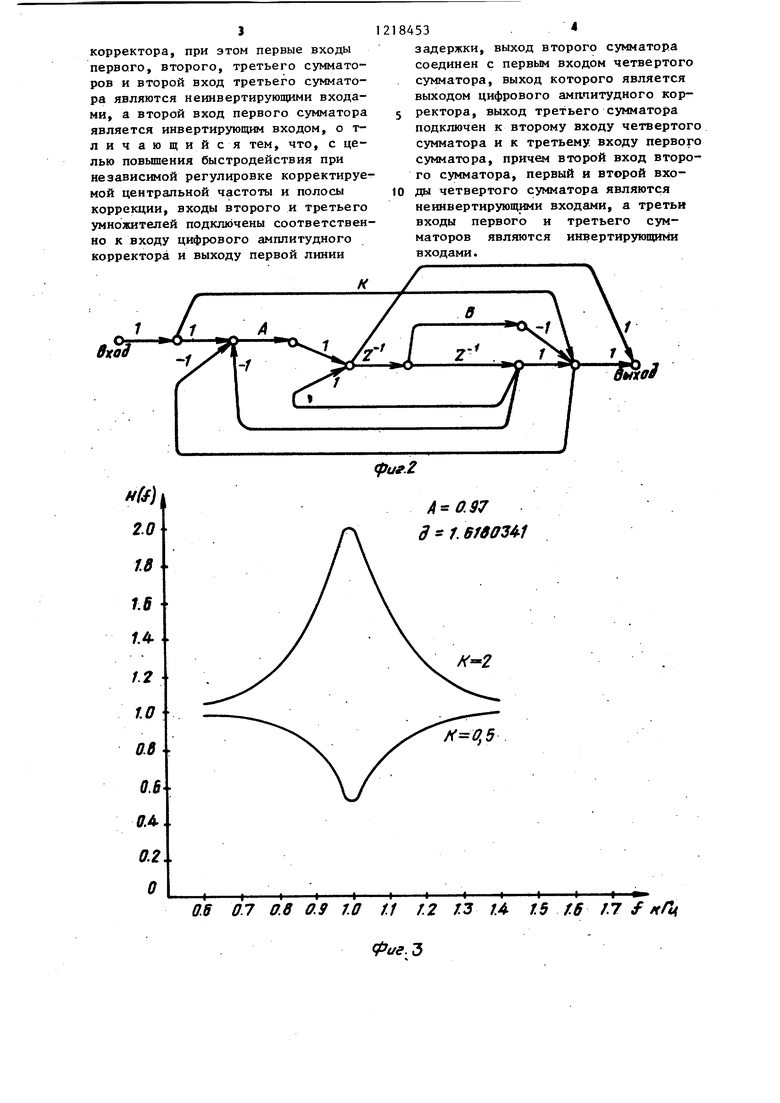
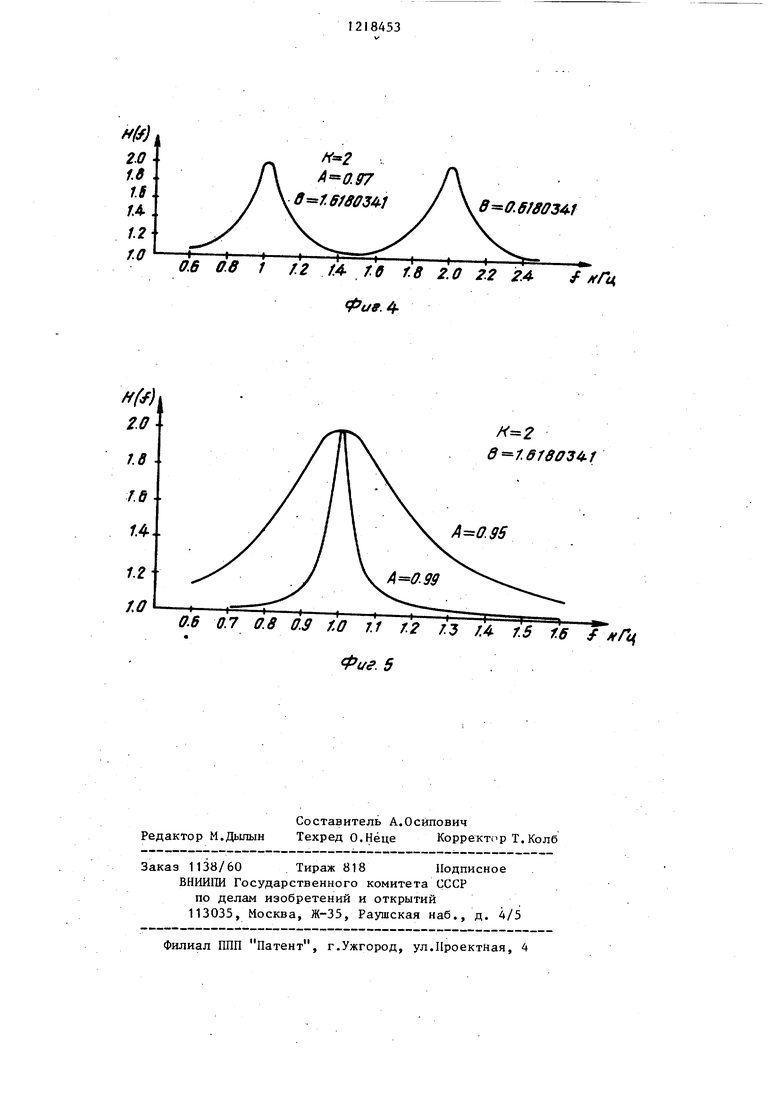
На фиг.1 приведена структурная электрическая схема цифрового амплитудного корректора; на фиг,2 - его граф; на фиг.3,4 и 5 - амплитудно- частотные характеристики.
Цифровой амплитудный корректор содержит первую и вторую линии 1 и
. Т Zilli Т
1- Jt
сОТ
г
(г)
10
г де Т - период квантования сигна Квадрат модуля передаточной фу ции при этом будет определяться к
,. | 2Acosu)T-Ae.16K (lM)4ih 1 2Acosu)(i-A)
Далее дпя собственной частоты 2 задержки, первый - четвертый сумма 15 можно записать торы 3 - 6, первый - третий умножи- 1НП х))
тели 7-9.
Цифровой амплитудный корректор работает следующим образом.
На фиг.2 изображен граф цифрового 20 амплитудного корректора, исходя из которого его передаточная функция в г-1шоскости равна
A(-K)K -A6z 4AH Kl-K z 25 1-А6г- М1А-1)х- ( l)
I
где А , К и В значения коэффициентов первого - третьего 7-9 умножителей соответственно.
Трансформировав передаточную функ цию (1) в частотную область посредством преобразования имеем
откуда согласно (3) получаем
2Acos JT-AB 0.
Следовательно, собственная час та цифрового амплитудного коррект определяется выражением
8
(jJao 4:rQ.t ccOS -яКоординаты полосы коррекции по произвольно заданн ому уровню опре 30 деляются из выражения
lH(jcOu,i)l HCioJui)
В результате имеем
/ц,7Л - г
сОц :--Qpccos
сОц anccos
lBA b -KM- iK(i-A))A(6 -M+l6K 1-A))() , A()-16K4l-A T()
lBA(h -KM+ K(1-A)J()A(,)-teK (l-A().1()
()-16K (1-A)() 40
причем полоса коррекции равна
ft u3 :tJu,1 ,)
Из анализа выражения (3) видно, что возможна регулировка формы амплитудно-частотной характеристики с помощью коэффициента К . Анализируя выражение (), можно заключить, что посредством изменения значения коэффициента В возможно управление собственной частотой цифрового амплитудного корректора. Далее последовательно изменяя значение коэффициента А, согласно выражению (5) можно при постоянной собственной частоте цифрового амплитудного корректора управлять полосой коррекции амплитудно-частотной характеристики.
Т Т
сОТ
г
(г)
г де Т - период квантования сигнала. Квадрат модуля передаточной функции при этом будет определяться как
,. | 2Acosu)T-Ae.16K (lM)4ih cJT 1 2Acosu)(i-A)
(3)
откуда согласно (3) получаем
2Acos JT-AB 0.
Следовательно, собственная частота цифрового амплитудного корректора определяется выражением
8
(jJao 4:rQ.t ccOS -я(4)
Координаты полосы коррекции по произвольно заданн ому уровню опре- деляются из выражения
lH(jcOu,i)l HCioJui)
В результате имеем
/ц,7Л - г
5
0
5
Формула изобретения
Цифровой амплитудный корректор, содержащий последовательно соединенные первый сумматор, первый умножитель и второй сумматор, последовательно соединенные первую линию задержки, вторую линию задержки и третий сумматор, второй умножитель, выход которого, подключен к второму входу третьего сумматора, третий умножитель, выход которого соединен с третьим входом третьего сумматора, четвертый сумматор, выход второй линии задержки подключен к вторым входам первого и второго сумматоров, первьй вход первого сумматора является -входом цифрового амплитудного
корректора, при этом первые входы первого, второго, третьего сумматоров и второй вход третьего сумматора являются неинвертирующими входами, а второй вход первого сумматора является инвертирующим входом, о т- личающийся тем, что, с целью повьшения быстродействия при независимой регулировке корректируемой центральной частоты и полосы коррекции, входы второго и третьего умножителей подключены соответственно к входу цифрового амплитудного корректора и выходу первой линии
218453 .
задержки, выход второго сумматора соединен с первым входом четвертого сумматора, выход которого является выходом цифрового амлпитудного кор- 5 ректора, выход третьего сумматора подключен к второму входу четвертого сумматора и к третьему входу первого сумматора, причем второй вход второго cjT MaTopa, первый и второй вхо- 10 ды четвертого сумматора являются неиивертирующими входами, а третьи входы первого и третьего сумматоров являются инвертирующими входами.
ВжоЗ
TSfoi
(puf.Z
ffff)
2.0 1.8
16 1Л
1.2 1.0 О.д
0.6 ОЛ
0.2 О
.97 д-1. Sieoy l
/r-f
,5
0.5 0.7 0.8 0.9 1.0 1.1 Г.2 7.3 1Л 15 Гб /.7 / л-Лг
f/e.
Mff)
2.0 1.6 tS. ГЛ.
12
to
/r .
.gr e l6fe03 1
,618034.1
oT.e 1 /2 fA re f.B 2.0 2.2 2.4. / ж/2
,618034.1
Фи9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальное звено цифрового фильтра | 1987 |
|
SU1450080A1 |
| Цифровой амплитудный корректор | 1983 |
|
SU1171992A1 |
| Универсальное звено цифрового фильтра | 1985 |
|
SU1317650A1 |
| Рекурсивный цифровой режекторный фильтр | 1984 |
|
SU1224979A1 |
| Цифровой фильтр | 1989 |
|
SU1672559A1 |
| Цифровое фазовое звено | 1984 |
|
SU1224982A1 |
| Рекурсивный режекторный фильтр | 1980 |
|
SU959266A1 |
| Рекурсивный цифровой фильтр | 1982 |
|
SU1053275A1 |
| Цифровой фильтр | 1988 |
|
SU1555825A1 |
| Рекурсивный фильтр дискретных сигналов | 1985 |
|
SU1241420A1 |
Изобретение относится к области радиотехники и может использоваться в системах цифровой обработки информации. Обеспечивается повьшение быстродействия при независимой регулировке центральной частоты коррекции и полосы коррекции. Входной сигнал поступает на первый сумматор (С)3 и через умножитель 8 на третий С 5. Выходной сигнал первого С 3 через первый умножитель 7 поступает на : второй С 4. С сумматора 4 сигнал поступает на четвертый С 6, через первую 1 и вторую 2 линии задержек (ЛЗ) - на неинвертирующий вход третьего С 5, а через первую ЛЗ 1 и третий умножитель 9 - на инвертирующий его вход. Выходно й сигнал третьего С 5 подается на второй вход четвертого С6 и на инвертирующий вход первого СЗ. С выхода второй ЛЗ 2 сигнал подается на второй вход второго С 4 и третий инвертирующий вход первого СЗ. На выходе четвертого С6 реализуется передаточная функция в Z -плоскости H(z- )-{ A{1-K)K -ABz: -b (l + K)-K z- }/Cl-ABz V(2ArV -(2A-1) 3 ил. ffof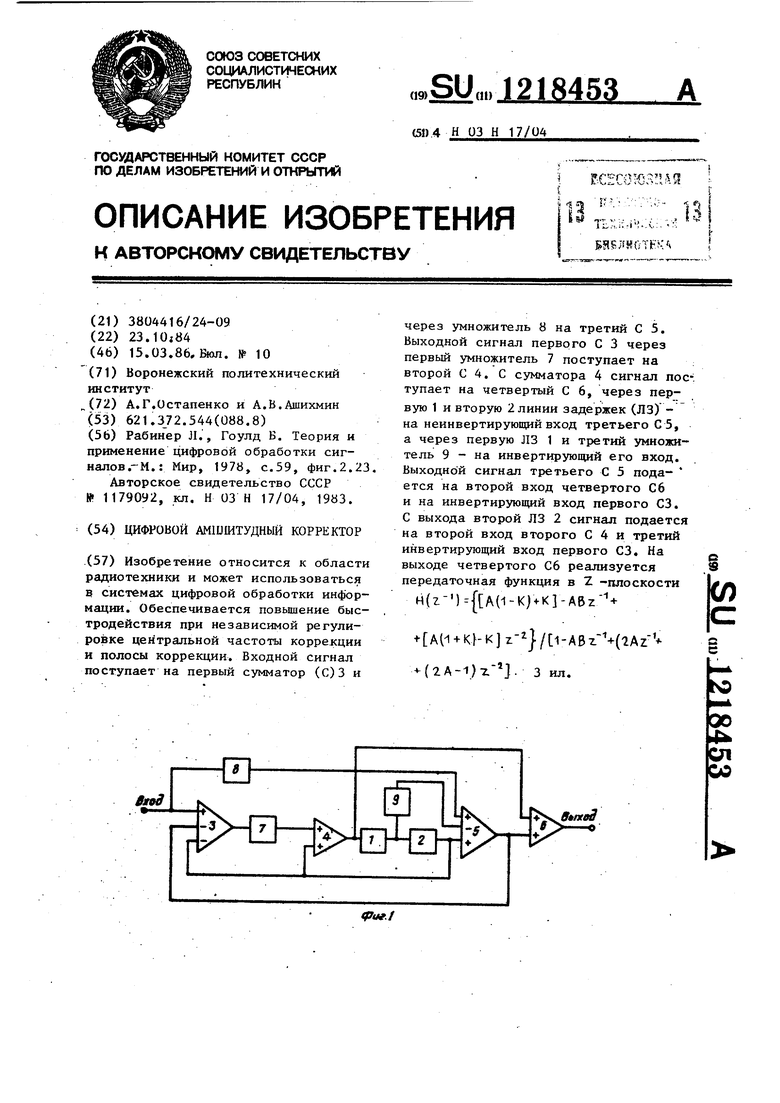
.ffrffffS f
ff-6 0.7 0.8 0.3 f.O 11 12 7J Is t6 Гж/г
Фие. 5
Составитель A.Осипович Редактор М.Дылын Техред О.НёцеКорректор Т. Колб
Заказ 1138/60Тираж 818Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
| Рабин ер Л., Гоулд Б, Теория и применение цифровой обработки сиг- налов.-М.: Мир, 1978, с.59, фиг.2.23 | |||
| Устройство для контроля шпоночного паза | 1984 |
|
SU1179092A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
