Изобретение относится к системам гявтоматического регулирования параметров объекта, например теплофикационной турбины с отборами пара.
Целыо изобретения является расширение диапазона использования способа подстройки динамических параметров .
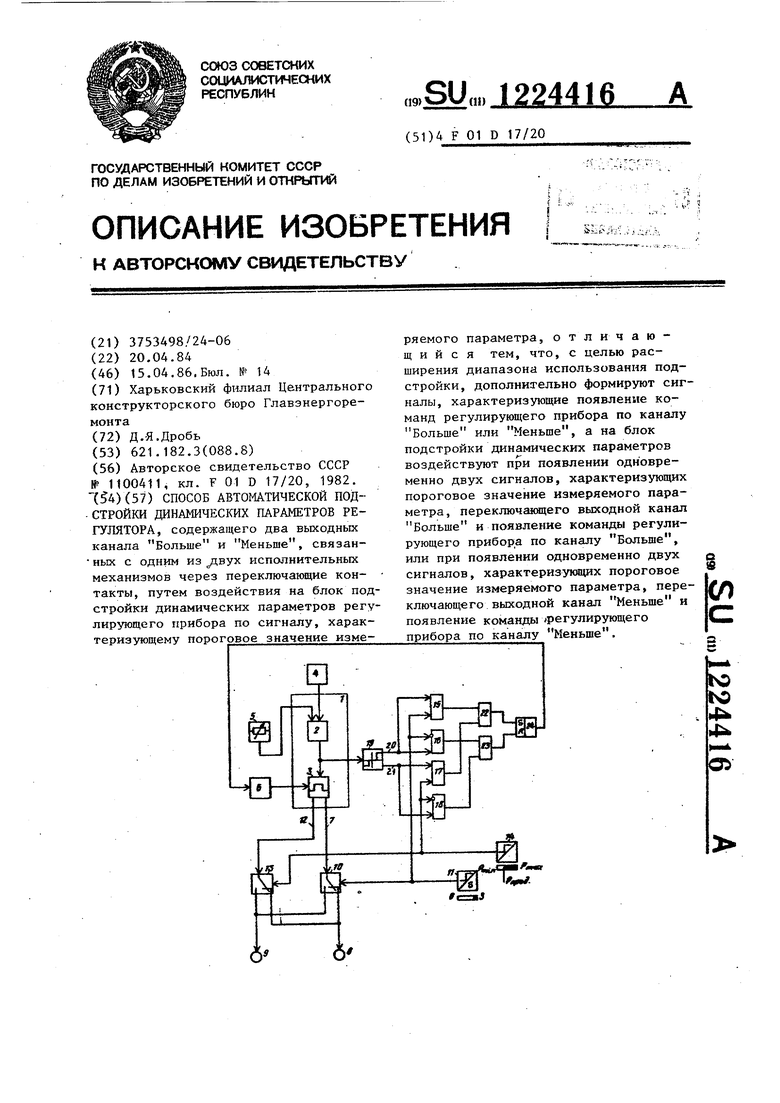
На чертеже показана структурная схема регулятора с автоподстройкой динамических параметров, реализующая предлагаемый способ.
Регулятор состоит из регулирующего прибора 1 с измерительньм и регулирующим блоками 2 и 3. Ко входам измерительного блока -2 подключены выходы датчика 4 и задатчика 5 регулируемого параметра, а ко входам рет улнругощего блока 3 подключены выход, измерительного блока 2 и выход блока 6 подстройки динамических па- раметров.
Выход регулирующего блока 3по выгодному каналу 7 воздействия Больш
подключен к исполнительным механизмам 8,или 9 (например, к регулирую- щему клапану на байпасе подогревателя сетевой воды i-ши к задатчику гидравлического регулятора давления) через переключающий- контакт 10 датчика I1 порогового значения первого измеряемого параметра (например, зарытого положения регулирующего клапана на байпасе подогревателя сетевой воды)5 а по вькодному каналу 12 Меньше - через переключающий контакт 13 датчика 14 порогового значения второго измеря.емого параметра (например, нижнего предела давления в камере регулируемого отбора) ,. Датчик 11 порогового значени первого измеряемого параметра подключен к входу логического элемента 15 И и к инверсному входу логического элемента 16 И, а датчик 14 порогового значения второго измеряемого параметра подключен к входу логического элемента 17 И и к инверсном входу логического элемента 18 .И. К выходу измерительного блока 2 регу- лиру ощего прибора 1 подключен трех- позиционный эл1емент 19, выход 20 Больше которого подключен к вторым входам элементов 15 и 16 И, а выход 21 Меньше - к- вторым входам элеменТбв 17 и 18 И. Выходы элементов 15 и 17 И через элементы 22 и 23 ИЛИ подключены к S-входу элемент
блок 3
24, реализующего логическую функцию Память, а выходы элементов 16 и , 18 И - через элемент 23 ИЛИ к R-BXO- ду элемента 24. Вькод элемента 24
подключён к входу блока 6 подстройки динамических параметров,
Способ осуществляется следзтощим образом.
Система регулирования, реализующая предлагаемый способ, функционирует в режиме стабилизации текущего значения основного параметра. При отключении регулируемого параметра, например температуры сетевой воды,
от заданного значения в сторону меньше на выходе измерительного блока 2 появляется сигнал рассогласования, вызывающий генерирование регулирующим блоком 3 команд по каналу
7 Больше и формирование трехпози- ционным элементом 19 сигнала на его выходе 20 Больше, При отклонении регулируемого параметра от заданного значения в сторону больше регулигенерирует команды по
0
5
0
0
$
каналу 12 Меньше, а элемент 19 формирует сигнал на своем выходе 21 Меньше.
: Датчик 11 порогового значения первого измеряемого параметра формирует сигнал, эквивалентный логической 1, при закрытом положении клапана и сигнал, эквивалентный логическому О, при незакрытом положении клапана. Датчик 14 порогового значения второго измеряемого параметра формирует си1- нал, эквивалентный логической 1, при давлениях пара в камере отбора Bbmie предельного и сигнал, эквивалент-- ный логическому О, ниже предельного. При закрытом регулирующем клапане по сигналу от датчика 11 канал 7 воздействия Больше регулирующего прибора 1 подключен к исполнительному механизму 9 , при незакрытом регулирующем клапане - к исполнительному механизму 8. При давлении пара в камере отбора, большем предельного, по сигналу от датчика 14 канал 12 воздействия Меньше подключен к исполнительному механизму 9, а при давлении, меньшем предельного, - к
исполнительному механизму 8.
При закрытом регулирующем клапане и давлении пара.в камере отбора выше предельного каналы 7 и 12 воздействий регулирующего прибора 1 контактами 10 и 13 датчиков 11 и 14 из-
меряемых параметров подключены к исполнительному механизму 9, а на входы логических элементов 15-18 И от датчиков 11 и 14 поступают сигналы, эквивалентные логическим 1. Б этом случае при уменьшении регулируемого параметра по отношению к заданному значению регулирующий прибор 1 генерирует команду по каналу 7 Больше, воздействуя на исполнительный механизм 9, что приводит к увеличению задания регулятору давления в отборе и, следовательно, к по- вьшению давления, а релейньш элемент 19 формирует сигнал, эквивалентный логической 1, на своем выходе 20 Больше и сигнал, эквивалентный логическому О, на выходе 21 Меньше . При этом с выхода элемента 15 И сигнал, эквивалентный логической 1, поступает через элемент 22 ИЛИ на S-вход элемента 24 Память, определяя на его выходе сигнал, эквивалентный логической 1, и, тем самьм, выбор блоком 6 динамических параметров, установленных для воздействия регулирующего прибора t на исполнительный механизм 9. При балансе регулирующего прибора 1 сигнал на S-входе элемента 24 исчезает, однако на его вькоде сохраняется сигнал, соответствующий предьщущему состоянию его входных сигн алов. При увеличении основного параметра по отношению к заданному значению регулирующий прибор 1 генерирует команду по каналу 12 Меньше, воздействуя на исполнительный механизм 9, что приводит к уменьшению задания регулятора давления в отборе и,:следовательно, к понижению давления, а релейный элемент 19 формирует сигнал, эквивалентный логическому О, на своем выходе 20 БОЛЬШЕ и сигнал, эквивалентный логической 1, на выходе 21 меньше. При этом с выхода элемента 17 И сигнал, эквивалентный логической 1, .поступает через элемент 22 ИЛИ на S-вход элемента 24 Память, определяя на его выходе
10
)5
20
25
30
35
40
45
чает своим контактом 13 канал 12 воздействия Меньше регулирующего прибора 1 к исполнительному механизму 8, а на входы элементов 17 и 18 ИЛИ от датчика 14 поступает сиг нал, эквивалентный логическому О В этом случае при генерировании пр бором 1 команды .по каналу 7 Больше сигнал, эквивалентный логичес- кой 1, с выхода 20 Больше реле ного элемента 19 через элемент 15 и элемент 22 ИЛИ поступает на S-вх элемента 24, определяя выбор блоко 6 пар аметров динамической настройк регулятора, установленных для рабо регулятора с исполнительным механи мом 9, а при генерировании приборо 1 команды по каналу 12 Меньше си нал, эквивалентный логической 1, формируется на выходе 21 Меньше элемента 19 и через элементы 18 и 23 поступает на R-вход элемента 24 определяя на его выходе сигнал, эк валентный логическому О, и выбор блоком 6 динамических параметров, установленных для работы регулятор с исполнительным механизмом 8.
Воздействие прибора 1 по каналу ,2 Меньше на исполнительный механизм 8 сопровождается изменением значения первого измеряемого параме ра и при отклонении регулирукяцего клапана на байпасе подогревателя сетевой воды от закрытого положения датчик 11 переключает своим контактом 10 канал 7 воздействия Больше к исполнительному механизму 8, а на входы элементов 15 и 16 И от датчик 11 поступает сигнал, эквивалентный логическому О. С этого момента заданное значение регулируемого параметра поддерживается воздействием регулирующего прибора 1 на исполнительный механизм 8. При этом генерирование прибором 1 команды по каналу 7 воздействия Больше сопровождается формированием элементом 19 сигнала, эквивалентного логической 1 на выходе 20 Больше и воздействисигнал, эквивалентный логической 1, ° «ем этого сигнала через элемент 16 И
и элемент 23 ИЛИ на R-вход элемента 24, а генерирование прибором 1 коман ды по каналу 12 воздействия Меньше сопровождается формированием элемен- 55 том 19 сигнала, эквивалентного логи ческой 1, на выходе 21 Меньше и воздействием этого сигнала через элемент 18 И и элемент 23 ШШ на
и выбор блоком 6 динамических параметров, установленных для воздействия регулирующего прибора 1 на исполнительный механизм 9.
При понижении давления пара в камере регулирующего отбора до предельного значения датчик 14 переклю0
)5
0
5
0
5
0
5
чает своим контактом 13 канал 12 воздействия Меньше регулирующего прибора 1 к исполнительному механизму 8, а на входы элементов 17 и 18 ИЛИ от датчика 14 поступает сигнал, эквивалентный логическому О. В этом случае при генерировании прибором 1 команды .по каналу 7 Больше сигнал, эквивалентный логичес- кой 1, с выхода 20 Больше релейного элемента 19 через элемент 15 И и элемент 22 ИЛИ поступает на S-вход элемента 24, определяя выбор блоком 6 пар аметров динамической настройки регулятора, установленных для работы регулятора с исполнительным механизмом 9, а при генерировании прибором 1 команды по каналу 12 Меньше сигнал, эквивалентный логической 1, формируется на выходе 21 Меньше элемента 19 и через элементы 18 и 23 поступает на R-вход элемента 24, определяя на его выходе сигнал, эквивалентный логическому О, и выбор блоком 6 динамических параметров, установленных для работы регулятора с исполнительным механизмом 8.
Воздействие прибора 1 по каналу ,2 Меньше на исполнительный механизм 8 сопровождается изменением значения первого измеряемого параметра и при отклонении регулирукяцего клапана на байпасе подогревателя сетевой воды от закрытого положения датчик 11 переключает своим контактом 10 канал 7 воздействия Больше к исполнительному механизму 8, а на входы элементов 15 и 16 И от датчика 11 поступает сигнал, эквивалентный логическому О. С этого момента заданное значение регулируемого параметра поддерживается воздействием регулирующего прибора 1 на исполнительный механизм 8. При этом генерирование прибором 1 команды по каналу 7 воздействия Больше сопровождается формированием элементом 19 сигнала, эквивалентного логической 1, на выходе 20 Больше и воздействи ° «ем этого сигнала через элемент 16 И
и элемент 23 ИЛИ на R-вход элемента 24, а генерирование прибором 1 команды по каналу 12 воздействия Меньше сопровождается формированием элемен- 55 том 19 сигнала, эквивалентного логи ческой 1, на выходе 21 Меньше и воздействием этого сигнала через элемент 18 И и элемент 23 ШШ на
R-вход элемента 24, определяя сигнал, эквивалентный логическому О на выходе элемента 24 и выбор блоком 6 динамических параметров, установлен- ных для работы .регулятора с исполнительным механизмом 8.
Воздействие прибора -1 по каналу 7 воздействия Больите на. исполнительный механизм 8 сопровождается изме- нением измеряемого ведущего параметра и при полном закрытии регулирующего клапана датчик 11 переключает своим контактом 10 канал 7 воздействия Больше к исполйительному механизму 9, а на входы элементов 15 и 16 И от датчика 11 поступает сигнал, эквивалентный логической 1. В этом случае генерирование прибором 1 команды по каналу 7 воздействия Больше сопровождается формированием элементом 19 сигнала, эквивалентного логической 1, на его выходе 20 Больше и воздействием этого сигнала через элемент 15 И и элемент 22 ИЛИ на S-вход элемента 24, определяя сигнал, эквивалентный логической 1 на его выходе и выбор блоком 6 динамических параметров, установленных для работы регулятора с исполнитель-
Составитель М.Лазутов Редактор М.Келемеш Техред Г.Гербер Корректор В.Синицкая
Заказ 1901/29 Тираж 500Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно- полиграфическое предприятие,.г,Ужгород, ул.Проектная, 4
ным механизмом 9, а генерирований прибором 1 команды по каналу 12 воз- действия Меньше сопровождается формированием элементом 19 сигнала, эквивалентного логической 1, на его выходе 21 Меньше и воздействием этого сигнала через элемент 18 И и з лемент 23 ИЛИ на R-вход элемента 24, определяя сигнал, эквивалентньй логическому О, на его выходе и выбор блоком 6 динамических параметров, установленных для работы регулятора с исполнительным механизмом 8..
При дальнейшем увеличении основного параметра второй ведущий параметр также увеличивается и принимает, значение вьш1е предельного. Контакт 13 датчика 14 переключает канап 12 воздействия Меньше к исполнительному механизму 9, а на входы элементов 17 и 18 И от датчика 14 поступает сигнал, эквивалентный логической 1.
Предложенный способ подстройки динамических параметров регулятора позволяет установить оптимальные динамические параметры-регулятора при любых возможных режимах функцио- нирования системы регулирования,
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В ТОПКУ БАРАБАННОГО ПЫЛЕУГОЛЬНОГО КОТЛА | 2017 |
|
RU2649378C1 |
| Система автоматического регулирования процесса горения котла малой мощности с низкотемпературным кипящим слоем и способ ее работы | 2018 |
|
RU2692854C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАГРУЗКОЙ И ВЕНТИЛЯЦИЕЙ МЕЛЬНИЦЫ | 2015 |
|
RU2618346C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ КОЛОШНИКОВОГО ГАЗА ДОМЕННОЙ ПЕЧИ | 1997 |
|
RU2106411C1 |
| Устройство для автоматического управления процессами осушки и абсорбции обжигового газа | 1989 |
|
SU1655903A1 |
| Система регулирования температуры аэросмеси углеразмольной мельницы | 2015 |
|
RU2606083C1 |
| СПОСОБ УПРАВЛЕНИЯ ГТД | 2017 |
|
RU2638497C1 |
| Устройство для регулирования температуры и влажности | 1980 |
|
SU947844A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНЦЕНТРАЦИИ УГЛЕКИСЛОГО ГАЗА В ВОЗДУХЕ ТЕПЛИЦЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2034440C1 |
| Система регулирования теплофикационной турбоустановки | 1982 |
|
SU1100411A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
