Предлагаемое изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления ГТД.
Известен способ управления газотурбинным двигателем (ГТД), (Заявка RU 2009107968/06), заключающийся в том, что в электронном регуляторе (ЭР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ЭР формируют сигналы управления ЭР, которые подаются на исполнительный механизм (ИМ) электронного регулятора, в гидромеханическом регуляторе (ГМР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ГМР формируют сигналы управления ГМР, которые подаются на исполнительный механизм (ИМ) гидромеханического регулятора. При исправном ЭР с помощью селектора отсекают сигналы на исполнительный механизм ГМР и осуществляют управление двигателем от исполнительного механизма ЭР. При отказе ЭР с помощью селектора отсекают сигналы на исполнительный механизм ЭР и осуществляют управление двигателем от исполнительного механизма ГМР. Основным недостатком известного способа является необходимость иметь четыре исполнительных механизма: ИМ электронного регулятора, ИМ гидромеханического регулятора, механический узел селектора и электромагнитный клапан для его переключения. Это снижает надежность исполнительной части регуляторов, увеличивает их габаритные и весовые характеристики. Кроме того, исполнительные механизмы ЭР и ГМР имеют, как правило, различные статические и динамические характеристики, что не позволяет осуществлять оптимальное управление двигателем на всех режимах.
Цель предлагаемого способа управления двигателем - устранение указанных недостатков. Эта цель достигается тем, что в способе управления газотурбинным двигателем (ГТД), заключающемся в том, что в электронном регуляторе (ЭР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ЭР формируют сигналы управления ЭР и сигналы селектора, а в гидромеханическом регуляторе (ГМР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ГМР формируют сигналы управления ГМР, согласно предлагаемому способу сигналы управления ЭР, ГМР и сигналы селектора дополнительно преобразуют в пневматические сигналы, поступающие затем в дополнительно введенный струйный блок управления (СБУ), в котором при исправном ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ГМР, а сигналы управления ЭР подают на исполнительный механизм и осуществляют управление двигателем, при отказе ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ЭР, а сигналы управления ГМР подают на тот же исполнительный механизм и осуществляют управление двигателем.
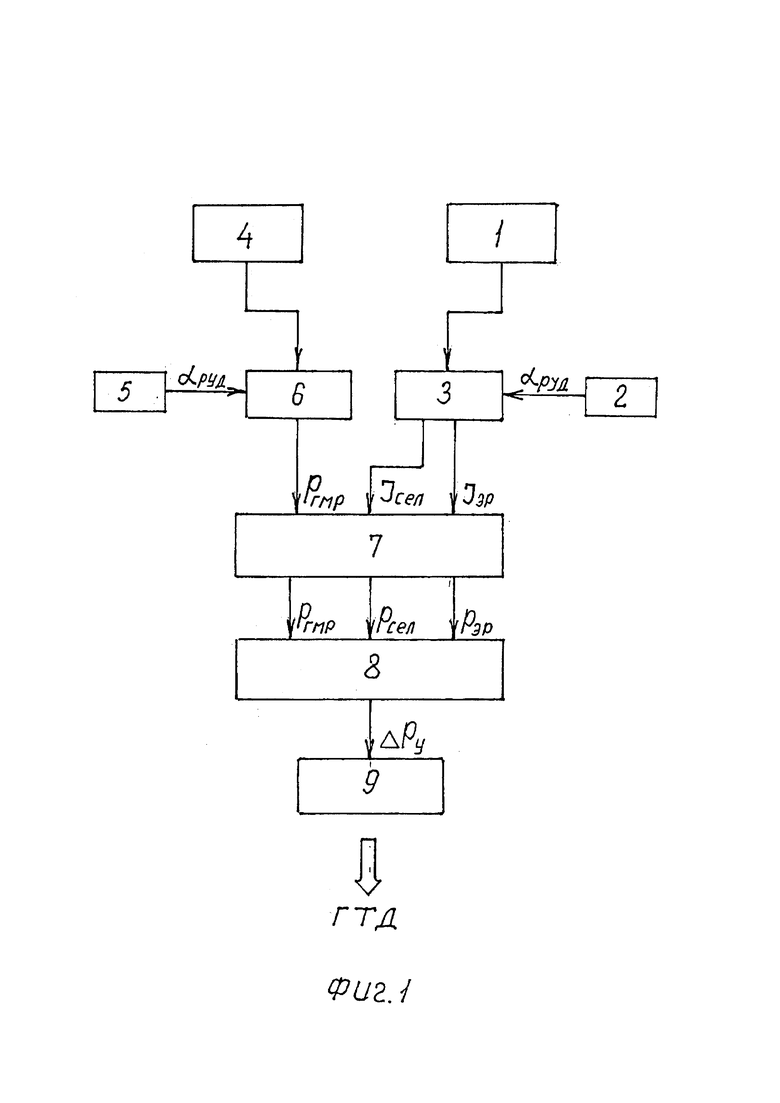
На фиг. 1 - блок-схема предлагаемого способа управления двигателем;
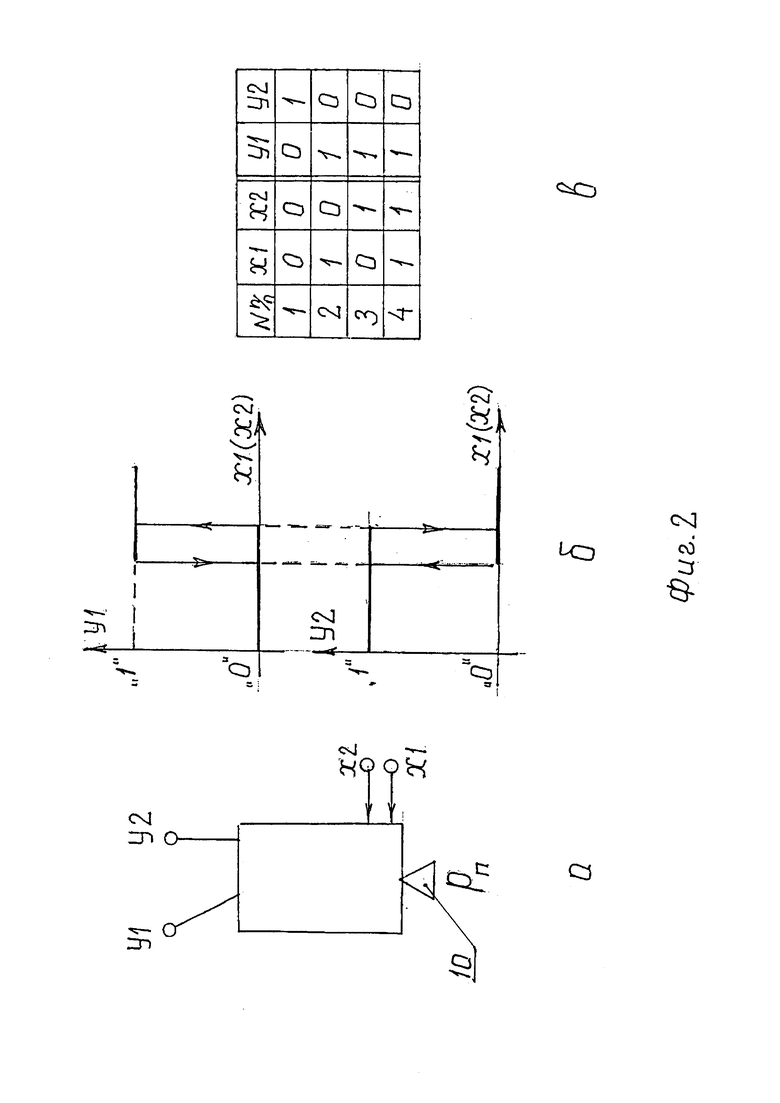
На фиг. 2а - условное обозначение струйного элемента;
На фиг. 2б - характеристика переключения струйного элемента;
На фиг.2в - таблица состояний сигналов струйного элемента, т.е. значения сигналов У1 и У2 на его выходе в зависимости от сочетания сигналов X1 и Х2 на его входе;
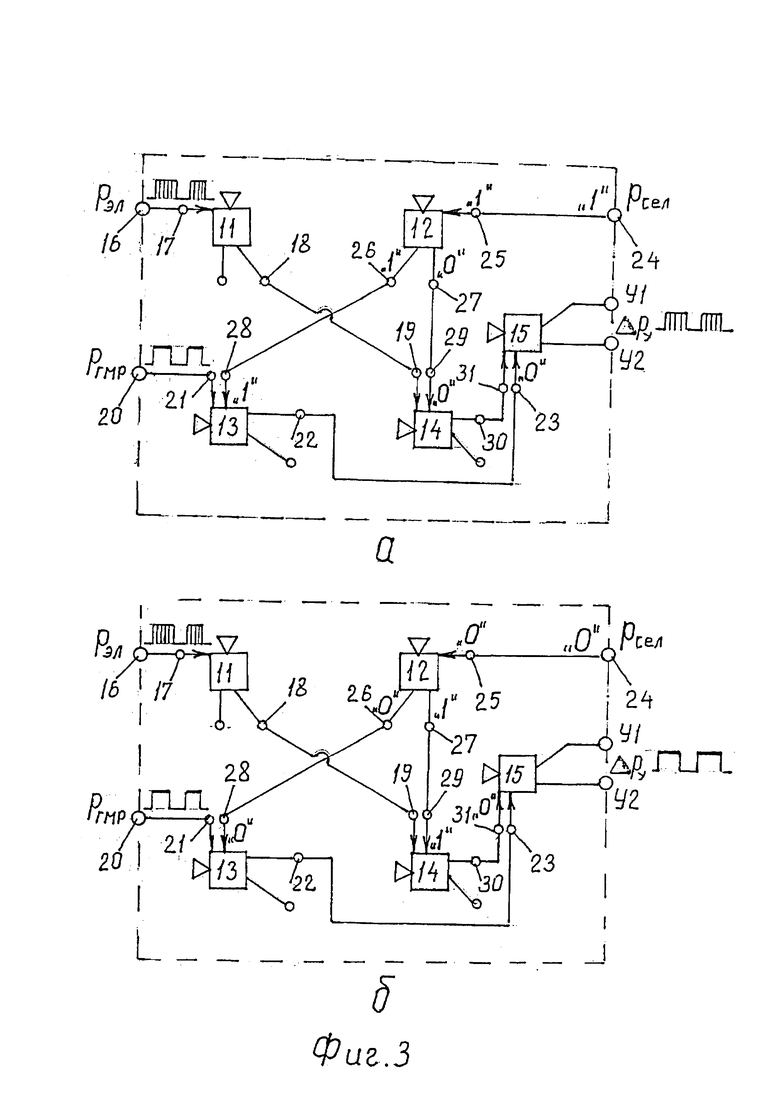
На фиг. 3а - логическая схема струйного блока управления (СБУ) в режиме работы ЭР;
На фиг. 3б - логическая схема струйного блока управления (СБУ) в режиме работы ГМР.
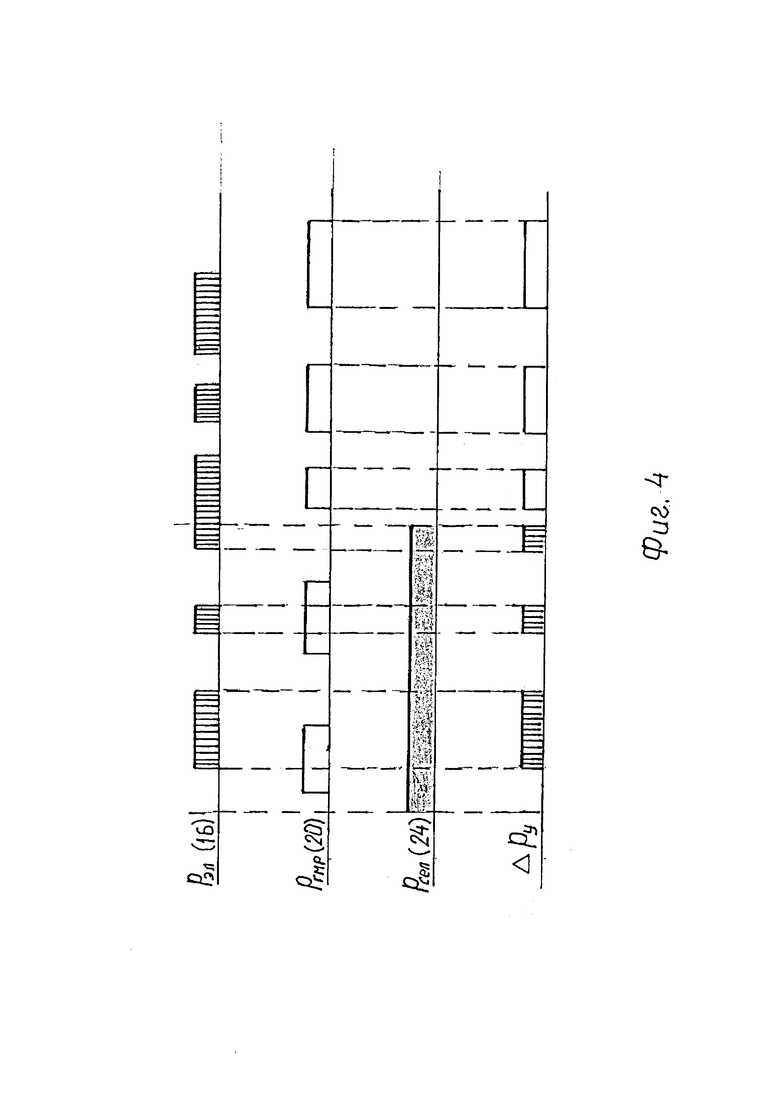
На фиг. 4 - циклограмма функционирования СБУ.
Предлагаемый способ управления содержит (фиг.1) блок 1 электрических датчиков параметров ГТД для ЭР, блок 2 электрического датчика РУД, блок 3 - ЭР, блок 4 датчиков параметров ГТД для ГМР, блок 5 датчика РУД для ГМР, блок 6 - ГМР, блок 7 пневмопреобразователей (БП), струйный блок управления 8 (СБУ), исполнительный механизм (ИМ) 9. Электрические сигналы блока 1 датчиков параметров ГТД и электрический сигнал блока 2 датчика РУД поступают на вход блока 3 - ЭР. В блоке 3 сигналы преобразуются по законам ЭР в управляющее воздействие IЭР и сигнал селекции IСЕЛ. Эти сигналы поступают на вход блока 7 пневмопреобразователей. Сигналы блока 4 датчиков параметров ГТД и сигнал блока 5 датчика РУД поступают на вход блока 6 - ГМР. В блоке 6 сигналы преобразуются по законам ГМР в управляющее воздействие, например механического, гидравлического или пневматического вида, который также поступает на вход блока 7 пневмопреобразователей. В блоке 7 сигналы ЭР и ГМР преобразуются в пневматические импульсные (ШИМ, ЧИМ) и релейные сигналы. Таким образом, на выходе блока 7 имеем: РЭР - импульсные сигналы электронного регулятора в пневматической форме, РСЕЛ - релейный сигнал селектора электронного регулятора в пневматической форме и Ргмр - импульсные сигналы гидромеханического регулятора в пневматической форме. Эти сигналы затем подаются на входы струйного блока управления 8 - (СБУ), который содержит струйные релейные элементы и предназначен для подключения по команде селектора РСЕЛ сигналы ЭР или ГМР к исполнительному механизму 9 в виде перепада давлений ΔРУ для управления параметрами двигателя. Струйный релейный элемент (фиг 2а) имеет сопло 10 с давлением питания Рп, один или два канала управления X1 и Х2 и два взаимно инверсных выходных канала У1 и У2. При этом выходной канал У1 называется прямым, а выходной канал У2 - инверсным. Характеристика переключения струйного релейного элемента (фиг. 2б) имеет два состояния: условно единичное - «1» (при наличии давления в выходном канале) и условно нулевое - «0» (при отсутствии давления в выходном канале). Состояние сигналов в выходных каналах У1 и У2 определяется сочетанием релейных или импульсных сигналов в каналах управления X1 и Х2 и выполняет логическую функцию ИЛИ-НЕ ИЛИ (см. таблицу состояний фиг. 2в). Блок 8 содержит (фиг. 3а, б) струйные релейные элементы 11 и 12 с одним каналом управления и двумя выходными каналами и струйные релейные элементы 13, 14 и 15 с двумя каналами управления и двумя выходными каналами. Импульсы РЭР ЭР поступают на вход 16 блока 8, подключенный к каналу управления 17 струйного элемента 11, с прямого выхода 18 которого эти импульсы подаются на вход 19 струйного элемента 14. Импульсы Ргмр поступают на вход 20 блока 8, подключенный к каналу управления 21 струйного элемента 13, с инверсного выхода 22 которого эти импульсы подаются на вход 23 струйного элемента 15. Сигнал РСЕЛ поступает на вход 24 блока 8, подключенный к каналу управления 25 струйного элемента 12, прямой выход 26 которого подключен к другому входу 28 струйного элемента 13. Инверсный выход 27 струйного элемента 12 подключен к другому входу 29 струйного элемента 14. Инверсный выход 30 струйного элемента 14 подключен к другому входу 31 струйного элемента 15, выходные каналы У1 и У2 которого являются выходами СБУ.
При исправном ЭР сигнал РСЕЛ селектора на входе 24 СБУ принимает единичное значение «1» (фиг. 3а). При этом единичное значение «1» устанавливается: на входе 25 струйного элемента 12, на его прямом выходе 26, на входе 28 струйного элемента 13, а нулевое значение «0» устанавливается: на инверсном выходе 27 струйного элемента 12, на входе 29 струйного элемента 14, на входе 23 струйного элемента 15. Таким образом, при РСЕЛ = 1, согласно таблице состояний (фиг 2в), на выход У1 и У2 СБУ проходит управляющее воздействие, формируемое по законам ЭР (заштрихованные импульсы), а управляющее воздействие ГМР (незаштрихованные импульсы) - блокируется (фиг. 4). При неисправном ЭР сигнал РСЕЛ селектора на входе 24 СБУ принимает нулевое значение «0» (фиг. 3б). При этом нулевое значение «0» устанавливается: на входе 25 струйного элемента 12, на его прямом выходе 26, на входе 28 струйного элемента 13 и на входе 31 струйного элемента 15, а единичное значение «1» устанавливается на инверсном выходе 27 струйного элемента 12 и на входе 29 струйного элемента 14. Таким образом, при РСЕЛ = 0, согласно таблице состояний (фиг 2в), на выход У1 и У2 СБУ проходит управляющее воздействие, формируемое по законам ГМР (незаштрихованные импульсы), а управляющее воздействие ЭР (заштрихованные импульсы) блокируется (фиг. 4).
Предлагаемый способ управления ГТД позволяет сочетать сложные законы регулирования ЭР с надежной исполнительной частью регулятора, исключает механический узел селектора, заменив его логической струйной схемой без подвижных деталей. Единый ИМ для ЭР и ГМР обеспечивает возможность более оптимального управления ГТД на всех режимах работы. Уменьшаются габаритно-весовые характеристики регуляторов, повышается их надежность за счет уменьшения или полного исключения сложных электрогидравлических преобразователей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2432475C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2425237C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления ГТД. Сигналы управления ЭР, ГМР и сигналы селектора затем преобразуют в пневматические сигналы, поступающие в струйный блок управления, в котором при исправном ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ГМР, а сигналы управления ЭР подают на исполнительный механизм и осуществляют управление двигателем, при отказе ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ЭР, а сигналы управления ГМР подают на тот же исполнительный механизм и осуществляют управление двигателем. Технический результат – обеспечение возможности оптимального управления ГТД на всех режимах работы. 4 ил.
Способ управления газотурбинным двигателем (ГТД), заключающийся в том, что в электронном регуляторе (ЭР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ЭР формируют сигналы управления ЭР и сигналы селектора, в гидромеханическом регуляторе (ГМР) в зависимости от положения рычага управления двигателем (РУД) и значений параметров двигателя по законам управления ГМР формируют сигналы управления ГМР, отличающийся тем, что сигналы управления ЭР, ГМР и сигналы селектора дополнительно преобразуют в пневматические сигналы, поступающие затем в дополнительно введенный струйный блок, в котором при исправном ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ГМР, а сигналы управления ЭР подают на исполнительный механизм и осуществляют управление двигателем, при отказе ЭР с помощью сигнала селектора и логической струйной схемы отсекают сигналы управления ЭР, а сигналы управления ГМР подают на тот же исполнительный механизм и осуществляют управление двигателем.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2468229C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| US 7406820 B2, 05.08.2008 | |||
| US 6321525 B1, 27.11.2001. | |||

