Изобретение относится к измерительной технике и может быть использовано для контроля знакопеременных линейных перемещений кинематических звеньев промьшшенных роботов и широком диапазоне скоростей.
Цель изобретения - обеспечение возможности контроля направления пе- р.емещений и повышение разрешающей способности .путем повьшения чувствительности магнитных головок.
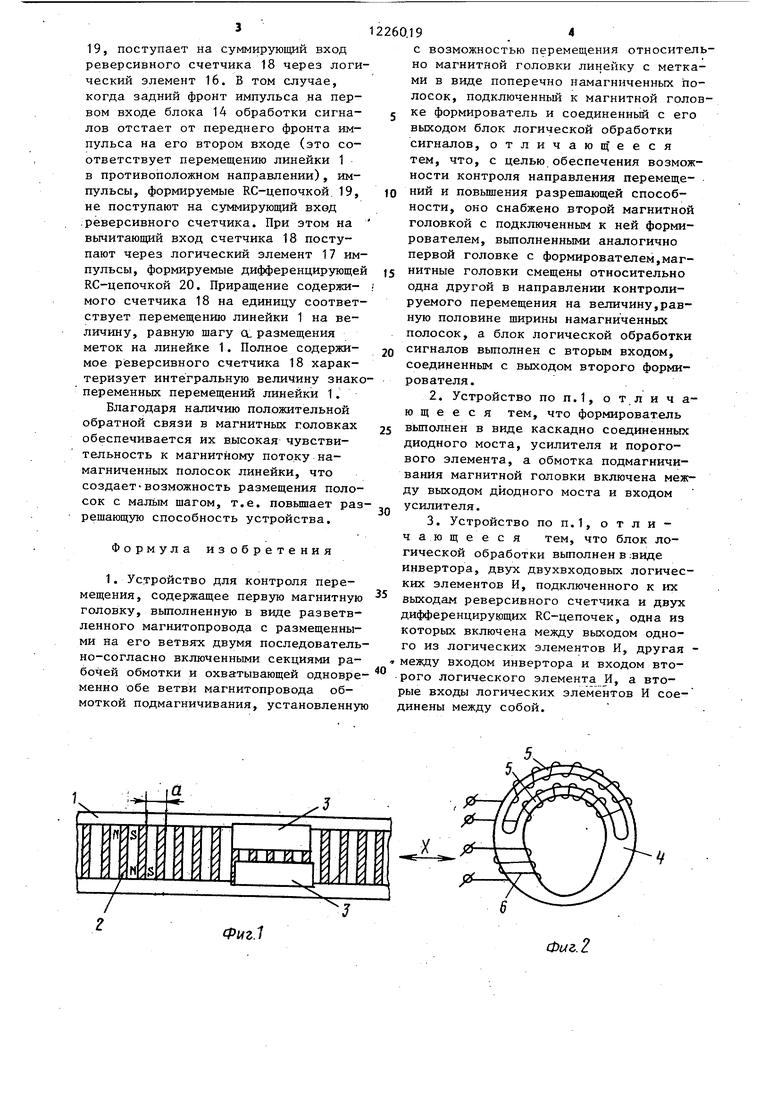
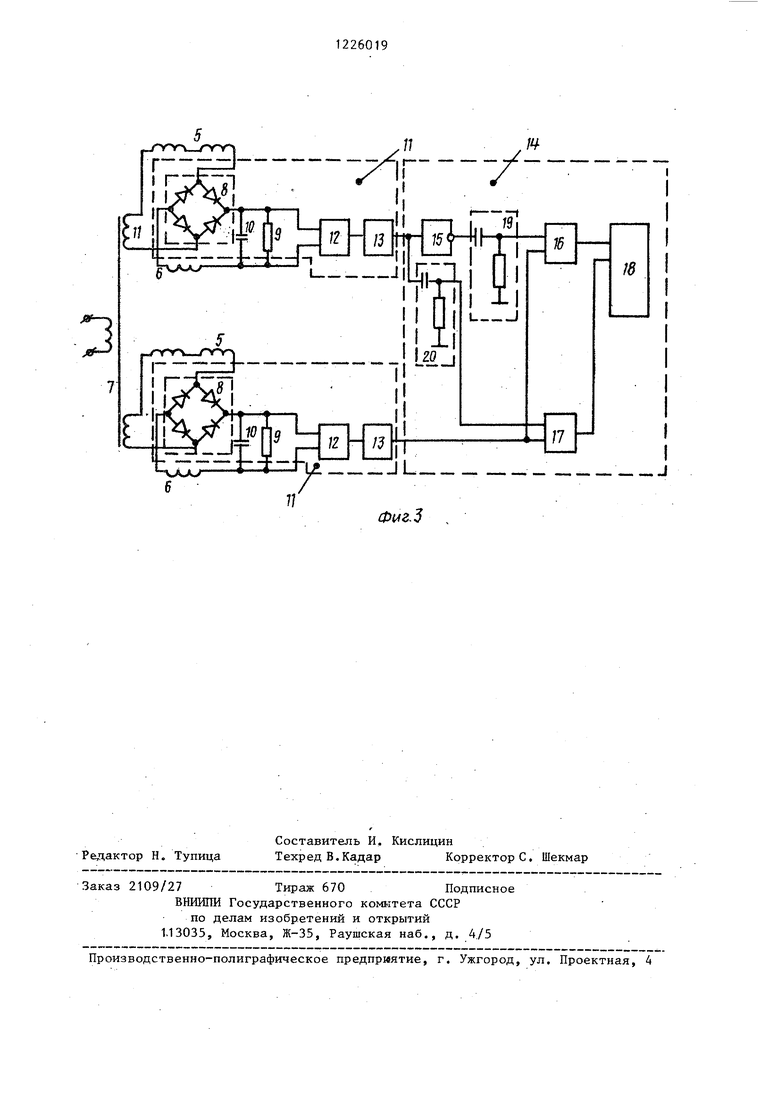
На фиг. 1 показано размещение магнитных головок устройства; на фиг.2 - их вьшолнение головок; на фиг. 3 - электрическая схема устройства.
Устройство для контроля перемещений содержит линейку 1 с нанесенньЕми на ней магнитными метками в виде поперечно, намагниченных полосок 2 и две магнитные головки 3, смещенные относительно одна другой вдоль направле- . ния контролируемых перемещений на величину,равную половине ширины намагниченных полосок 2.
40
реверсивного счетчика 18 и двух диф- ферен1,ирующих RC-цепочек 19 и 20. . Первая RC-цепочка включена между вы ходом инвертора 15 и одним из блоков логического элемента 16, а вторая RC-цепочка 20 - между входом инвертора 15 и одним из входов логическо элемента И 17. Вторые входы логичес ких элементов И 16 и 17 соединены между собой и образуют первьй вход .блока 14 логической обработки сигналов. Его вторым входом является вход инвертора 15.
Устройство для контроля перемеще- 15 НИИ работает следующим образом.
При перемещении линейки 1 ее полоски 2.оказываются в области зазора магнитных головок 3. Создаваемый полосками 2 постоянный магнитный поток вызывает намагничивание магнито- провода 4, что приводит к уменьшению эффективной магнитной проницаемости материала магнитопровода, и, следовательно, - к уменьшению индуктив20
Магнитные головки 3 (фиг. 2) вьшол- ности рабочей обмотки 5. Постоянньш
ток в выходной диагонали диодного моста 8 при этом возрастает.
нены в виде разветвленного в верхней части 0-образного магнитопровода 4. Б-нижней части магнитопровода 4 со стороны линейки 1 выполнен радиальный воздушный зазор. На каждой, из ветвей магнитопровода 4 размещены секции рабочей обмотки 5, включенные (у собой последовательно-согласно. На нижней.части магнитопровода 4 разток в выходной диагонали диодного моста 8 при этом возрастает.
Протекая по обмотке 6 подмагничи- вания., этот ток вызывает дополни- 30 тельное подмагничивание магнитопровода 4, что приводит к лавинообразному возрастанию тока выходной диагонали моста 8 (положительная обратная связь) и к появлению на выходе формещена обмотка 6 подмагничивания, ох- 35 мирователей 11 импульсов напряжения
с нормированными амплитудой и крутизной фронта.
Длительность импульсов равна времени, в течение которого намагничанватывающая обе. его ветви. К одному из вьтодов рабочих обмоток 5 каждой магнитной головки 3 подключен своими вторичными обмотками трансформатор 7 питания (фиг. 3). Между свободными вьтодами рабочих обмоток 5 и вторичных обмоток трансформатора 7 включены диодные мосты 8. К выходным диагоналям каяздого диодного моста 8 подключены последовательно соединенные между собой обмотка 6 подмагничивания и фильтр, вьтолнениые в. виде па- раллель но соединенных между собой резистора 9 и конденсатора 10. К вы40 ная полоска 2 находится против зазора магнитной головки 3. Вследствие того, что магнитные головки 3 смещены относительно одна другой в направлении X контролируемого перемещения,
45 импульсы на выходе формирователей 11 также сдвинуты между собой по фазе, причем знак угла сдвига фаз зависит от направления перемещения линейки 1. Импульсы с выхода формирователей
ходам каждого фильтра подключены вхо- 50 11 поступают на входы блока 14 логи- дящие в формирователи 11 и соединен- ческой обработки сигналов.
ные каскадно усилитель 12 и пороговый элемент 13. К выходам пороговых элементов 13 подключен двухвходовый блок 14 логической обработки сигналов.Он вьшолнен в виде инвертора 15, двух двухвходовых логических элементов И 16 и 17, подключенного к их выходам
реверсивного счетчика 18 и двух диф- ферен1,ирующих RC-цепочек 19 и 20. . Первая RC-цепочка включена между выходом инвертора 15 и одним из блоков логического элемента 16, а вторая RC-цепочка 20 - между входом инвертора 15 и одним из входов логического элемента И 17. Вторые входы логических элементов И 16 и 17 соединены между собой и образуют первьй вход .блока 14 логической обработки сигналов. Его вторым входом является вход инвертора 15.
Устройство для контроля перемеще- 5 НИИ работает следующим образом.
При перемещении линейки 1 ее полоски 2.оказываются в области зазора магнитных головок 3. Создаваемый полосками 2 постоянный магнитный поток вызывает намагничивание магнито- провода 4, что приводит к уменьшению эффективной магнитной проницаемости материала магнитопровода, и, следовательно, - к уменьшению индуктив0
ности рабочей обмотки 5. Постоянньш
ток в выходной диагонали диодного моста 8 при этом возрастает.
Протекая по обмотке 6 подмагничи- вания., этот ток вызывает дополни- тельное подмагничивание магнитопровода 4, что приводит к лавинообразному возрастанию тока выходной диагонали моста 8 (положительная обратная связь) и к появлению на выходе форная полоска 2 находится против зазора магнитной головки 3. Вследствие того, что магнитные головки 3 смещены относительно одна другой в направлении X контролируемого перемещения,
импульсы на выходе формирователей 11 также сдвинуты между собой по фазе, причем знак угла сдвига фаз зависит от направления перемещения линейки 1. Импульсы с выхода формирователей
В том случае, если задний фронт импульса на его первом входе (вход инвертора 15) опережает передний 55 фронт импульса на его втором ходе (соединенных входах логических элементов 16 и 17), к ратковременный импульс, формируемый RC-цепочкой
19, поступает на суммирующий вход реверсивного счетчика 18 через логический элемент 16. В том случае, когда задний фронт импульса на первом входе блока 14 обработки сигналов отстает от переднего фронта импульса на его втором входе (это соответствует перемещению линейки 1 в противоположном направлении), импульсы, формируемые КС-цепочкой. 19, не поступают на суммирующий вход .реверсивного счетчика. При этом на вычитающий вход счетчика 18 поступают через логический элемент 17 импульсы, формируемые дифференцирующей RC-цепочкой 20. Приращение содержи- мого счетчика 18 на единицу соответствует перемещению линейки 1 на величину, равную шагу о, размещения меток на линейке 1. Полное содержимое реверсивного счетчика 18 характеризует интегральную величину знако переменных перемещений линейки 1.
Благодаря наличию положительной обратной связи в магнитных головках обеспечивается их высокая чувствительность к магнитному потоку намагниченных полосок линейки, что создает-возможность размещения полосок с мальм шагом, т.е. повышает разрешающую способность устройства.
Формула изобретения
1. Устройство для контроля перемещения, содержащее первую магнитную головку, выполненную в виде разветвленного магнитопровода с размещенными на его ветвях двумя последовательно-согласно включенньми секциями рабочей обмотки и охватывающей одновременно обе ветви магнитопровода обмоткой подмагничивания, установленную
10
IS
20
; -
ю
25
30
35
С возможностью перемещения относительно магнитной головки линейку с метками в виде поперечно намагниченных полосок, подключенный к магнитной головке формирователь и соединенный с его выходом блок логической обработки сигналов, отличаю щ ееся тем, что, с целью обеспечения возможности контроля направления перемещений и повьшхения разрешающей способности, оно снабжено второй магнитной головкой с подключенным к ней формирователем, выполненными аналогично первой головке с формирователем,магнитные головки смещены относительно одна другой в направлении контролируемого перемещения на величину,равную половине ширины намагниченных полосок, а блок логической обработки сигналов вьшолнен с вторым входом, соединенным с выходом второго формирователя.
2.Устройство по П.1, о т л и ч а- ю щ е е с я тем, что формирователь вьшолнен в виде каскадно соединенных диодного моста, усилителя и порогового элемента, а обмотка подмагничивания магнитной головки включена между выходом диодного моста и входом усилителя.
3.Устройство по П.1, отличающееся тем, что блок логической обработки выполнен в ;виде инвертора, двух двухвходовых логических элементов И, подключенного к их выходам реверсивного счетчика и двух дифференцирующих RC-цепочек, одна из которых включена между выходом одного из логических элементов И, другая г между входом инвертора и входом вто- .рого логического элемента И, а вторые входы логических элементов И соединены между собой.
Фиг.1
Фи&.2
-Л--/
w
Ir 1&ЩЭ
vZL- 1
15
19
16
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения объекта | 1983 |
|
SU1290374A1 |
| Регулируемый преобразователь напряжения | 1986 |
|
SU1394366A1 |
| Станок для бурения взрывных скважин | 1989 |
|
SU1670110A1 |
| Преобразователь частоты | 1991 |
|
SU1758804A1 |
| Цифровой преобразователь перемещения | 1981 |
|
SU955154A1 |
| Статический возбудитель электрических машин | 1991 |
|
SU1786618A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОДНОФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2013 |
|
RU2542717C2 |
| Трехфазный инвертор напряжения | 1987 |
|
SU1464272A1 |
| Формирователь импульсов | 1975 |
|
SU553736A1 |
| Автономный инвертор | 1982 |
|
SU1072221A1 |
Изобретение относится к измерительной технике и позволяет повысить разрешающую способность устройства для контроля перемещений и обеспечивает возможность контроля направления перемещений. Устройство содержит две магнитные головки, установленную с возможностью перемещения относительно них Линейку с магнитными мет- ками в виде намагниченных полосок, подключенные к магнитным головкам формирователи и подключенный к выходам формирователей блок логической обработки сигналов. Магнитные головки смещены относительно одна другой вдоль оси контролируемых перемещений на величину, равную половине ширины намагниченных полосок. Блок логической обработки сигналов включает в себя реверсивный счетчик и логичес кие элементы И. В момент времени, когда намагниченная полоска линейки находится напротив зазоров магнитных головок, каждый из связанных с ними формирователей формирует импульс равный по длительности времени нахождения полоски в области зазора магнитной головки. Благодаря установке головок со смещением импульсы на выходе формирователей сдвинуты по фазе относительно один другого. В зависимости от направления перемещения линейки задний фронт импульса на выходе одного формирователя может отставать от переднего фронта импульса другого формирователя либо опережать его. Соответственно счетные импульсы, формируемые в блоке логической обработки дифференцирующими цепочками, поступают на суммирующий вход реверсивного счетчика либо на его вычитающий вход,Содержимое счетчика однозначно определяет величину перемещения и его направление. Магнитные головки устройства работают в режиме магнитного усилителя и охвачены положительной обратной связью. Благодаря этому повьш1а- ется их чувствительность и может : быть увеличена плотность записи магнитных меток (полосок) на линейке. В результате достигается повьштение разрешающей способности устройства. 2 з.п. ф-лы, 3 ил. § (Л to to О5 со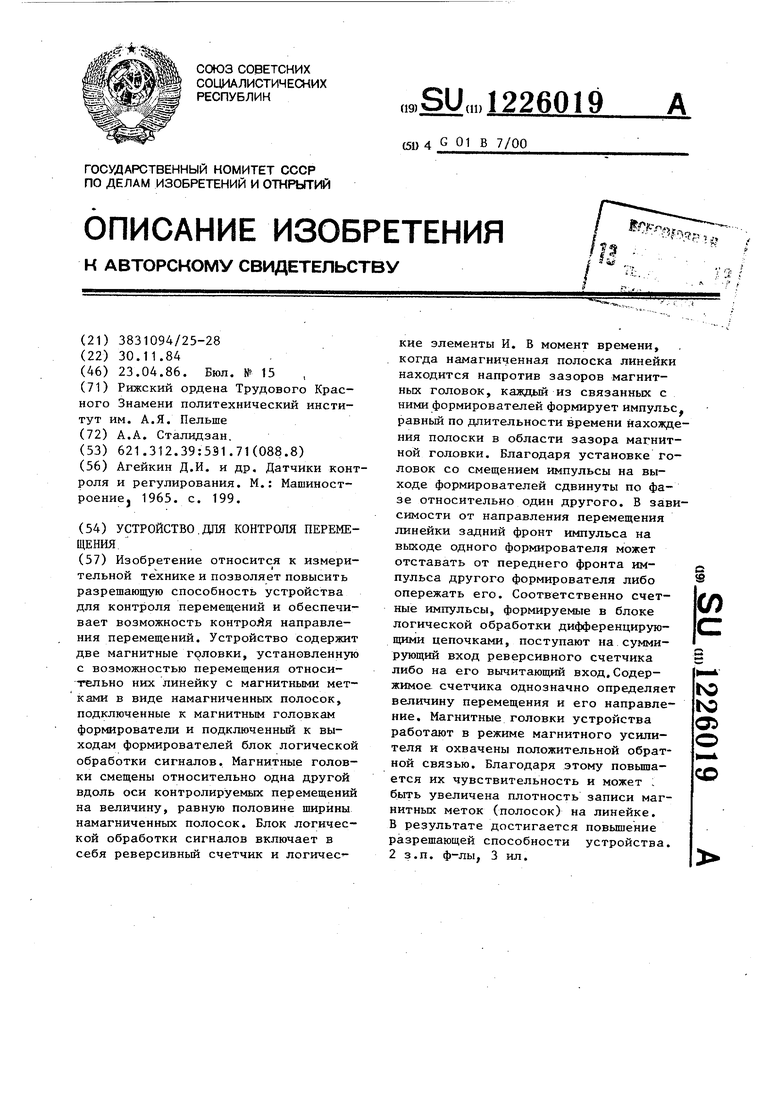
JL
,I
.З
Редактор H. Тупица
Составитель И, Кислицин
Техред В.Кадар Корректоре. Шекмар
Заказ 2109/27Тираж 670Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 1,13035, Москва, Ж-35, Раушская наб., д. 4./5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Агейкин Д.И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| М.: Машиностроение, 1965 | |||
| с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
