Изобретение относится к автоматике и вычислительной технике и может быть использовано, например, в блоках управления исполнительными механизмами.
Целью изобретения является повышение точности определения положения объекта.
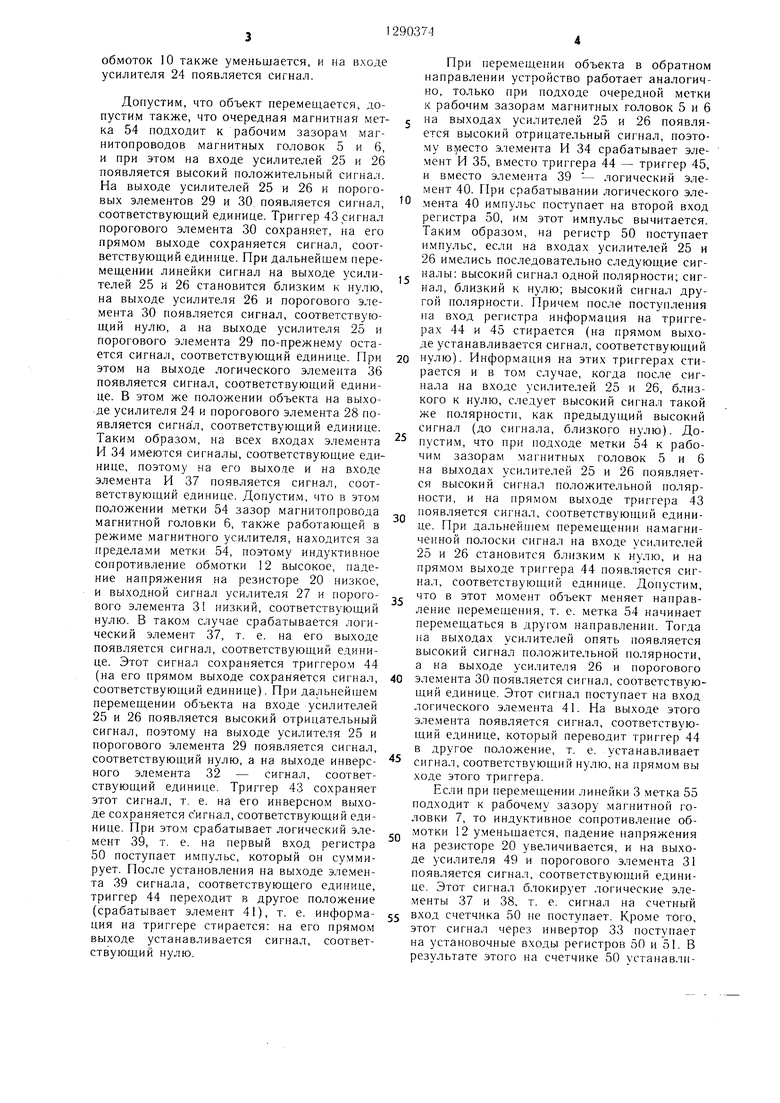
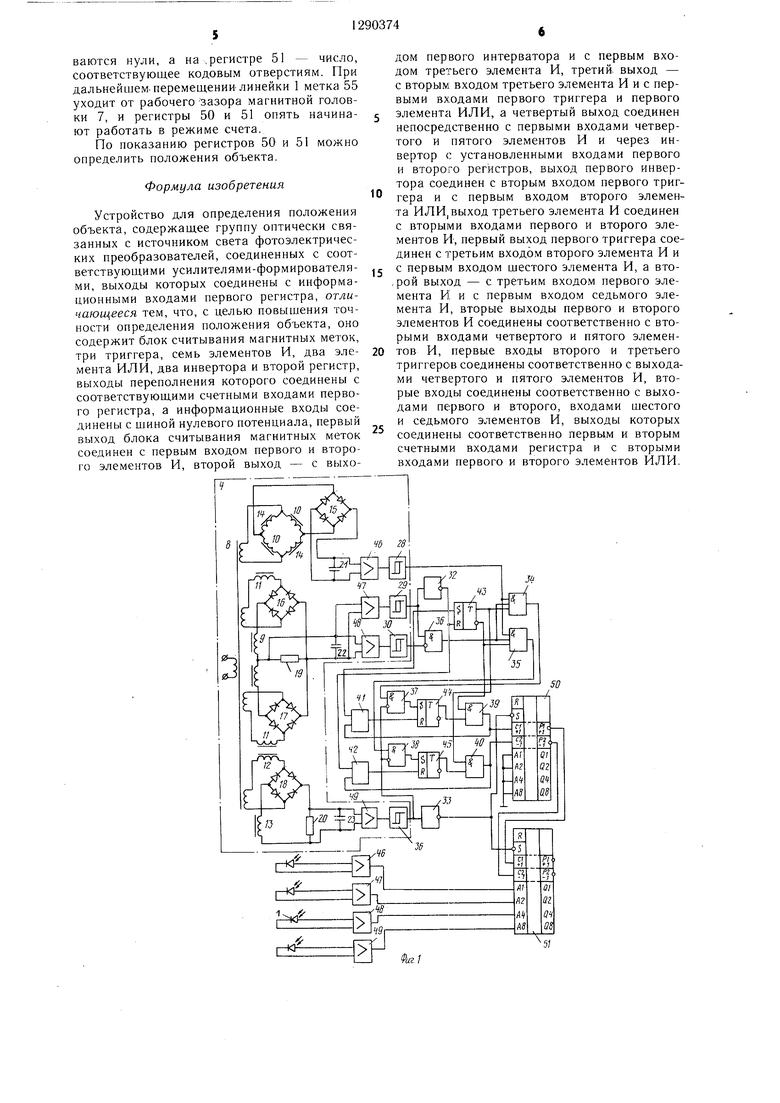
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - схем:а расположения фотоэлектрических и магнитных головок; па фиг. 3 - эскиз магнитных головок.
Устройство содержит фотоэлектрические преобразователи 1, источники 2 света, ли- нейка 3 кодовых отверстий и магнитных меток, блок 4 считывания магнитных меток, первая 5, вторая 6 и третья 7 магнитные головки, трансформатор 8, обмотки 9- 13 головок считывания, дроссели 14, двух- полупериодные выпрямители 15 -i8, резисторы 19 и 20, конденсаторы 21-23, усили-. тели 24-27 сигналов считывания магнитных меток, пороговые элементы 28-31, инверторы 32 и 33, элементы И 34-40, элементы ИЛИ 41 и 42, триггеры 43-45, усилители-формирователи 46-49, регистры 50 и 51, магнитопровод 52 магнитных головок. На фиг. 2 обозначены кодовые отверстия 53, магнитные метки 54 и 55 и магнитные дорожки 56 и 57.
Устройство работает следующим образом.
Но мере возможного перемещения считывающих элементов и объекта, положение которого необходимо определить, на выходах усилителей-формирователей 46-49 формируются двууровневые сигналы, соответствующие кодовым отверстиям 53.
Блок 4 считывания магнитных меток выполнен на основе магнитных головок 5 и 6, расположенных на дорожке 56, и магнитной головки 7, расположенной на дорожке 57. Рабочие зазоры магнитных головок 5 и 6 смещены между собой на величину, равную половине ширины магнитной метки. Каждая магнитная головка 5 и 6 снабжена магнитопроводом 52 с двумя ветвями. Эти магнитные головки имеют обмотки 9 и 10, состоящие из двух половин, намотанных на отдельных ветвях магнито- провода 52 с противоположным направлением витков, а также обмотку 1 1, тоже сос- тояпд.ую из двух половин, намотанных на отдельных ветвях магнитопровода с противоположным направлением намотки. Кроме того, магнитные головки 5 и 6 имеют обмотку обратной связи, намотанную на обеих ветвях магнитопровода. Магнитная головка 7 тоже имеет разветвленный .магнитопровод и обмотку 12, аналогичную обмотке обратной связи 13, аналогичную обмотке 11. Обмотки 9 обеих магнитных головок 31 подключены к источнику переменного тока через вторичные обмотки трансформатора 8 и через двухполунериодные выпрямители i6 и 17 и обмотку 11 обратной связи под0
5
0
5
0
0
0
5
ключены встречно к резистору 19, т. е. включены дифференциально. Обмотки 10 обеих магнитных головок 5 и 6 включены EJ мостовую схему с дросселями 14 в качестве противоположных плечей, выход которой подключен через двухполупериодный выпрямитель к конденсатору 21. Мостовая схема подключена к обмотке трансформатора 8. Обмотка 12 магнитной головки подключена F; источнику временного тока через вторичную обмотку трансформатора 8 и через двухполупериодный выпрямитель 18 и обмотку обратной связи 13 подключена к резистору 20.
В зависимости от положения линейки 3 .меняется намагниченность .магнитопроводов 52 головок 5 и 6 магнитным полем, создаваемым метками 54. Магнитные головки 5 и 6 работают в режиме магнитного усилителя с положительной обратной связью. С увеличением намагниченности магнитопроводов головок 5 и 6 индуктивное сопротивление обмоток 9 уменьшается, поэтому ток в обмотках 9 и 11 и в резисторе увеличивается, падением напряжения на резисторе 19 также увеличивается намагниченность магнитопроводов, в результате чего дополнительно возрастает ток в обмотках и в резисторе 19, т. е. действует положительная обратная связь. Поскольку обмотки 19 обеих магнитных головок 5 и 6 через выпрямители 16 и 17 обмотки 11 подключены к резистору 19 встречно (по дифференциальной схеме), то падение напряжения на резисторе 19, т. е. сигнал на входе усилителей 25 и 26 может иметь следующие значения: высокое положительной полярности, если индуктивное сопротивление верхней (по фиг. i) об.мотки 9 низкое, в нижней высокое, т. е. рабочий зазор магнитопроводов одной из головок 5 и 6 находится на намагниченной метке 54, а другой - между метками; высокое отрицательной полярности, если индуктивное со- иротивлепие нижней обмотки 9 низкое, а верхней высокое; б.аизкое к нулю, если индуктивное сопротивление обеих обмоток одинаков з, т. е. рабочие зазсфы магнитопроводов магнитных головок расположены или оба на намагниченной метке, или оба за ее пределами.
Если падение напряжения па резисторе 19 больше положительной полярности, то на выходах усилителей 25 и 26 сигнал высокий, т. е соответствует единице. Если падение напряжения больше отрицательной полярност и, то сигнал на выходах усилителей низкий, соответствующий нулю, а если падение напряжения на резисторе низкое (близкое к нулю), то сигнал на выходах усилителя 25 низкий (соответствующий нулю), а па выходе усилителя 26 высокий (соответствующий единице).
При увеличении намагниченности маг- гштопроводов индуктивное сопротивление
обмоток 10 также уменьшается, и на входе усилителя 24 появляется сигнал.
Допустим, что объект перемещается, допустим также, что очередная магнитная метка 54 подходит к рабочим зазорам маг- нитопроводов магнитных головок 5 и 6, и при этом на входе усилителей 25 и 26 появляется высокий положительный сигнал. На выходе усилителей 25 и 26 и пороговых элементов 29 и 30. появляется сигнал, соответствующий единице. Триггер 43 сигнал порогового элемента 30 сохраняет, на его прямом выходе сохраняется сигнал, соответствующий единице. При дальнейшем перемещении линейки сигнал на выходе усилителей 25 и 26 становится близким к нулю, на выходе усилителя 26 и порогового элемента 30 появляется сигнал, соответствующий нулю, а на выходе усилителя 25 и порогового элемента 29 по-прежнему остается сигнал, соответствующий единице. При этом на выходе логического элемента 36 появляется сигнал, соответствующий единице. В этом же положении объекта на выходе усилителя 24 и порогового элемента 28 появляется сигна л, соответствующий единице. Таким образом, на всех входах элемента П 34 имеются сигналы, соответствующие единице, поэтому на его выходе и на входе элемента И 37 появляется сигнал, соот- ветствуюн ий единице. Допустим, что в этом положении метки 54 зазор магнитопровода магнитной головки 6, также работающей в режиме .магнитного усилителя, находится за пределами метки 54, поэтому индуктивное сопротивление обмотки 12 высокое, падение напряжения на резисторе 20 низкое, и выходной сигнал усилителя 27 и порогового элемента 31 низкий, соответствующий нулю. В таком случае срабатывается логический элемент 37, т. е. на его выходе появляется сигнал, соответствующий единице. Этот сигнал сохраняется триггером 44 (на его прямом выходе сохраняется сигнал, соответствующий единице). При дальнейшем перемещении объекта на входе усилителей 25 и 26 появляется высокий отрицательный сигнал, поэтому на выходе усилителя 25 и порогового элемента 29 появляется сигнал, соответствующий нулю, а на выходе инверсного элемента 32 - сигнал, соответ- cтвyюпJ,ий единице. Триггер 43 сохраняет этот сигнал, т. е. на его инверсном выходе сохраняется с игнал, соответствующий единице. При это.м срабатывает логический элемент 39, т. е. на первый вход регистра 50 поступает импульс, который он су.мми- рует. После установления на выходе элемента 39 сигнала, соответствующего единице, триггер 44 переходит в другое положение (срабатывает элемент 41), т. е. информация на триггере стирается: на его прямом выходе устанавливается сигнал, соответ- ствуюпдий нулю.
При перемещении объекта в обратном направлении устройство работает аналогично, только при подходе очередной метки к рабочим зазорам магнитных головок 5 и 6 ,; на выходах усилителей 25 и 26 появляется высокий отрицательный сигнал, поэто- .му вместо э. 1емента И 34 срабатывает элемент И 35, вместо триггера 44 - триггер 45, и вместо элемента 39 -- логический элемент 40. При срабатывании логического элеО .мента 40 импульс поступает на второй вход регистра 50, им этот импульс вычитается. Таким образом, на регистр 50 поступает импульс, если на входах усилителей 25 и 26 имелись последовательно следующие сигналы: высокий сигнал одной полярности; сигнал, близкий к нулю; высокий сигнал другой полярности. Причем после поступления на вход регистра информация на триггерах 44 и 45 стирается (на прямом выходе устанавливается сигнал, соответствующий
0 нулю). Информация на этих триггерах стирается и в том случае, когда после сигнала на входе усилителей 25 и 26, близкого к нулю, следует высокий сигнал такой же полярности, как предыдун ий высокий сигнал (до сигнала, близкого нулю). Допустим, что при подходе метки 54 к рабочим зазорам магнитных головок 5 и 6 на выходах усилителей 25 и 26 появляется высокий сигнал положительной полярности, и на прямом выходе триггера 43 появляется сигнал, соответствующий единице. При дальнейп ем перемещении намагниченной полоски сигнал на входе усилителей 25 и 26 становится близким к нулю, и на прямом выходе триггера 44 появляется сигнал, соответствующий единице. Допустим,
что в этот момент объект меняет направление перемещения, т. е. метка 54 начинает перемещаться в другом направлении. Тогда на выходах усилителей опять появляется высокий сигнал положительной полярности, а на выходе усилителя 26 и порогового
0 элемента 30 появляется сигнал, соответствующий единице. Этот сигнал поступает на вход логического элемента 41. На выходе этого эле.мента появляется сигнал, соответствующий единице, который переводит триггер 44 в другое положение, т. е. устанавливает сигнал, соответствующий нулю, на прямом вы ходе этого триггера.
Если при перемещении линейки 3 метка 55 подходит к рабочему зазору магнитной головки 7, то индуктивное сопротивление обмотки 12 уменьшается, падение напряжения на резисторе 20 увеличивается, и на выходе усилителя 49 и порогового элемента 31 появляется сигнал, соответствующий единице. Этот сигнал блокирует логические элементы 37 и 38, т. е. сигнал на счетный
5 вход счетчика 50 не поступает. Кроме того, этот сигнал через инвертор 33 поступает на установочные входы регистроЕ 50 и 51. В результате этого на счетчике 50 устанавлн5
0
ваются нули, а на .регистре 51 - число, соответствующее кодовым отверстиям. При дальнейшем-перемещении линейки 1 метка 55 уходит от рабочего Зазора магнитной головки 7, и регистры 50 и 51 опять начинают работать в режиме счета.
По показанию регистров 50 и 51 можно определить положения объекта.
Формула изобретения
Устройство для определения положения объекта, содержащее группу оптически связанных с источником света фотоэлектрических преобразователей, соединенных с соответствующими усилителями-формирователя- ми, выходы которых соединены с информационными входами первого регистра, отличающееся тем, что, с целью повышения точности определения положения объекта, оно содержит блок считывания магнитных меток, три триггера, семь элементов И, два элемента ИЛИ, два инвертора и второй регистр, выходы переполнения которого соединены с соответствующими счетными входами первого регистра, а информационные входы соединены с шиной нулевого потенциала, первый выход блока считывания магнитных меток соединен с первым входом первого и второго элементов И, второй выход - с выхо
0
дом первого интерватора и с первым входом третьего элемента И, третий, выход - с вторым входом третьего элемента И и с первыми входами первого триггера и первого элемента ИЛИ, а четвертый выход соединен непосредственно с первыми входами четвертого и пятого элементов И и через инвертор с установленными входами первого и второго регистров, выход первого инвертора соединен с вторым входом первого триггера и с первым входом второго элемента ИЛИ,выход третьего элемента И соединен с вторыми входами первого и второго элементов И, первый выход первого триггера соединен с третьим входом второго элемента И и с первым входом щестого элемента И, а вто- .. рой выход - с третьим входом первого элемента И и с первым входом седьмого элемента И, вторые выходы первого и второго элементов И соединены соответственно с вторыми входами четвертого и пятого элементов И, первые входы второго и третьего триггеров соединены соответственно с выходами четвертого и пятого элементов И, вторые входы соединены соответственно с выходами первого и второго, входами щестого и седьмого элементов И, выходы которых соединены соответственно первым и вторым счетными входами регистра и с вторыми входами первого и второго элементов ИЛИ.
51
54
56
Составитель Н. Ми.пяев
Редактор Э. СлиганТехред И. ВересКорректор М. Пожо
Заказ 7906/50Тираж 694Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предпри ятио, г. Ужгород, ул. Проектная, 4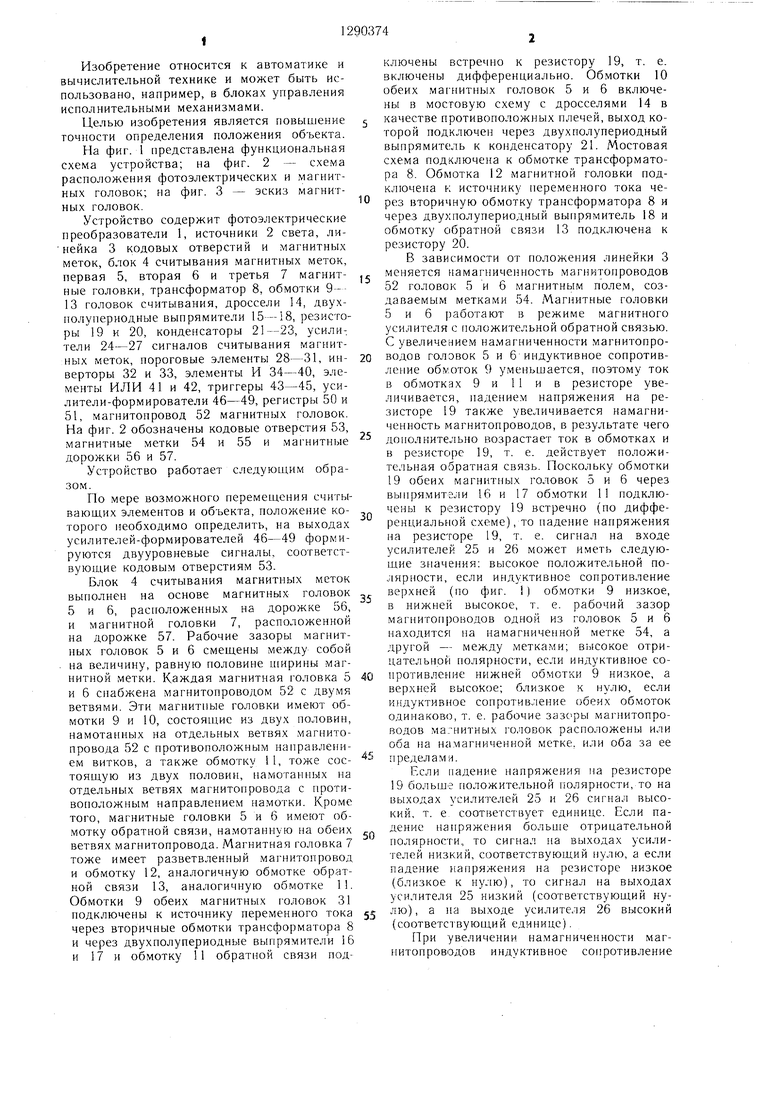
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема информации с ферромагнитного колеса железнодорожного транспортного средства | 1988 |
|
SU1588617A1 |
| Устройство для контроля перемещения | 1984 |
|
SU1226019A1 |
| Устройство для измерения перемещения реверсивно движущихся ферромагнитных изделий | 1981 |
|
SU998848A1 |
| Устройство для измерения перемещений | 1989 |
|
SU1626080A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ МАГНИТНОЙ ЗАПИСИ ИНФОРМАЦИИ НА ВИДЕОМАГНИТОФОНЕ | 1993 |
|
RU2042218C1 |
| Устройство воспроизведения двоичных сигналов с магнитного носителя | 1981 |
|
SU991494A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И РЕГЕНЕРАЦИИ МАГНИТНЫХ МЕТОК ГЛУБИНЫ | 1991 |
|
RU2013536C1 |
| Устройство для контроля перемещений | 1987 |
|
SU1464036A1 |
| Устройство для контроля деталей из магнитомягкого материала по величине коэрцитивной силы | 1989 |
|
SU1691799A1 |
| Устройство для определения параметров сложного сигнала | 1986 |
|
SU1368792A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано, например, в блоках управления исполнительными механизмами. Целью изобретения является повышение точности определения положения объекта. Для этого в устройство введен блок считывания магнитных меток, логические элементы, триггеры и второй регистр, обеспечиваюш,ие считывание магнитных меток, подсчет их и временное хранение. При переполнении второго регистра импульс с его выхода переполнения записывает в первый регистр состояние старших разрядов считываемого кода. Логический блок обеспечивает также определение направления движения объекта и соответствующим образом изменяет направление счета второго регистра (сложение или вычитание) . 3 ил. N5 СО о 00 
| Патент США № 3310798, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
| Патент США № 3713139, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
