Изобретение относится к области методов экспериментального исследова ния механических параметров стержневых конструкций и может быть использовано при обследовании стержневых конструкций в строительстве, машиностроении, энергетике, а также для неразрушающего производственного контроля таких конструкций.
Стержень в известной конструкции назависимо от используемой расчетной схемы (ферма, рама) имеет по концам закрепления, препятствующие повороту его торцовых сечений. Величина жесткости этих закреплений зависит от качества изготовления и сборки конструкций, а затем от ее состояния в эксплуатационнных условиях, а также ею определяется степень защемленност стержня в конструкции, влияющая на поведение стержня под нагрузкой и его несущую способность при продольном и поперечном изгибе. Таким образом,, зная фактическую защемленность стержней, выраженную какой-либо коли чественной характеристикой, можно .судить и о качестве изготовления конструкции и о ее фактической несущей способности.
Цель изобретения - повышение точ- ности измерения защемленности.
На фиг.1 изображена схема, иллюстрирующая принцип определения защемленности; на фиг.2 - схема устройства; на фиг.З - эквивалентная элек- трическая схема устройства, поясняющая его работу.
Еа фиг. изображена кривая 1 собственных поперечных колебаний основного тона стержня, имеющего по конца упругоповоротные защем ления. Она подобна кривой потери устойчивости такого стержня при осевом нагружении, Здесь же для сравнения приведена кри вая 2 поперечных колебаний стержня шарнирно опертого по концам, т.е. пр нулевом уровне защемленности.
Амплитуда колебаний стержня Y отсчитывается от его недеформированной оси X с началом отсчета О в середине вибропролета стержня f. Положение концов 3 вибропролета стержня ± f/2 определяется условием Yg . Расстояние между точками 4 перегиба изогнутой оси стержня, где ее кривизна обращается в нуль, именуется свободной или расчетнрй длиной стержня i.
Амплитуда колебаний в среднем сечении стержня Yj . В сечениях -а и -а - амплитуды колебаний соответственно Y Кривая 2 колебаний стержня при отсутствии защемлений по кoнцa описывается уравнением
уО V
-|- .
i а
л
v v° Ua ° Y
%ji- 2 cos -t§-. (1)
С сечениями 0,+ a,- a связаны датчики 5 - 7, преобразующие амплитуду колебаний з пропорциональный электрический сигнал ЭДС. Коэффициенты преобразования периферийных датчиков k равны между собой, но могут отличаться от коэффициента преобразования среднего датчика k. . При этом
F k V F kY V o- o Q -oi -m Q Ua
(2)
Первичные электрические сигналы датчиков Ед, Е,д , E.q преобразуются преобразователем 8 в единый выходной сигнал d, линейно связанный с величиной А:. d oiA +/i,
где
- (Y.-Y.J/X.
(3)
..
,.
Электрическая схема устройства (фиг.2) представляет собой измерительную цепь последовательно соединенных элементов, заземленную по концам.
Цепь условно расчленяется на два участка I и II, сопрягающихся в узле 9. Участок I содержит постоянный резистор 10, имеющий сопротивление R и датчик 5 с внутренним сопротивлением Гд, В1 1рабатьшагощий ЭДС Е,. Участок II содержит датчики 6 и 7 с внутренним сопротивлением г , г , вырабатывающие ЭДС и соответственно 5 а также регулировочный резистор 11 с подвижным контактом (не показан) с текуно сопротивлением R. Величина этого сопротивления отсчитывается по линейной шкале 12, причем выполняется соотношение
аК Rj (d - d) aAd, (4) где - цена деления. Ом;
соответствуюR, величины R и d,
щие нулевому уровню защемлен- нoctи
Узел 9 сопряжения участков I и И измерительной цепи снабжен нуль-индикатором потенциала 13 и связан с подвижным контактом регулировочного резистора 11 обратной связью 14, который регулирует положение подвижного контакта таким образом, чтобы нуль- индикатор оставался в равновесии.
Введение обратной связи 14 эквивалентно условию и О или введению перемычки 15, показанной пунктиром. В эквивaлeнtнoй схеме можно условно вьщелить при этом два контура с токами Зд и Iq , причем из условия фактической неразветвленности измерительной цепи DO °
Исходя из закона (2) пропорционального преобразования амплитуд колебаний в ЭДС датчиков, параметр за- щемленности стержня А преобразуется в отношение ЭДС В следующим образом:
где
ot 9
а ч -f
Таким образом, реализуется первый этап - преобразование сигналов датчиков в единый выходной сигнал d, линейно связанный с параметром кривой колебаний А. Далее второй этап - осуществление этого преобразования на дпаркирно закрепленном стержне с нулевой защемленн остью. При этом d d, Л А , что при подстановке в равенство
(6)
дает
Ь
qAo
(7)
и, соответственно, устанавливается зависимость
аБ - -5
о
9А
Третий, заключительный этап - получение -характеристики уровленности стержня h А - А
Устройство осуществляет форму связи характеристики ности с выходным сигналом
.5
R
(d d°).
cos
0
5
0
5
0
в примере вьтолнения устройства характеристика защемленности измеряется с целью определения продольного усилия, действующего в стержне. В качестве датчиков применены электродинамические преобразователи, вырабатывающие ЭДС, пропорциональную амплитуде и частоте колебаний Е kfV, причем частота лежит в интервале 20 - 55 Гц.
Поскольку все три контролируемые сечения стержня; (О, +d, -d) колеблются с одной частотой и синфазно, преобразование характеристики А в отношение ЭДС В сохраняет вид равенства (5). Внутреннее сопротивление всех датчиков г 500 Ом, отношение коэффициентов преобразования q - 1, причем условие k выполнено путем подбора датчиков с погрешностью не более 0,1%. Датчики располагаются в четвертях пролета стержня ( а 2/4), следовательно базовое знача - -1--,,ш.
ние А 2 C0S
35
ой е, 40
45
50
55
В качестве регулировочного резистора 11 использован прецизионный проволочный потенциометр, обладающий погрешностью линейного преобразования сопротивление - угол не более 0,3%. Он снабжен круговой отсчетной шкалой 12 с ценой деления 55 см/ /дел. Полное сопротивление переменного резистора в базовом состоянии R 45,1 кОм. Соответственно Rg R + 2г 46.1 кОм.
Согласно уравнению (7), вычислено и подобрано сопротивление резистора кОм. Ему соответствует R г 32 кОм. В качестве постоянных сопротивлений в измерительной цепи использованы известные резисторы.
В качестве нуль-индикатора использован аналого-цифровой преобразователь с четырехразрядной индикацией уровня потенциала узла 9. Обратная связь осуществляется оператором, коRO 32,5
: Р -
торый подбирает положение движка потенциометра из условия минимума показаний нуль-индикатора.
Механическая связь отсчетной шкалы с подвижным контактом потенциометра выполнена регулируемой так, что в базовом состоянии может быть установлен нулевой отсчет по шкале d 0. Благодаря этому определение характеристики уровня защемленности стержня упрощается:
(2 cos -|5)
1,414
55
-|о d
0
d 0,0169. (10)
,46100
Как видно из уравнений (9) и (10), коэффициент преобразования выходного сигнала d в искомую характеристику h совершенно не зависит от коэффициентов преобразования датчиков k и их отношения q. Кроме того, отсутствуют погрешности-, связанные с операциями усиления и регистрации сигнала, а также с расшифровкой осциллограмм. В итоге погрешность измерения защемленности уменьшается в десятки раз.
10
fS
,
20
25
Формула изобретени Устройство для измерения защемпен- ности стержня в конструкции, включающее датчики амплитуды колебаний, установленные в центре и на концах стержня, отличающееся тем, что, с целью повьшения точности измерения., оно снабжено постоянным резистором,, регулировочным резистором с устройством отсчета его сопротивления , нуль-индикатором потенциала с обратной связью, причем один вывод датчика, установленного в центре стержня, заземлен, а другой вывод через последовательно соединенные между собой постоянный резистор, регулиро- воч.ньшс резистор и один из датчиков, установленный на одном конце стержня, подключен к одному из выводов датчика, установленного на другом конце стержня, другой вывод которого заземлен, а подвижный контакт регулировочного резистора соединен обратной связью с нуль-индикатором потенциала, подключенным к общей точке соединения выводов постоянного и регулировочного резистора.
..
.,j3
ffi 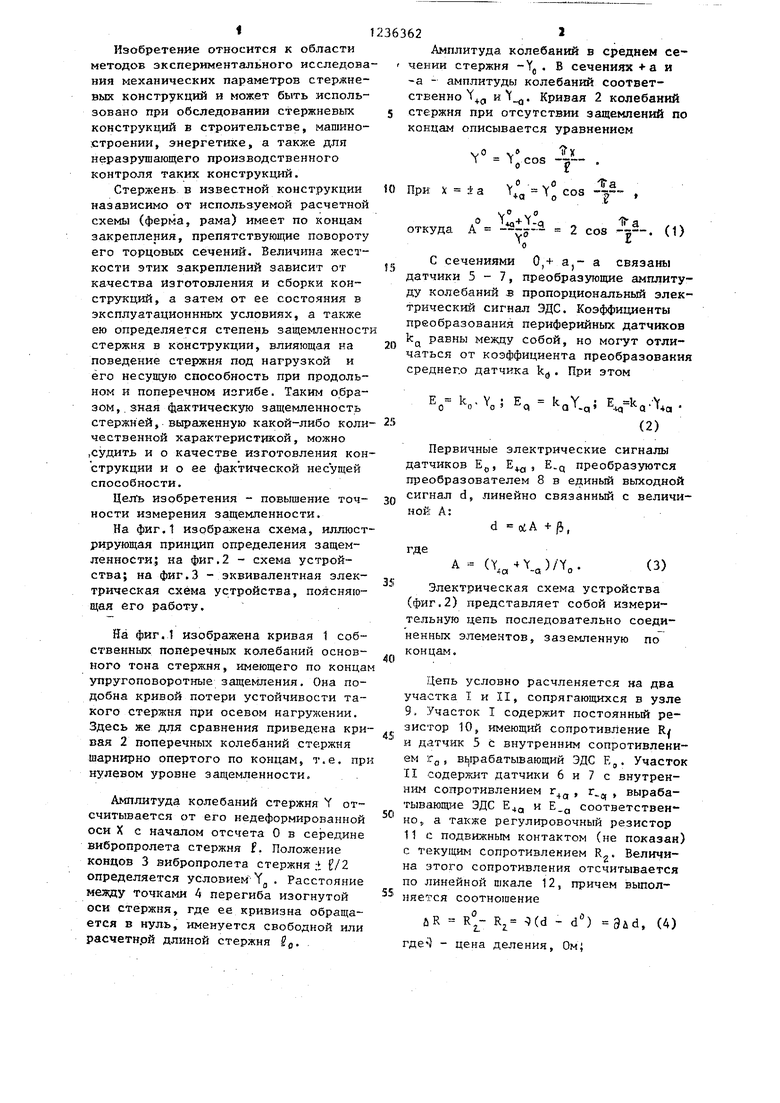
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциально-трансформаторный датчик линейных перемещений | 1981 |
|
SU1029000A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2131591C1 |
| Способ косвенного измерения при помощи дифференциального датчика и устройство для его реализации | 2018 |
|
RU2675405C1 |
| ГЕНЕРАТОР АВТОКОЛЕБАНИЙ ПРОКОФЬЕВА | 2011 |
|
RU2481696C9 |
| Устройство для обнаружения аномальных токов | 1979 |
|
SU892320A1 |
| Устройство для подогрева токопроводящей жилы | 1986 |
|
SU1356008A1 |
| ГРИФОВЫЙ ЭЛЕКТРОМУЗЫКАЛЬНЫЙ ИНСТРУМЕНТ, ГЕНЕРАТОР ТОНА, ОПТРОННАЯ ПЕДАЛЬ ГРОМКОСТИ | 2003 |
|
RU2249859C2 |
| АВТОГЕНЕРАТОР МАГНИТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ВИБРАЦИОННОГО ГИРОСКОПА И СПОСОБ БАЛАНСИРОВКИ АВТОГЕНЕРАТОРА | 2007 |
|
RU2359401C1 |
| Устройство для ориентирования отклонителей в скважине | 1981 |
|
SU996725A1 |
| Способ измерения магнитного поля и устройство для его осуществления /его варианты/ | 1980 |
|
SU958991A1 |

Изобретение относится к области методов экспериментального исследования механических параметров стержневых конструкций в строительстве, машиностроении, энергетике, позволяет повысить точность измерения эащем- ленности стержней, включает датчики 5, 6 и 7 амплитуды колебаний, установленные на концах стержней и в центре, постоянный резистор 10, регулировочный резистор 11, нуль-индикатор 13 потенциала с обратной связью 14. Подвижный контакт регулировочного резистора 11 соединен обратной сбя- зью с нуль-индикатором 13 потенциала, подключенным к общей точке соединения выводов постоянного 10 и регулировочного 11 резисторов. 3 ил. о «. (Л фиг. 2
.m
y)yaCOsf-.
y a -ySco$4} .
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лурье Ф.М | |||
| и др | |||
| Применение вибрационного метода при обследовании металлических конструкций | |||
| Л., 1976, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
