Изобретение относится к области измерительной техники. В измерительной технике широко используются так называемые дифференциальные датчики. Этот тип датчиков применяется для относительных измерений разнообразных величин: перемещения, толщины, диэлектрической проницаемости, магнитной проницаемости, светопропускания и других. Дифференциальный датчик обычно состоит из двух преобразователей измеряемой величины в какую-либо электрическую величину: активное либо реактивное сопротивление, магнитную связь, ток, напряжение. Преобразователи связывают друг с другом таким образом, чтобы найти разность формируемых ими электрических величин. Таким образом, при помощи дифференциального датчика измеряют разность физических величин, воздействующих на каждый из преобразователей.
Основной задачей дифференциального датчика является измерение небольшой разницы величин на фоне большого абсолютного значения каждой величины. Дифференциальный датчик также подавляет так называемые синфазные помехи, которые оказывают равное воздействие на оба преобразователя. Результаты воздействия этих помех на преобразователи взаимно вычитаются и не влияют на выходное значение, получаемое с датчика.
При описании дифференциальных датчиков, когда говорят об измеряемой величине, обычно подразумевают разность величин, измеряемых каждым из преобразователей. Дифференциальные датчики часто используются для измерения неоднородностей среды, которая характеризуется некоторым обобщенным параметром, например, средней диэлектрической проницаемостью, средней магнитной проницаемостью либо эквивалентной толщиной материала. В этом случае под измеряемой величиной подразумевают разность обобщенных параметров материала.
Для наибольшей общности рассуждений, в описании заявленного изобретения для обозначения тока либо напряжения используется слово «сигнал».
Важным фактором работоспособности дифференциального датчика является его балансировка. В идеальном случае, когда на каждый преобразователь поступает одинаковая физическая величина, выходной сигнал датчика должен быть равен нулю. В реальности, из-за различий в характеристиках преобразователей, выходной сигнал нулю не равняется. Это явление называется разбалансировкой. Для компенсации разбалансировки в дифференциальных датчиках и их схемах включения предусматривают специальные регулировки, которые позволяют создать противоположно направленный искусственный дисбаланс, полностью компенсирующий различие преобразователей датчика.
В наиболее часто встречающемся типе дифференциального датчика разность электрических величин находят за счет непосредственного вычитания токов, либо напряжений в электрической цепи, содержащей преобразователи. Для этого может использоваться последовательное, параллельное или мостовое включение преобразователей. Известен и другой способ связывания преобразователей. В индукционных датчиках, где измеряемая величина влияет на связь между входной и выходной катушками, часто объединяют выходные катушки обоих преобразователей в одну общую катушку. В таком датчике происходит непосредственное вычитание магнитных потоков первого и второго преобразователя, когда они проходят через общую выходную катушку. Иногда, выходные сигналы преобразователей до вычитания дополнительно преобразуют во вторичные величины, такие как частота, длительность или цифровой код, а вычитание производят при помощи решающих схем, обрабатывающих эти вторичные величины.
Как показывает опыт, датчики со вторичным преобразованием вносят дополнительные погрешности, как за счет шумов и погрешностей вторичных преобразователей, так и за счет ограниченного динамического диапазона вторичных преобразователей. При недостаточном динамическом диапазоне, в условиях синфазных помех, вторичный преобразователь может увеличить свою погрешность из-за нелинейности, вплоть до полной потери работоспособности. В датчиках с непосредственным вычитанием, процесс вычитания происходит в высоколинейной, малошумящей пассивной среде, такой как электрический проводник, магнитная цепь или даже пустое пространство. Из-за этого, в тех случаях, когда дифференциальным датчиком необходимо измерять очень малые величины на фоне заметных помех, предпочтение отдается датчикам с непосредственным вычитанием.
Преобразователи дифференциального датчика требуют подачи электрической энергии, которая после преобразования и вычитания формирует выходной сигнал. Обычно говорят об энергии возбуждения, в форме возбуждающего напряжения, которое может быть переменными или постоянными. Для многих видов преобразователей, например, емкостных или индуктивных, в силу используемого ими физического принципа, возможно возбуждение только переменным напряжением. К датчикам, использующим такие преобразователи, например, относятся дифференциальные трансформаторы, применяемые для измерения перемещений. Другие виды преобразователей, такие, как резистивные, могут возбуждаться и постоянным, и переменным напряжением. Таким образом, возбуждение переменным напряжением очень часто используется в измерительной технике. В дальнейшем мы будем говорить только о датчиках, возбуждаемых переменным напряжением.
Во многих случаях, применение относительно высоких частот возбуждения (от 1 МГц и выше) является желательным, а иногда, и неизбежным. Это часто происходит, когда с помощью датчика требуется обнаруживать небольшие различия электрической или магнитной проницаемости, либо при необходимости минимизации размеров датчика, либо из-за высоких требований к быстродействию датчика.
Выходной сигнал дифференциального датчика совпадает по частоте с возбуждающим напряжением. Амплитуда выходного сигнала обычно связана с измеряемой величиной монотонной зависимостью, а его фаза указывает на знак результата вычитания. При изменении знака измеряемой величины фаза выходного сигнала изменяется на 180 градусов. Если дифференциальный датчик не предназначен для измерения знакопеременных величин, то можно ограничиться измерением одной амплитуды. Для получения результата измерений датчиком знакопеременной величины, необходимо измерить и амплитуду, и фазу сигнала.
Чаще всего, для измерений применяют амплитудные детекторы или же синхронные (фазовые) детекторы, синхронизированные с возбуждающим напряжением. Задача измерения малых выходных сигналов дифференциального датчика сопряжена с рядом сложностей. Выходной сигнал дифференциального датчика содержит шумы и помехи, некоррелированные с возбуждающим напряжением. Некоррелированным мы будем называть сигнал, в спектре которого нет частоты возбуждения и ее гармоник. Кроме того, выходной сигнал содержит наводки с частотой возбуждения, фаза которых существенно отличается от фазы полезного сигнала. И, наконец, сам полезный сигнал сдвинут по фазе на некоторую величину относительно возбуждающего напряжения, и этот эффект тем более заметен, чем выше частота возбуждения.
Амплитудный детектор является наиболее простым техническим решением. К его недостаткам можно отнести то, что он не способен отделить шумы и помехи любого рода от малого полезного сигнала. Еще одним недостатком, характерным для простых схем амплитудного детектора, является наличие порога пропускания сигнала, ниже которого полезный сигнал практически не дает отклика. Достоинством амплитудного детектора можно назвать его нечувствительность к сдвигу фазы полезного сигнала.
Синхронный детектор позволяет подавить большинство некоррелированных помех, поскольку они оказываются вне его полосы пропускания. Однако, он чувствителен к коррелированным помехам и к сдвигу фазы полезного сигнала. Для борьбы с этими явлениями приходится использовать сдвоенный синхронный детектор, работающий по квадратурной схеме. Квадратурный синхронный детектор имеет два выхода, один из которых соответствует фазе возбуждающего напряжения, а другой соответствует фазе напряжения, ортогонального возбуждающему. Измерения при помощи квадратурного детектора предполагают усложненное устройство схемы измерения и, обычно, требуют дополнительной обработки значений на двух выходах квадратурного детектора для их приведения к одному выходному значению. Для борьбы с помехами, имеющими в своем спектре гармоники напряжения возбуждения, нужно, чтобы каждый из синхронных детекторов был бы построен по схеме истинного аналогового умножителя. Такие детекторы, в особенности, обладающие большим динамическим диапазоном, необходимым для задач измерения, сложны и дороги.
Примером использования квадратурного детектора является решение, раскрытое в патенте США US 8026716 (заявка №2009243603, опубл. 01.10.2009, МПК G01N 27/72). В этом документе описывается дифференциальный индуктивный датчик, предназначенный для измерения количества ферромагнитных частиц, образующихся в ходе проведения биохимического анализа. Ферромагнитные частицы создают неравномерность магнитной проницаемости аналитического субстрата, и величина этой неравномерности служит показателем количества определенного биологически активного вещества в субстрате. Дифференциальный датчик представляет собой полномостовую схему из четырех планарных катушек индуктивности, размещенных непосредственно на субстрате. Одна из катушек находится в зоне субстрата, где в ходе реакции осаждаются магнитные частицы. Индуктивность этой катушки изменяется в зависимости от количества частиц. Мост возбуждается переменным напряжением высокой частоты, находящейся в диапазоне от единиц до десятков мегагерц. Выходной сигнал моста подается на квадратурный детектор, выходные сигналы которого фильтруются и преобразуются в цифровую форму для дальнейшей обработки. Балансировка моста обеспечивается за счет специального генератора, формирующего компенсирующий ток, подаваемый в среднюю точку моста. Компенсирующий ток имеет возможность подстройки как по амплитуде, так и по фазе.
Описанное решение обладает очень хорошей чувствительностью к малым неоднородностям магнитной проницаемости, что достигается за счет сложности измерительной схемы. Измерительная схема включает в себя три цифровых синтезатора переменного напряжения (DDS), работающих на одной частоте. Первый синтезатор создает напряжение возбуждения; второй формирует напряжение, ортогональное напряжению возбуждения, необходимое для работы квадратурного детектора; третий синтезатор генерирует напряжение для формирования компенсирующего тока.
Необходимость применения компенсирующего тока произвольной фазы раскрывает существенную проблему, которая почти всегда возникает при работе дифференциального датчика на высокой частоте. Паразитные эффекты приводят к фазовым различиям напряжений в плечах моста. В результате, в выходном сигнале появляется компонента, ортогональная полезному сигналу. Обычные методы балансировки ориентированы на то, чтобы в исходном состоянии датчика вывести в ноль уровень полезного сигнала. Однако они оказывают малое влияние на ортогональную компоненту. Поэтому, в данном решении, для балансировки с устранением ортогональной компоненты применяется весьма сложная схема цифрового синтеза частоты, состоящая из дорогостоящих элементов.
В патенте США US 6995021 (заявка №2004171172, опубл. 02.09.2004, МПК МПК G01N 33/558) также описан дифференциальный индуктивный датчик, используемый для измерения количества ферромагнитных частиц в аналитическом субстрате. В отличие от патента US 8026716, в этом решении применяется амплитудный детектор, выполненный при помощи аналого-цифрового преобразователя и дополнительной вычислительной обработки. Частота возбуждения мала и составляет 10 кГц, что обуславливает большие габариты датчика и невысокую чувствительность. Для борьбы с некоррелированными помехами используется полосовая фильтрация полезного сигнала и дополнительная цифровая фильтрация отсчетов аналого-цифрового преобразователя. В силу малой частоты возбуждения и небольшой чувствительности проблема ортогональной компоненты не приносит заметных сложностей. Однако, в подобном устройстве принципиально невозможно обеспечить подавления ортогональной компоненты из-за отсутствия информации о фазовом соотношении возбуждающего и выходного напряжений. Важно также отметить, что наводки, ортогональные по фазе к полезному сигналу, могут сделать амплитудный детектор практически нечувствительным к малым величинам полезного сигнала. Это происходит из-за того, что при векторном суммировании модуль суммы малого полезного сигнала и значительной ортогональной компоненты, измеряемый детектором, будет практически равен модулю ортогональной компоненты.
Технической задачей, решаемой в заявленной группе изобретений, является обеспечение обработки сигнала, полученного от дифференциального датчика с обеспечением высокой точности измерения изменений малых величин с помощью устройства на основе достаточно простой схемы амплитудного детектора. Для реализации этой задачи необходимо добиться, чтобы при использовании амплитудного детектора была бы реализована низкая чувствительность к помехам, некоррелированным с частотой возбуждения, а также к помехам с частотой возбуждения, ортогональным к полезному сигналу. Кроме того, требуется обеспечить отсутствие порога чувствительности, характерного для простой схемы амплитудного детектора. Сдвиг фазы полезного сигнала относительно возбуждающего напряжения не должен оказывать влияния на характеристики датчика.
В рамках задач, решаемых изобретением, не входит измерение комплексных величин, таких, как полная диэлектрическая проницаемость или полная магнитная проницаемость материалов на очень высоких частотах. Когда измеряемая величина имеет существенную мнимую составляющую, то приращение выходного сигнала преобразователя, возникающее за счет измеряемой величины, направлено под заметным углом к общему выходному сигналу преобразователя. Очевидно, что для подобных измерений необходимо использовать фазочувствительные способы, такие, как квадратурное синхронное детектирование.
В последующем описании предполагается, что компонента приращения выходного сигнала преобразователя, возникающая за счет измеряемой величины и направленная ортогонально по отношению к общему выходному сигналу преобразователя, не существенна для проводимых измерений. Иными словами, фаза приращения выходного сигнала преобразователя, возникающего за счет измеряемой величины, близка к фазе выходного сигнала преобразователя. В качестве примера можно привести измерение диэлектрической либо магнитной проницаемости на таких частотах, на которых можно пренебречь поворотом фазы наведенных диполей в материале по отношению к возбуждающему полю.
Решение, описанное в патенте США US 8026716, выбрано в качестве ближайшего аналога.
Техническим результатом заявленной группы изобретений является обеспечение точности и чувствительности измерений, выполняемых дифференциальным датчиком, при упрощении конструкции устройства, реализующего обработку выходного сигнала дифференциального датчика, возбуждаемого переменным напряжением.
Этот результат достигается за счет того, что в способе косвенного измерения при помощи дифференциального датчика, возбуждаемого переменным напряжением, в котором до проведения измерений обеспечивают заданный дисбаланс дифференциального датчика, существенно превышающий рабочий диапазон изменения измеряемой величины, выполняют требуемое измерение с получением выходного сигнала датчика, выходной сигнал датчика подвергают выпрямлению, из выпрямленного сигнала вычитают заранее заданное постоянное значение, величину сигнала, полученного после вычитания, измеряют и используют для нахождения значения измеряемой величины, причем дисбаланс датчика и вычитаемое заранее заданное постоянное значение выбирают, исходя из условия, чтобы между измеряемой величиной, находящейся в рабочем диапазоне, и величиной сигнала, полученного после вычитания, обеспечивалась монотонная зависимость.
Введение дисбаланса, существенно превышающего рабочий диапазон изменения измеряемой величины, до проведения измерений, приводит к тому, что на выходе дифференциального датчика (далее по тексту будет использован преимущественно термин «датчик», подразумевая при этом дифференциальный датчик) постоянно имеется переменное напряжение, амплитуда которого велика и, в относительных величинах, мало меняется при изменении измеряемой величины. Из-за этого выпрямитель работает с почти постоянным углом отсечки, который существенно близок к 180 градусам, и практически не меняется при изменении измеряемой величины либо при воздействии помех. Полезный сигнал, обусловленный измеряемой величиной, имеет фазу, близкую к фазе сигнала на выходе каждого из преобразователей, о чем уже говорилось выше. Соответственно, фаза полезного сигнала близка к фазе разностного сигнала на выходе датчика, возникшего в результате введения дисбаланса. Моменты открытия и закрытия выпрямителя практически совпадают с моментами пересечения нулевого уровня напряжением на выходе датчика. Открытие и закрытие выпрямителя синхронизировано с возбуждающим напряжением, происходит синфазно с сигналом разбалансировки и практически совпадает по фазе с полезным сигналом.
Таким образом, обычный выпрямитель в описанном режиме всегда работает как синхронный детектор (синхронный выпрямитель), опорное напряжение которого совпадает по фазе с полезным сигналом. Далее, для простоты мы будем называть эту фазу фазой выпрямления. Такая работа обеспечивает подавление некоррелированных помех и шумов, характерное для синхронного детектирования. Различие в фазе возбуждающего и полезного сигнала не оказывает влияния на выходной сигнал выпрямителя.
Когда к сигналу на входе выпрямителя примешивается ортогональная компонента помехи, существенно меньшая сигнала, вызванного дисбалансом, то она в силу своей малости практически не влияет на фазу выпрямления и подавляется синхронным детектором. Как известно из теории синхронного детектирования, сигнал, ортогональный опорному, не влияет на выходное напряжение детектора. По этой же причине ортогональная компонента помехи не может подавить малый полезный сигнал, в отличие от того, как это происходит при обычном амплитудном детектировании.
Сколь бы малым не был полезный сигнал, он всегда оказывает линейное влияние на выходной сигнал выпрямителя, поскольку, вне зависимости от уровня полезного сигнала, выпрямитель всегда открывается под действием сигнала, вызванного дисбалансом, и пропускает полезный сигнал на выход.
В сравнении с ближайшим аналогом, для реализации заявленного способа требуется значительно более простое устройство, в котором отсутствуют многочисленные цифровые синтезаторы частот, вместо квадратурного детектора применяется простой выпрямитель, а цифровая обработка сигнала не обязательна. В то же время, при заявленном способе обеспечивается высокая точность измерений за счет линейности преобразования сигнала датчика в выходной сигнал выпрямителя. Подавление некоррелированных и ортогональных помех на фоне полезного сигнала датчика позволяет получить более высокую чувствительность.
В некоторых реализациях способа измерений после выпрямления и до измерения значения сигнала может дополнительно производиться его фильтрация. Сигнал, полученный из выходного сигнала выпрямителя после вычитания постоянного уровня, является импульсным. Он имеет частоту, равную частоте возбуждения (в случае однополупериодного выпрямителя) или удвоенной частоте возбуждения (для двухполупериодного выпрямителя). Без дополнительных мер фильтрации его можно измерить, например, вольтметром среднего значения, который, в ходе измерения, обеспечивает усреднение входного сигнала выпрямителя. Либо же, к сигналу после вычитания постоянного уровня может применяться фильтр низких частот, подавляющий частоту возбуждения и более высокие частоты. Это позволяет проводить измерения без необходимости усреднения в измерительном приборе.
Если требуется получить высокое быстродействие датчика, импульсный сигнал после вычитания постоянного уровня может быть подвергнут интегрированию в течение заданного периода времени. К концу периода интегрирования будет получено усредненное значение сигнала, пригодное для моментального измерения, но оно не будет иметь связи с предысторией измерений в предыдущих циклах интегрирования.
Описанное здесь применение вольтметра среднего значения, фильтра низких частот либо интегратора решает задачу усреднения импульсного сигнала, полученного после вычитания постоянного уровня, для цели измерения величины этого сигнала.
Также, фильтрацию сигнала после выпрямления можно проводить фильтром низких частот до вычитания постоянного уровня, чтобы подавить в этом сигнале частоту возбуждения и более высокие частоты. Вычитание постоянного уровня, в этом случае, будет происходить без формирования высокочастотных импульсов. За счет отсутствия высокочастотной компоненты в сигнале можно обеспечить более точное вычитание, либо использовать для вычитания более простую схему.
Намеренное обеспечение дисбаланса датчика может выполняться теми же известными способами, которые используются для устранения естественного дисбаланса дифференциальных датчиков. Например, амплитуда напряжения возбуждения, подаваемого на один из преобразователей, может быть изменена с сохранением фазы без изменения напряжения возбуждения на втором преобразователе. Это приведет к изменению разностного сигнала. Либо же, может быть немного изменен конструктивный параметр одного из преобразователей, например, количество витков в катушке индуктивности одного из преобразователей индуктивного дифференциального датчика.
Для работоспособности заявленного способа важно, чтобы между измеряемой величиной, находящейся в рабочем диапазоне, и измеренным значением сигнала имелась бы монотонная зависимость. В противном случае, косвенное измерение становится невозможным, так как теряется функциональная связь между измеряемой величиной и измеренным значением сигнала. Эта ситуация возникает в случае выхода в насыщение одного из элементов устройства. Чтобы избежать насыщения, требуется выбрать дисбаланс датчика и вычитаемый уровень таким образом, чтобы они за счет взаимной компенсации задавали бы токи и напряжения в элементах устройства в допустимых пределах.
В некоторых реализациях, заявленный способ предусматривает проведение калибровки по исходному состоянию для приведения значения измеренного сигнала к исходному значению. С этой целью, переводят датчик в исходное состояние, соответствующее исходному значению измеряемой величины. После этого выбирают дисбаланс датчика и вычитаемый постоянный уровень таким образом, чтобы получаемый при калибровке результат измерения сигнала был бы равен некоторому исходному значению. Такое действие эквивалентно процедуре балансировки обычного дифференциального датчика, которую иногда называют установкой нуля.
В различных реализациях заявленного способа, калибровка по исходному состоянию может производиться как изменением дисбаланса датчика, так и изменением вычитаемого уровня. Выбор того или иного варианта определяется его удобством для конкретной реализации. Так, например, если дисбаланс в датчике обеспечивается за счет разного количества витков в катушках индуктивности преобразователей, то легче изменить уровень вычитаемого сигнала, чем количество витков. Если же дисбаланс в датчике обеспечивается за счет подачи различных напряжений возбуждения на преобразователи, то управление напряжением возбуждения может оказаться более удобным, чем изменение уровня вычитаемого сигнала.
В некоторых реализациях заявленного способа может быть использован выпрямитель с передаточной характеристикой, близкой к квадратичной. Выпрямленный сигнал такого выпрямителя приближенно пропорционален квадрату входного сигнала. Преимущество квадратичной характеристики состоит в глубоком подавлении высших гармоник сигнала возбуждения. Рассмотрим эту особенность более подробно. Пусть на вход выпрямителя подается гармонический сигнал дисбаланса  , смешанный с полезным сигналом
, смешанный с полезным сигналом  и помехой Urm: Urin=Urd+Urs+Urm где
и помехой Urm: Urin=Urd+Urs+Urm где 
Однополупериодный выпрямитель формирует квадратичный выходной сигнал только на временных отрезках продолжительностью  , что соответствует полупериоду колебаний. Двухполупериодный выпрямитель формирует квадратичный выходной сигнал на протяжении всего времени измерения.
, что соответствует полупериоду колебаний. Двухполупериодный выпрямитель формирует квадратичный выходной сигнал на протяжении всего времени измерения.
Для определенности, но без нарушения общности рассмотрения, будем считать, что выходным сигналом выпрямителя является ток. Выходной сигнал выпрямителя, с использованием формулы квадрата суммы, имеет вид: 
где А и В - постоянные коэффициенты, а I0 - начальный ток.
Пренебрежимо малые члены, пропорциональные  и
и  , в этом представлении отброшены. Для оценки результата усреднения необходимо использовать свойства произведения различных гармоник сигнала, известные специалисту в области радиотехники. Первый член
, в этом представлении отброшены. Для оценки результата усреднения необходимо использовать свойства произведения различных гармоник сигнала, известные специалисту в области радиотехники. Первый член  , после усреднения, дает постоянную величину, не зависящую ни от полезного сигнала, ни сигнала помехи. Второй член BUrsUrd, после усреднения, даст ненулевое значение, соответствующее отклику на измеряемую величину. Если Urm является нечетной гармоникой напряжения возбуждения, то третий член BUrmUrd даст нулевое значение. Если Urm является четной гармоникой, то ее вклад в случае двухполупериодного выпрямления также будет нулевым. В случае однополупериодного выпрямления вклад четной гармоники будет зависеть от сдвига ее фазы, изменяясь от нуля до наибольшего значения при сдвиге 90 градусов.
, после усреднения, дает постоянную величину, не зависящую ни от полезного сигнала, ни сигнала помехи. Второй член BUrsUrd, после усреднения, даст ненулевое значение, соответствующее отклику на измеряемую величину. Если Urm является нечетной гармоникой напряжения возбуждения, то третий член BUrmUrd даст нулевое значение. Если Urm является четной гармоникой, то ее вклад в случае двухполупериодного выпрямления также будет нулевым. В случае однополупериодного выпрямления вклад четной гармоники будет зависеть от сдвига ее фазы, изменяясь от нуля до наибольшего значения при сдвиге 90 градусов.
Таким образом, использование выпрямителя с характеристикой, близкой к квадратичной, позволяет существенно уменьшить влияние помех и наводок от гармоник второго и более высокого порядков, возникающих, как правило, из-за нелинейностей в элементах устройства. Чаще всего, высокочастотная наводка с частотой возбуждения имеет симметричную форму сигнала, то есть в ней присутствуют только нечетные гармоники. В этом случае, с точки зрения подавления гармонических наводок, более экономично использовать однополупериодный выпрямитель. Если же наводка имеет несимметричную форму сигнала, то в ее спектре имеются четные гармоники, и оправдано применение двухполупериодного выпрямителя.
Выше были описаны различные аспекты реализации способа, которые могут включать в себя: использование выпрямителя с передаточной характеристикой, близкой к квадратичной; проведение калибровки с изменением дисбаланса датчика, либо же с изменением вычитаемой величины; выполнение усреднения сигнала после выпрямления либо же после вычитания постоянной величины. Эти аспекты могут применяться в конкретном воплощении способа независимо друг от друга в различных сочетаниях.
Заявленный технический результат в устройстве для косвенного измерения обеспечивается за счет того, что устройство для косвенного измерения содержит дифференциальный датчик, возбуждаемый переменным напряжением, и имеющий дисбаланс, существенно превышающий рабочий диапазон изменения измеряемой величины, выпрямитель для выпрямления выходного сигнала дифференциального датчика, схему вычитания для вычитания постоянного значения из выходного сигнала выпрямителя, и измерительное устройство для измерения величины сигнала на выходе схемы вычитания.
Наличие дисбаланса датчика в устройстве, который существенно превышает рабочий диапазон изменения измеряемой величины, приводит к тому, что на выходе дифференциального датчика постоянно имеется переменное напряжение, амплитуда которого велика и, в относительных величинах, мало меняется при изменении измеряемой величины. Из-за этого выпрямитель работает с почти постоянным углом отсечки, который существенно близок к 180 градусам, и практически не меняется при изменении измеряемой величины либо при воздействии помех. Полезный сигнал, обусловленный измеряемой величиной, имеет фазу, близкую к фазе сигнала на выходе каждого из преобразователей, о чем уже говорилось выше. Соответственно, фаза полезного сигнала близка к фазе разностного сигнала на выходе датчика, возникшего в результате введения дисбаланса. Моменты открытия и закрытия выпрямителя практически совпадают с моментами пересечения нулевого уровня напряжением на выходе датчика. Открытие и закрытие выпрямителя синхронизировано с возбуждающим напряжением, происходит синфазно с сигналом разбалансировки и практически совпадает по фазе с полезным сигналом.
Как уже было разъяснено ранее, обычный выпрямитель в описанном режиме работает как синхронный детектор (синхронный выпрямитель), опорное напряжение которого совпадает по фазе с полезным сигналом. За счет этого, устройство обеспечивает высокий уровень подавления некоррелированных помех и шумов, который характерен для синхронного детектирования. Кроме того, за счет свойств синхронного детектирования в устройстве подавляется влияние помехи, ортогональной полезному сигналу датчика. Благодаря эффективному подавлению различных видов помех обеспечивается высокая чувствительность устройства.
Так как процесс выпрямления в описанном устройстве идет в режиме большого сигнала, который определяется дисбалансом датчика, то для такого процесса отсутствует пороговый эффект, который обычно проявляется при выпрямлении малого сигнала. Как известно, выпрямитель, работающий в режиме большого сигнала, обладает высокой линейностью. Поэтому, амплитуда даже очень малого полезного сигнала линейно передается на выход выпрямителя, что обеспечивает высокую точность и чувствительность всего устройства.
Как уже указывалось ранее, описанное устройство значительно проще ближайшего аналога, в котором применяется синхронное детектирование, но обеспечивает сопоставимую с ним высокую точность и чувствительность измерений. В то же время, описанное устройство значительно превосходит по точности и чувствительности другие известные устройства, в которых, как и в нем, также применяется амплитудное детектирование и которые конструктивно проще прототипа. Таким образом, описанное устройство обладает уникальным сочетанием простоты, высокой чувствительности и высокой точности, что и обеспечивает заявленный технический результат.
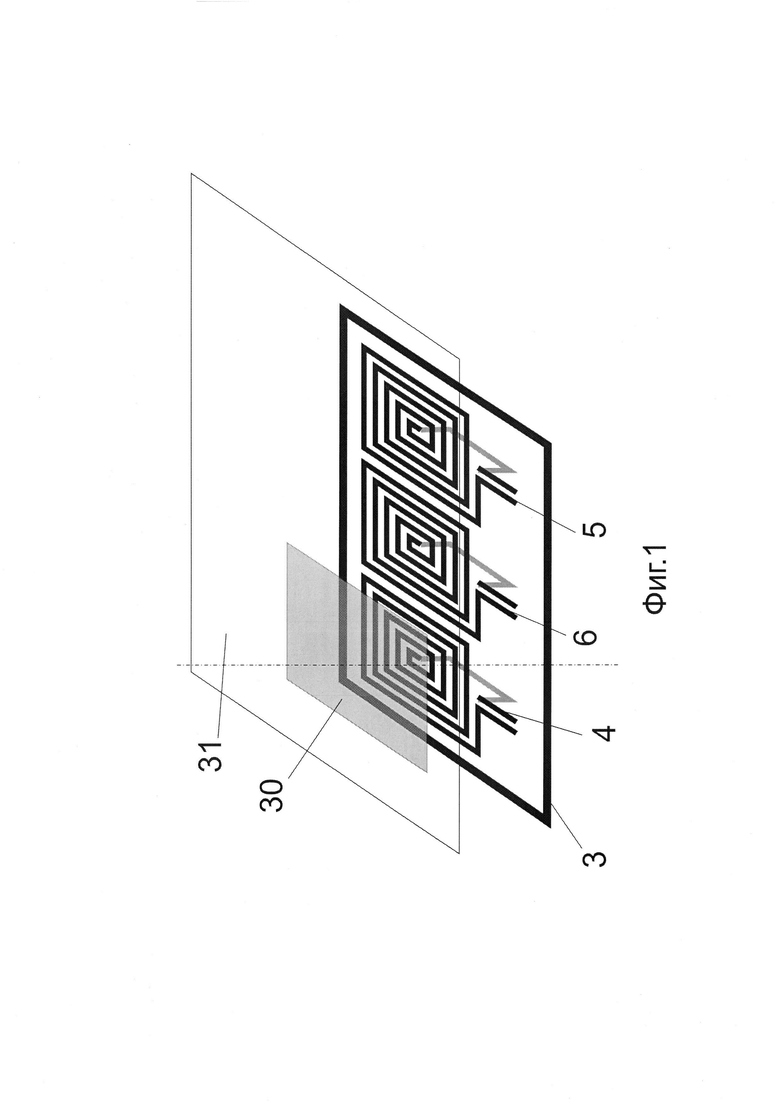
На Фиг. 1 показано устройство датчика.
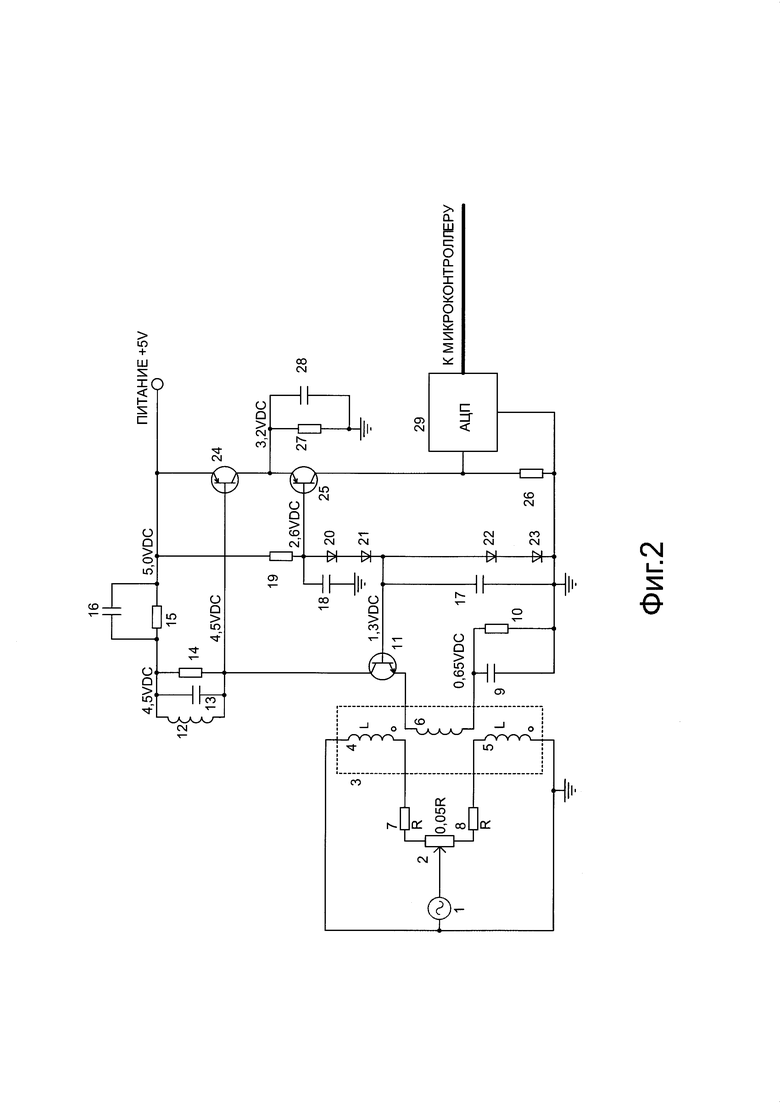
На Фиг. 2 показана схема подключения датчика, применяемая в практической реализации заявленного способа.
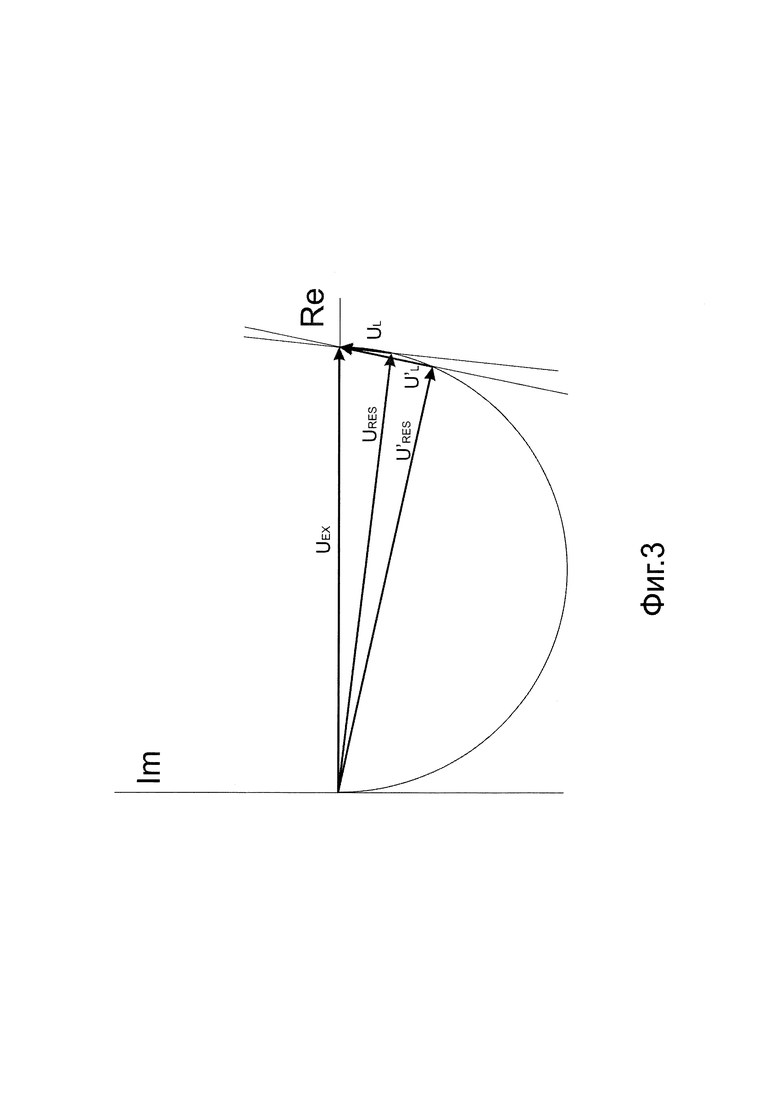
На Фиг. 3 представлена векторная диаграмма напряжений на катушках возбуждения датчика.
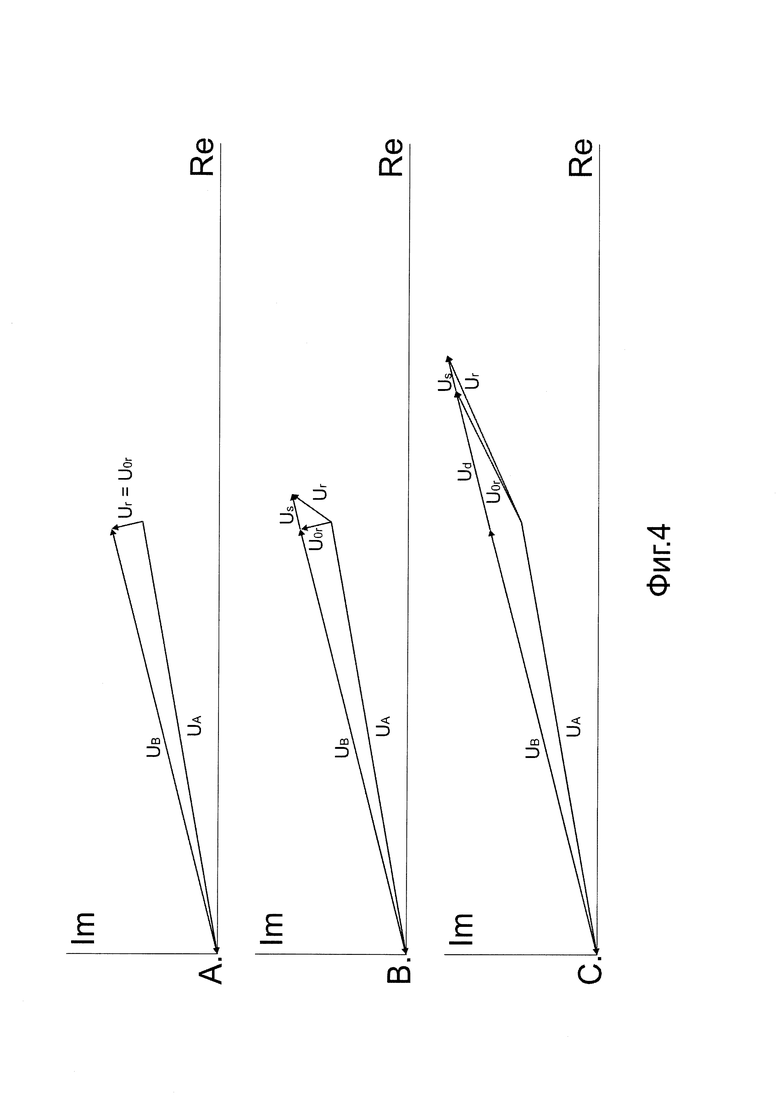
Фиг. 4А и 4В показывают векторные диаграммы ЭДС датчика в состоянии наилучшей балансировки, в отсутствии полезного сигнала и при его наличии.
На Фиг. 4С показана векторная диаграмма ЭДС датчика при наличии разбалансировки, в отсутствии полезного сигнала и при его наличии.
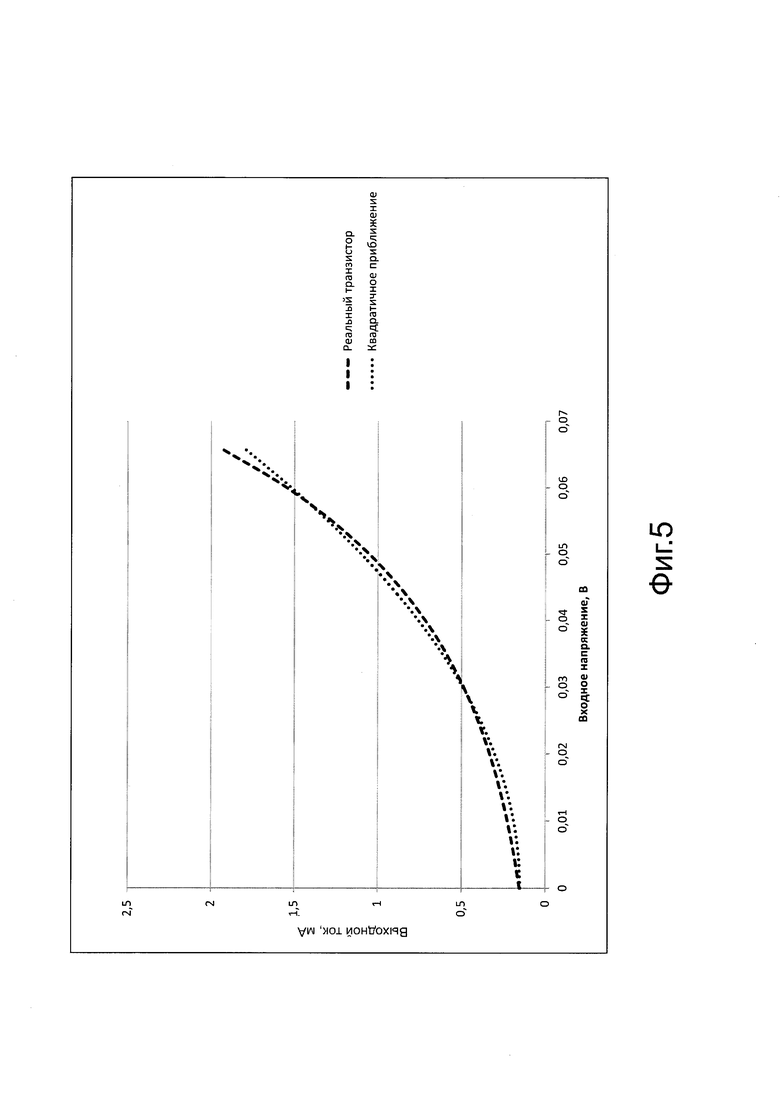
На Фиг. 5 приведен график передаточной характеристики выпрямителя, показывающий возможность использования биполярного транзистора в качестве квадратичного детектора.
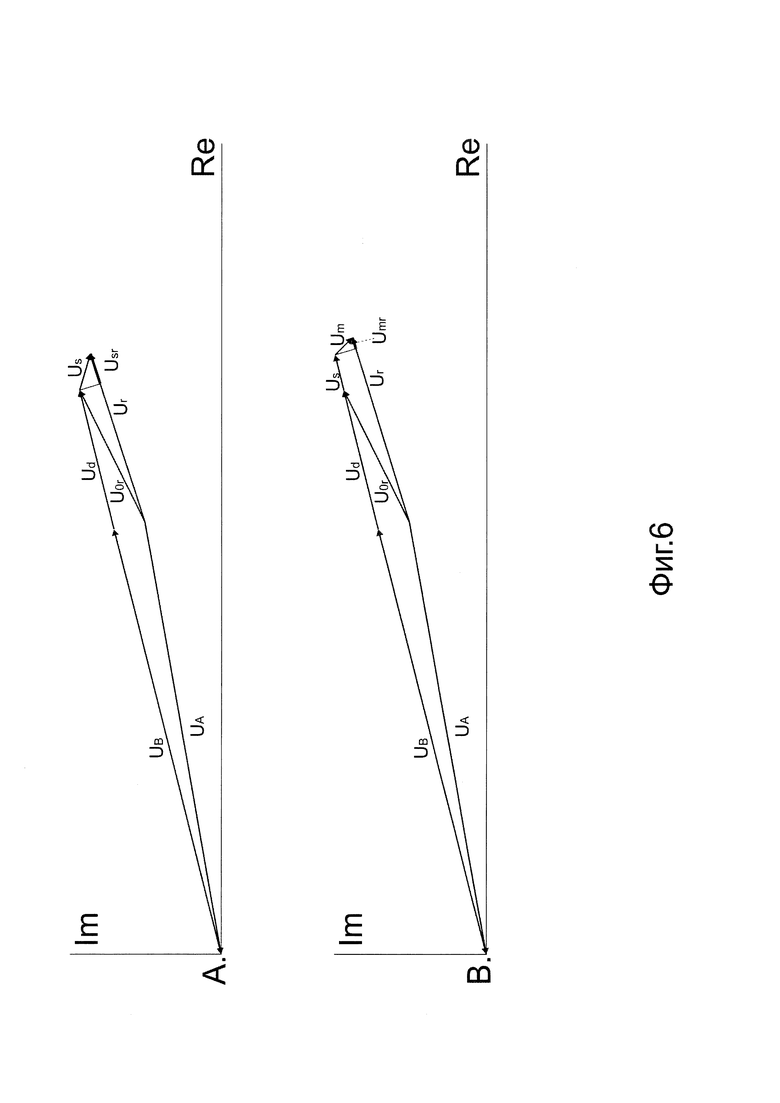
Фиг. 6А показывает векторную диаграмму ЭДС датчика в случае комплексной величины магнитной проницаемости.
На Фиг. 6В показана векторная диаграмма ЭДС датчика при наличии помехи, совпадающей по частоте с частотой возбуждения.
Индуктивный дифференциальный датчик 3, как показано на Фиг. 1, выполнен в виде трех планарных катушек 4, 5, 6 индуктивности. Он используется для измерения количества ферромагнитных частиц, располагаемых в виде компактной области 30 на листе 31. Подобное расположение магнитных частиц встречается во многих применениях. Например, на банкнотах используется специальная краска, содержащая ферромагнитные частицы и наносимая на строго определенные участки банкноты. При проведении биохимических анализов, материал с ферромагнитными свойствами осаждается в заданной зоне субстрата. Дифференциальный датчик производит измерение различия в эффективной магнитной проницаемости между областью 30 листа 31 и соседней с ней частью этого листа, где ферромагнитные частицы отсутствуют. В показанном расположении, область 31 накрывает собой катушку 4, так что силовые линии, создаваемые этой катушкой, целиком проходят через область 31.
Боковые катушки 4 и 5 датчика используются для возбуждения, а с центральной катушки 6 снимается сигнал, характеризующий неравномерность распределения магнитных частиц в материале. Конструкция датчика симметрична, причем, в отсутствии листа 30, каждая из катушек 4 и 5 связана с катушкой 6 магнитной связью одной и той же величины. Как показано на Фиг. 2, генератор 1 вырабатывает напряжение возбуждения, которое вызывает протекание переменного тока через катушки 4 и 5. Фазировка тока в катушках 4 и 5 выбрана таким образом, что магнитные поля этих катушек, пересекающие катушку 6, имеют противоположное направление. Преобразователями датчика являются пары катушек 4,6 и 5,6, а вычитание происходит непосредственно в катушке 6, общей для обоих преобразователей. Величина тока в боковых катушках определяется резисторами 2, 7 и 8. Измеряемой величиной датчика является разность эффективных магнитных проницаемостей в магнитных цепях связи боковых катушек 4 и 5 с центральной катушкой 6.
Оптимальная частота напряжения возбуждения находится в диапазоне от единиц до нескольких десятков мегагерц. Частота измерения достаточно высока, чтобы защитить процесс измерения от воздействия низкочастотных магнитных помех, которые наиболее сильно препятствуют измерениям в диапазоне примерно до 100 кГц. С другой стороны, она должна быть достаточно низкой для того, чтобы не возникали сложности из-за запаздывания реакции ферромагнетика на быстро меняющееся магнитное поле. Фаза разностного магнитного потока, возникающего в катушке 6 при внесении ферромагнитного материала в датчик, при слишком большой частоте может существенно отличаться от фазы магнитного потока в катушках возбуждения, что может вызвать сложности при измерении. При оптимальной частоте указанное различие фаз несущественно.
Частота генератора ω=2πƒ, а также соотношение индуктивностей катушек L и сопротивлений резисторов R выбираются таким образом, что ωL << R. При таком соотношении фаза тока в катушках практически совпадает с фазой напряжения возбуждения, а амплитуда тока обратно пропорциональна R. Потенциометр 2 предназначен для балансировки датчика. Перемещение подвижного контакта потенциометра 2 вносит дисбаланс в соотношение токов катушек 4 и 5. При сопротивлении потенциометра 0,05R диапазон дисбаланса токов, который можно реализовать за счет перемещения подвижного контакта, составляет ±5% от амплитуды тока через катушку.
Важно отметить, что перемещение подвижного контакта потенциометра 2 изменяет величину тока через катушки 4 и 5, но, практически не изменяет фазу тока. Эту особенность можно проиллюстрировать при помощи векторной диаграммы напряжений, показанной на Фиг. З. Эта диаграмма построена для цепочки последовательно включенных элементов: катушки 4 с индуктивностью L, резистора 7, величина которого равна R, и изменяемого сопротивления верхней (по схеме) половины потенциометра 2. Напряжение UL на катушке, и напряжение URES на сопротивлении, составленном из резистора 7 и верхней (по схеме) половины потенциометра 2, ортогональны друг другу и в сумме дают приложенное к цепочке напряжение UEX. Векторы, соответствующие этим напряжениям, формируют прямоугольный треугольник. Как указывалось выше, за счет соотношения напряжение URES очень близко к напряжению возбуждения UEX и практически совпадает с ним по фазе. Поэтому соответствующий угол треугольника мал:  . При небольшом изменении сопротивления в цепи, изменяется ток через катушку и напряжение на ней. Новые значения напряжений показаны на рисунке как U'L и U'RES. Соответствующий им треугольник построен на той же гипотенузе, но имеет другую пару катетов. Вершины двух треугольников лежат на окружности, построенной на векторе UEX как на диаметре. Угол между напряжением на резисторе и напряжением возбуждения по-прежнему мал:
. При небольшом изменении сопротивления в цепи, изменяется ток через катушку и напряжение на ней. Новые значения напряжений показаны на рисунке как U'L и U'RES. Соответствующий им треугольник построен на той же гипотенузе, но имеет другую пару катетов. Вершины двух треугольников лежат на окружности, построенной на векторе UEX как на диаметре. Угол между напряжением на резисторе и напряжением возбуждения по-прежнему мал:  . Из известного свойства суммы углов треугольника угол между напряжением на катушке и напряжением возбуждения мало меняется:
. Из известного свойства суммы углов треугольника угол между напряжением на катушке и напряжением возбуждения мало меняется:  . Соответственно, мало изменяется и фаза тока в катушке, и связанная с ней фаза магнитного потока. Необходимо отметить, что на Фиг. 3, для достижения легкой читаемости рисунка, показана достаточно большая разница между URES и U'RES, примерно равна 70%. В реальности, потенциометр 2 имеет величину сопротивления 0,05R и позволяет изменять суммарное сопротивление в цепи не более чем на 10%, что соответствует отклонению угла в пределах нескольких градусов.
. Соответственно, мало изменяется и фаза тока в катушке, и связанная с ней фаза магнитного потока. Необходимо отметить, что на Фиг. 3, для достижения легкой читаемости рисунка, показана достаточно большая разница между URES и U'RES, примерно равна 70%. В реальности, потенциометр 2 имеет величину сопротивления 0,05R и позволяет изменять суммарное сопротивление в цепи не более чем на 10%, что соответствует отклонению угла в пределах нескольких градусов.
Из сказанного становится очевидным, что указанный способ балансировки способен компенсировать естественный дисбаланс датчика, определяемый различием магнитной связи в парах катушек 4,6 и 5,6. Это различие приводит к изменению величины магнитного потока, доходящего до катушки 6, без существенного изменения фазы магнитного потока. Для его компенсации нужно изменить магнитный поток, практически не изменяя его фазу.
Вначале, рассмотрим работу сбалансированного датчика 3. Магнитный поток катушек 4 и 5, при прохождении через центральную катушку 6, взаимно вычитается. За счет перемещения подвижного контакта потенциометра 2, можно добиться балансировки, то есть почти полной нейтрализации потоков, за счет чего ЭДС катушки 6 будет практически равен 0. Если в магнитный путь одной из катушек возбуждения попадает ферромагнитный материал, это приводит к пространственному перераспределению ее магнитного потока. В результате, изменяется коэффициент связи этой катушки возбуждения и приемной катушки 6, что приводит к нарушению взаимной нейтрализации магнитных потоков и появлению ЭДС на катушке 6. Таким образом, ЭДС катушки 6 является мерой количества неравномерно распределенного магнитного материала.
На указанных частотах на работу датчика существенно влияют помехи, вызываемые паразитными связями, возникающими как в самом датчике, так и в окружающем его пространстве. Эти связи носят, главным образом, емкостной характер. Кроме того, время распространения высокочастотных сигналов по проводникам оказывает влияние на фазу токов в катушках возбуждения. При различии длины проводников, подводящих ток к катушкам 4 и 5, ЭДС наводимые каждой из этих катушек в катушке 6, будут различаться по фазе.
На Фиг. 4А показана векторная диаграмма выходного напряжения датчика 3 в состоянии наилучшей балансировки, когда лист 31 находится вне зоны чувствительности датчика. Напряжение на выходной катушке 6 обозначено Ur, причем его модуль приведен к минимально возможному значению за счет перемещения подвижного контакта потенциометра 2. Оно возникает в результате векторного сложения напряжения UA, обусловленного влиянием катушки 5, и UB, обусловленного влиянием катушки 4. Напряжения UA и UB можно, по отдельности, измерить на катушке 6, поочередно отключая подачу напряжения на катушки 4 и 5. Между напряжениями UA и UB существует небольшой угол, обусловленный паразитными связями в датчике и задержками распространения в проводниках. За счет этого угла, при балансировке невозможно добиться полного обнуления выходного напряжения Ur. Остаточное напряжение Ur в состоянии наилучшей балансировки направлено почти ортогонально к напряжениям UA и UB
На Фиг. 4В векторная диаграмма выходного напряжения датчика 3 показана в состоянии, когда область 30, располагающаяся вблизи катушки 4, содержит ферромагнитные частицы. За счет этого, к исходному напряжению UB добавляется коллинеарный ему полезный сигнал Us. Напряжение на выходной катушке 6 обозначено Ur. Дополнительно, на векторной диаграмме показано начальное напряжение U0r на выходной катушке в отсутствии листа. При внесении листа 31 с областью 30 в область чувствительности датчика, выходной сигнал датчика меняется от значения U0r к значению Ur. Как видно из векторной диаграммы, при этом меняется и угол, и модуль напряжения. Причем, если модуль полезного сигнала Us меньше, либо близок к модулю начального напряжения U0r, то Ur мало меняется по модулю из-за соотношения углов в треугольнике, образованном названными векторами. Поэтому, для проведения измерений малого полезного сигнала, амплитудный детектор оказывается малопригодным. В этом случае, необходимо применять синхронное детектирование, требующее использования устройства повышенной сложности.
Рассмотренная ситуация еще более усложняется тем, что простые амплитудные детекторы обладают большой нелинейностью при малом уровне выпрямляемого сигнала, что вносит дополнительные погрешности при работе вблизи точки наилучшей балансировки.
Работа датчика 3 в состоянии наилучшей балансировки описана здесь только для того, чтобы проиллюстрировать технический результат заявленного изобретения. В соответствии с заявленным изобретением, в настройку датчика 3, за счет перемещения подвижного контакта потенциометра 2, внесен определенный дисбаланс. Этот дисбаланс приводит к появлению разности амплитуд между компонентами выходного напряжения на катушке 6, которые обусловлены магнитной связью с катушками 4 и 5. На Фиг. 4С эта разность показана как вектор Ud. Графические ограничения не позволяют передать реальный масштаб различий между сигналами на рисунке. Величина Ud дисбаланса примерно в 20 раз меньше величины сигналов UA и UB, но примерно в 30 раз больше предела полезного сигнала Us. Как видно из векторной диаграммы, векторы напряжений дисбаланса Ud, начального выходного сигнала U0r, полезного сигнала Us, и выходного сигнала Ur ориентированны практически в одном направлении, за счет существенных различий длины сторон образуемых ими треугольников. Иными словами, можно сказать, что указанные напряжения почти совпадают по фазе.
При внесении листа 31 с областью 30 в область чувствительности датчика, выходной сигнал датчика меняется от значения U0r к значению Ur таким образом, что изменение амплитуды почти точно равняется амплитуде полезного сигнала Us. Такая особенность заявленного изобретения позволяет использовать простой амплитудный детектор для проведения точных измерений полезного сигнала.
Для измерения сигнала на выходе датчика 3, ток катушки 6 подается на вход селективного усилителя, выполненного на транзисторе 11 по схеме с общей базой. Ток смещения усилителя задается напряжением смещения на базе транзистора 11 и сопротивлением резистора 10. Для выработки постоянных напряжений смещения служит цепь из кремниевых диодов 20-23, резистора 19 и конденсаторов 17 и 18. Катушка 6 оказывается нагруженной на малый входной импеданс схемы с общей базой и, фактически, работает в режиме короткого замыкания. Ток короткого замыкания, пропорциональный ЭДС, передается транзистором 11 в колебательный контур, состоящий из катушки индуктивности 12, конденсатора 13 и резистора 14. Колебательный контур настроен в резонанс с частотой возбуждения. Резистор 14 определяет добротность контура и задает коэффициент передачи селективного усилителя.
Переход эмиттер-база транзистора 24 используется в качестве однополупериодного выпрямителя. Ток коллектора этого транзистора является выходным током выпрямителя. Такой выпрямитель преобразует входное напряжение в выходной ток. Отрицательная полуволна напряжения на базе транзистора 24 открывает переход эмиттер-база, а положительная полуволна запирает его. Во время отрицательной полуволны колебаний в контуре через коллектор транзистора 24 течет ток, а при отрицательной полуволне этот ток практически равен нулю. Дополнительное смещение, формируемое на базе транзистора 24 за счет падения напряжения на резисторе 14, снижает порог открытия перехода база-эмиттер и приближает передаточную характеристику выпрямителя к квадратичной. Использование биполярного транзистора в качестве квадратичного детектора в подобном включении хорошо известно специалистам и может быть найдено, например, в авторском свидетельстве SU1753913 (опубл. 20.12.1995, МПК H03D 1/18).
Вычитание постоянного уровня из выпрямленного сигнала реализовано на схеме, состоящей из транзистора 25 и резистора 27. Транзистор 25 включен по схеме с общей базой, за счет чего напряжение на его эмиттере стабильно и практически не изменяется. Ток коллектора транзистора 24 разделяется на неизменный ток, стекающий по резистору 27, и ток эмиттера транзистора 25. Ток коллектора транзистора 25 практически равен его току эмиттера и представляет собой результат вычитания. Конденсатор 28, совместно с резистором 27, обеспечивает фильтрацию частоты возбуждения, за счет чего ток коллектора транзистора 25 можно считать постоянным.
Необходимо отметить, что описанная схема вычитания, как и любая аналоговая схема, выполняющая арифметические операции, имеет ограниченный диапазон выходного сигнала. В описанной схеме, ток коллектора 25 не может быть отрицательным, а сам транзистор не должен находиться в режиме насыщения. Поэтому, она обеспечивает диапазон выходных напряжений в пределах от нулевого значения до примерно 2,4 В.
Ток коллектора транзистора 25 падает на резисторе 26, причем падение напряжения оцифровывается аналого-цифровым преобразователем 29. Аналого-цифровой преобразователь (АЦП) имеет рабочий диапазон входного напряжения от 0 до 2 В. Результат аналого-цифрового преобразования, пропорциональный измеряемой величине, считывается микроконтроллером измерительного прибора и используется далее для представления результатов измерения.
Если датчик 3 балансирован, то ЭДС катушки 6 мала, колебания в контуре 12-14 практически отсутствуют, переход эмиттер база транзистора 24 закрыт, коллекторные токи транзисторов 24 и 25 равны нулю, за счет чего напряжение на резисторе 26 и выходной код аналого-цифрового преобразователя 25 также равны нулю. Малые значения ЭДС, возникающие при внесении в датчик 3 листа 31 с ферромагнитными частицами в области 30, оказываются недостаточны для открытия эмиттерно-базового перехода транзистора 24. В таком состоянии, проводить измерения невозможно.
Чтобы настроить и откалибровать устройство измерения, в отсутствии листа 31 в датчике, необходимо начать перемещать подвижный контакт потенциометра 2. Возникающий за счет этого дисбаланс датчика приведет к увеличению ЭДС катушки 6 и соответствующему увеличению амплитуды колебаний в контуре 12-14. При достижении амплитудой колебаний порога открытия перехода эмиттер-база транзистора 24, на коллекторе этого транзистора появятся импульсы тока. Если и дальше увеличивать дисбаланс датчика, то увеличится среднее значение импульсного тока. Импульсы тока вызывают падение напряжения на резисторе 27, которое усредняется конденсатором 28. Как только напряжение на коллекторе достигнет приблизительно 3,2 В, что соответствует порогу открытия транзистора 25, через резистор 26 начнет течь ток, и на нем возникает падение напряжения. Для калибровки датчика нужно продолжать сдвигать контакт потенциометра 2 до тех пор, пока падение напряжения на резисторе 26 не достигнет величины 1,0 В, соответствующей рабочей точке в середине рабочего диапазона АЦП. В таком состоянии устройство готово к измерениям.
Отметим, что амплитуда напряжения на базе транзистора 24 в таком режиме существенно превышает порог открывания перехода эмиттер-база. Поэтому, транзистор 24 находится в открытом состоянии практически в течение полупериода этого напряжения (180 градусов). С весьма высокой точностью передаточная характеристика транзисторного детектора в открытом состоянии может быть представлена квадратичной зависимостью, что графически показано на Фиг. 5. Начальная точка оси напряжения соответствует начальному смещению на резисторе 14, а ток коллектора в этой точке - току покоя транзистора 24. Как видно из графика, для интервала изменения базового напряжения в пределах 70 мВ квадратичная аппроксимация хорошо отражает характеристику реального транзистора. В области отрицательных напряжений ток коллектора всегда меньше, чем весьма малое значение тока покоя, и им можно пренебречь.
Ток коллектора транзистора 24 описывается формулой, идентичной формуле (1) с точностью до измененных масштабных коэффициентов С и D, которые дополнительно учитывают параметры входного усилительного каскада с общей базой (элементы 9 - 16 на Фиг. 2):

В отсутствии листа 31 полезный сигнал Us приравнивается к нулю. Поэтому, усредненный ток коллектора транзистора 24 определяется постоянным уровнем дисбаланса Ud как

с учетом постоянных падений напряжения на резисторах 26 и 27. Фиксированные значения падений напряжения 1,0 В и 3,3 В соответствуют рабочей точке схемы, которая была установлена в результате калибровки. В данном рассмотрении мы считаем, что сигналом помехи Um можно пренебречь.
После внесения в датчик листового материала с ферромагнитными частицами, ЭДС катушки 6 изменяется. На практике, это изменение не превышает нескольких процентов от величины дисбаланса, полученной в ходе калибровки. Изменение может быть положительным либо отрицательным, в зависимости от того, в магнитную цепь какой из катушек возбуждения 4 и 5 попадет магнитный материал. Без нарушения общности, мы будем считать, что ЭДС увеличилась.
Увеличение ЭДС практически не изменяет продолжительности интервала, в течение которого транзистор 24 открыт.Этот интервал продолжает оставаться очень близким к 180 градусам. Можно говорить о синхронном выпрямлении (детектировании) на транзисторе 24, где в качестве опорного сигнала, управляющего его открытием и закрытием, выступает сам сигнал на входе выпрямителя, пропорциональный напряжению Ur на выходе датчика 3. Рост ЭДС приводит к увеличению амплитуды импульсов и среднего тока коллектора транзистора 24. В формуле (2) появляется соответствующий ненулевой член DUsUd, пропорциональный полезному сигналу. Ток коллектора можно оценить, с учетом рабочей точки, как  . В то же время
. В то же время  , откуда получаем
, откуда получаем

Член DUsUd, после усреднения, дает постоянную величину, пропорциональную напряжению дисбаланса Ud и полезному сигналу Us, который линейно связан с измеряемой величиной. То есть, напряжение, оцифровываемое АЦП 29, пропорционально измеряемой величине и имеет начальную точку 1,0 В.
Необходимо отметить, что, для измерения малых полезных сигналов, коэффициент передачи устройства от входа к выходу нужно сделать большим. Из-за этого приходится достаточно тщательно настраивать значение дисбаланса Ud, чтобы вывести выходной сигнал в рабочую точку. При этом, нужное значение Ud с достаточно высокой точностью уже известно из конструктивных параметров откалиброванной схемы устройства в соответствии с уравнением (3), так что при настройке требуется лишь незначительно скорректировать его значение по отношению к расчетной величине. Таким образом, можно считать Ud константой. Поэтому тот факт, что Ud входит в качестве коэффициента в уравнение (4) для результата измерения, на самом деле, не приводит к существенному ухудшению точности измерений.
В реальных применениях, может оказаться, что ферромагнитный материал в области 30, на частоте возбуждения, вносит заметный фазовый сдвиг в полезный сигнал Us. Этот случай показан на векторной диаграмме на Фиг. 6А. Различие абсолютной величины начального значения выходного напряжения датчика и0 г и выходного напряжения датчика при проведении измерения Ur практически равно проекции Usr на полезного сигнала Us на направление вектора Ur. То есть, напряжение на АЦП 29 пропорционально проекции полезного сигнала Us на направление напряжения Ur, которое практически совпадает с направлением напряжения дисбаланса Ud. Из этого следует, что результат измерения пропорционален вещественной части эффективной магнитной проницаемости, измеряемой датчиком, и мало зависит от ее комплексной части.
Аналогичные рассуждения верны и для помехи Um, если она совпадает по частоте с частотой возбуждения, как показано на Фиг. 6В. На результат измерения влияет только проекция помехи Umr на направление вектора Ur, которое практически совпадает с направлением напряжения дисбаланса Ud. Компонента помехи, ортогональная указанному направлению, практически не влияет на напряжение на АЦП 29. В частности, это устраняет влияние паразитных связей и задержек распространения в проводниках датчика, ответственных за появление ортогональной компоненты U0r выходного сигнала датчика. Требования к малому различию фаз токов в катушках 4 и 5, включенных в схему балансировки, обычно важны для дифференциальных датчиков при работе в режиме наилучшей балансировки, поскольку они порождают неустранимую ортогональную ошибку балансировки. Однако, при использовании заявленного способа эти требования могут быть значительно смягчены.
Появление помехи Um в виде нечетной гармоники напряжения возбуждения, соизмеримой с диапазоном полезного сигнала, не влияет на результат измерений, как уже было показано выше при анализе формулы (1). Это существенно отличается от результатов работы обычного амплитудного детектора, который не обладает частотной избирательностью и беспрепятственно передает на выход отклик на гармоническую помеху. Наихудшим случаем работы для амплитудного детектора является полезный сигнал, близкий к нулю. Он будет практически полностью перекрыт помехой, в то время как при использовании заявленного способа даже очень малый полезный сигнал не будет подавляться.
Важно отметить, что, как известно из уровня техники, даже в случае использования синхронного детектора, подавление гармоник обеспечивается далеко не всегда. На практике, широко используют синхронные детекторы, выполненные на основе аналоговых ключей, коммутируемых опорным сигналом. Пример применения подобного синхронного детектора для обработки сигнала емкостного дифференциального датчика приведен в патенте США US 5394969 (опубл. 07.03.1995, МПК G07D 7/00). В указанном решении, синхронный детектор не подавляет помехи с частотами высших гармоник напряжения опоры, что приводит к появлению дополнительных погрешностей.
В радиотехнике, помеху считают коррелированной с определенным периодическим сигналом, если ее спектр состоит из линий с частотой этого сигнала либо с частотами, которые кратны частоте данного сигнала. Прохождение на выход устройства спектральных компонент помехи, некоррелированной с опорным сигналом, роль которого выполняет сигнал дисбаланса Ud, как и всегда при синхронном детектировании, ограничивается полосой пропускания усредняющего фильтра 27-28 на выходе выпрямителя. При большой постоянной времени этого фильтра можно практически полностью подавить такие помехи. Так, при постоянной времени τ=R26C28 равной 0,2 с полоса пропускания для некоррелированных помех будет уже, чем 1 Гц, и ее центр будет располагаться на частоте возбуждения. Реальное время установления уровня на входе АЦП 29 при таком выборе полосы пропускания не превышает 1 секунды.
При использовании описанного способа полностью отсутствует порог чувствительности, то есть, даже очень малый полезный сигнал датчика 3 вызывает пропорциональный отклик выходного напряжения на резисторе 26. Это связано с тем, что при выпрямлении полезный сигнал обрабатывается в сумме с мощным сигналом дисбаланса, который удерживает транзистор 24 в линейном режиме и не дает ему уходить в режим отсечки в течение почти всего активного полупериода. Данная особенность отличает описанный способ от обычного амплитудного детектора, обладающего сильной нелинейностью для малых сигналов.
Описанное устройство обладает особенностью, которую необходимо учитывать при практическом применении. Выходное напряжение устройства заметно меняется при изменении температуры, так как температура изменяет параметры р-n -переходов в диодах и транзисторах. Чтобы эти изменения не вносили существенных погрешностей, желательно проводить регулярную автоматизированную калибровку устройства. Для этого можно использовать схему балансировки датчика, управляемую от микроконтроллера. Например, вместо потенциометра 2 может быть применен цифровой потенциометр, в котором положение подвижного контакта задается цифровым кодом, подаваемым от микропроцессора. Непосредственно, перед каждым измерением, необходимо проводить цикл автоматической калибровки, в ходе которого микропроцессор перебирает различные значения кода управления цифровым потенциометром, до тех пор, пока на входе АЦП 29 не будет достигнуто требуемое начальное значение, соответствующее расчетной рабочей точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРИ ПОМОЩИ ДИФФЕРЕНЦИАЛЬНОГО ДАТЧИКА | 2019 |
|
RU2717904C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Устройство для контроля твердости ферромагнитных изделий | 1991 |
|
SU1779988A1 |
| Феррометр для тонких магнитных пленок | 2022 |
|
RU2795378C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕНИОСТИ МАГНИТНОГО ПОЛЯ | 1970 |
|
SU263729A1 |
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| ТОНКОПЛЕНОЧНАЯ МАГНИТНАЯ АНТЕННА | 2019 |
|
RU2712922C1 |
| ИЗМЕРИТЕЛЬ РАССТОЯНИЯ МЕЖДУ ДАТЧИКОМ И ОБЪЕКТОМ ИЗ ЭЛЕКТРОПРОВОДЯЩЕГО МАТЕРИАЛА | 2013 |
|
RU2561244C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ ДЛЯ ЕМКОСТНОГО ДАТЧИКА | 2019 |
|
RU2724299C1 |
Изобретение относится к области измерительной техники. Технический результат заявленной группы изобретений - обеспечение точности и чувствительности измерений, выполняемых дифференциальным датчиком, при упрощении конструкции устройства. В способе косвенного измерения до проведения измерений обеспечивают заданный дисбаланс дифференциального датчика, существенно превышающий рабочий диапазон изменения измеряемой величины, выполняют требуемое измерение с получением выходного сигнала датчика, выходной сигнал датчика подвергают выпрямлению, из выпрямленного сигнала вычитают заранее заданное постоянное значение, величину сигнала, полученного после вычитания, измеряют и используют для нахождения значения измеряемой величины, причем дисбаланс датчика и вычитаемое заранее заданное постоянное значение выбирают исходя из условия, чтобы между измеряемой величиной, находящейся в рабочем диапазоне, и величиной сигнала, полученного после вычитания, обеспечивалась монотонная зависимость. Устройство для косвенного измерения содержит дифференциальный датчик, возбуждаемый переменным напряжением и имеющий дисбаланс, существенно превышающий рабочий диапазон изменения измеряемой величины, выпрямитель для выпрямления выходного сигнала дифференциального датчика, схему вычитания для вычитания постоянного значения из выходного сигнала выпрямителя и измерительное устройство для измерения величины сигнала на выходе схемы вычитания. 2 н. и 15 з.п. ф-лы. 6 ил.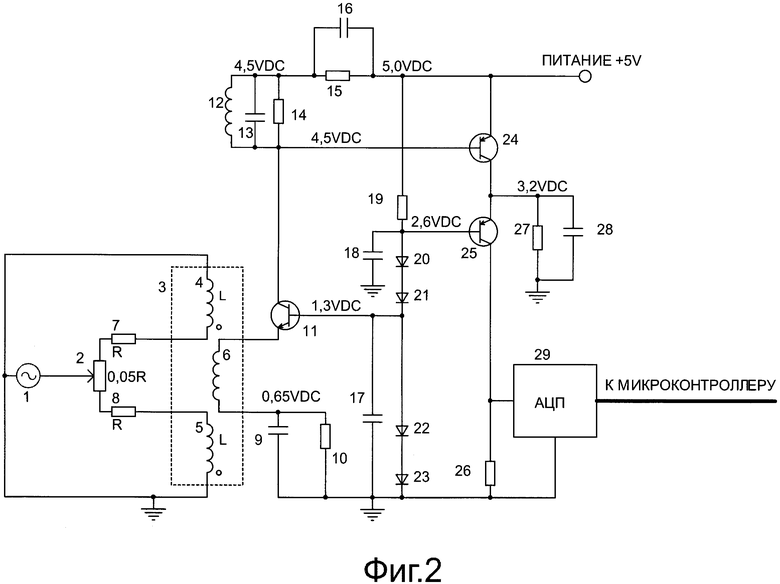
1. Способ косвенного измерения при помощи дифференциального датчика, возбуждаемого переменным напряжением, в котором до проведения измерений обеспечивают заданный дисбаланс дифференциального датчика, существенно превышающий рабочий диапазон изменения измеряемой величины, выполняют требуемое измерение с получением выходного сигнала датчика, выходной сигнал датчика подвергают выпрямлению, из выпрямленного сигнала вычитают заранее заданное постоянное значение, величину сигнала, полученного после вычитания, измеряют и используют для нахождения значения измеряемой величины, причем дисбаланс датчика и вычитаемое заранее заданное постоянное значение выбирают исходя из условия, чтобы между измеряемой величиной, находящейся в рабочем диапазоне, и величиной сигнала, полученного после вычитания, обеспечивалась монотонная зависимость.
2. Способ по п. 1, в котором до выпрямления осуществляют полосовую фильтрацию выходного сигнала датчика с целью выделения частоты напряжения возбуждения.
3. Способ по п. 2, в котором сигнал после выпрямления фильтруют для подавления, по меньшей мере, частоты напряжения возбуждения датчика и более высоких частот.
4. Способ по п. 3, в котором для выпрямления используют выпрямитель, имеющий передаточную характеристику, близкую к квадратичной.
5. Способ по п. 2, в котором полученное после вычитания значение сигнала дополнительно подвергают усреднению.
6. Способ по п. 5, в котором для выпрямления используют выпрямитель, имеющий передаточную характеристику, близкую к квадратичной.
7. Способ по п. 2, в котором для обеспечения заданного дисбаланса подвергают датчик калибровке путем выполнения следующей последовательности действий: переводят датчик в состояние, соответствующее исходному значению измеряемой величины, по меньшей мере один раз, выполняют последовательность шагов, состоящую из
- выпрямления выходного сигнала,
- вычитания заранее заданного постоянного значения,
- измерения величины сигнала после вычитания и нахождения на его основе измеряемой величины,
и повторяют указанную последовательность, предварительно изменяя дисбаланс датчика до тех пор, пока полученное значение измеряемой величины не достигнет заданного исходного значения.
8. Способ по п. 2, в котором для обеспечения заданного дисбаланса подвергают датчик калибровке путем выполнения следующей последовательности действий: переводят датчик в состояние, соответствующее исходному значению измеряемой величины, по меньшей мере один раз, выполняют последовательность шагов, состоящую из
- выпрямления выходного сигнала,
- вычитания заранее заданного постоянного значения,
- измерения величины сигнала после вычитания и нахождения на его основе измеряемой величины,
и повторяют указанную последовательность, предварительно изменяя вычитаемое постоянное значение до тех пор, пока полученное значение измеряемой величины не достигнет заданного исходного значения.
9. Устройство для косвенного измерения, содержащее дифференциальный датчик, возбуждаемый переменным напряжением и имеющий дисбаланс, существенно превышающий рабочий диапазон изменения измеряемой величины, выпрямитель для выпрямления выходного сигнала дифференциального датчика, схему вычитания для вычитания постоянного значения из выходного сигнала выпрямителя, и измерительное устройство для измерения величины сигнала на выходе схемы вычитания.
10. Устройство по п. 9, в котором дифференциальный датчик дополнительно оснащен схемой усиления сигнала на выходе датчика, имеющей полосовую частотную характеристику.
11. Устройство по п. 10, в котором для обеспечения дисбаланса дифференциальный датчик выполнен с асимметрией конструктивных элементов.
12. Устройство по п. 10, в котором дифференциальный датчик выполнен с возможностью регулировки дисбаланса.
13. Устройство по п. 10, в котором схема вычитания выполнена с возможностью регулировки постоянного вычитаемого значения.
14. Устройство по п. 10, в котором выпрямитель дополнительно оснащен фильтром низких частот с возможностью подавления частоты возбуждения дифференциального датчика и более высоких частот в выходном сигнале выпрямителя.
15. Устройство по п. 10, в котором выпрямитель имеет передаточную характеристику, близкую к квадратичной.
16. Устройство по п. 10, в котором измерительное устройство связано с выходом фильтра низких частот, вход которого связан с выходом схемы вычитания.
17. Устройство по п. 16, в котором фильтр низких частот содержит интегратор.
| US 8026716 B2, 27.09.2011 | |||
| US 6995021 B2, 07.02.2006 | |||
| US 20110089938 A1, 21.04.2011 | |||
| СПОСОБ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ С ДИФФЕРЕНЦИАЛЬНЫХ ИНДУКТИВНЫХ ИЛИ ЕМКОСТНЫХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2514158C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕПАДА ДАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2027158C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИЗОЛЯЦИИ СЕТИ ПОСТОЯННОГО ТОКА И ПОИСКА МЕСТ УХУДШЕНИЯ ИЗОЛЯЦИИ | 2004 |
|
RU2284537C2 |

