Изобретение относится к машиностроению и может быть использовано в манипуляторах различного назначения , в частности при сборке микрЪ
сборок.
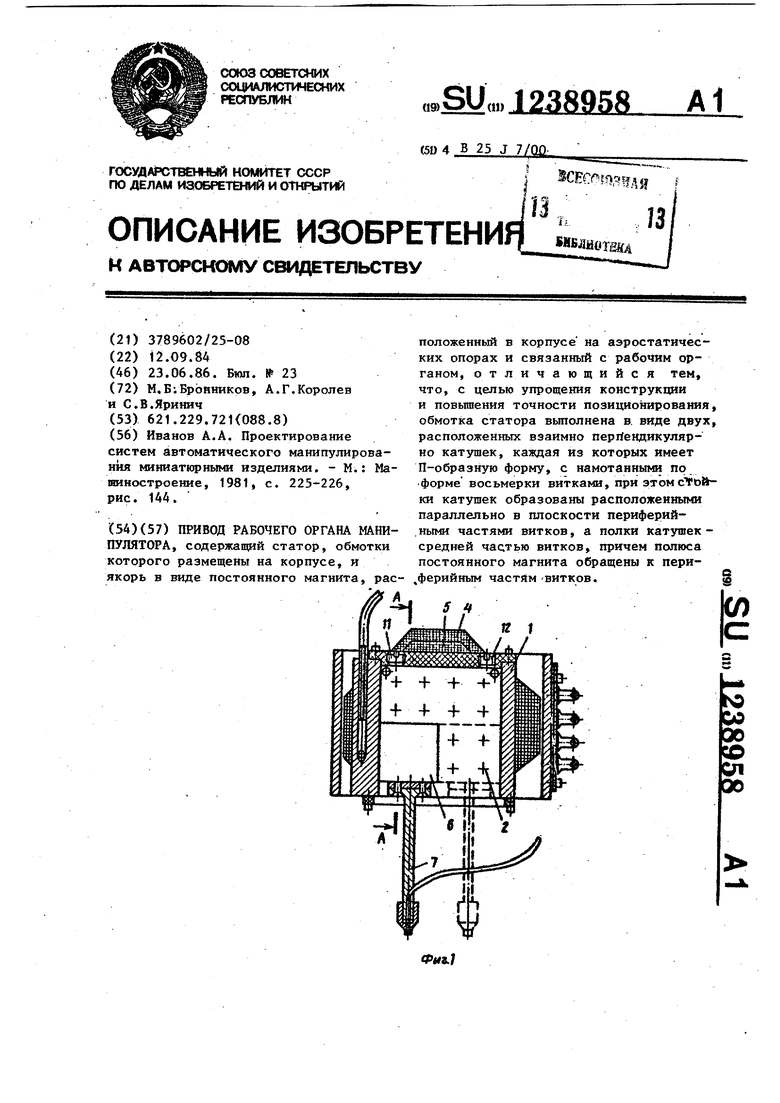
Цель изобретения - упрощение конструкции и повьппение точности позиционирования .
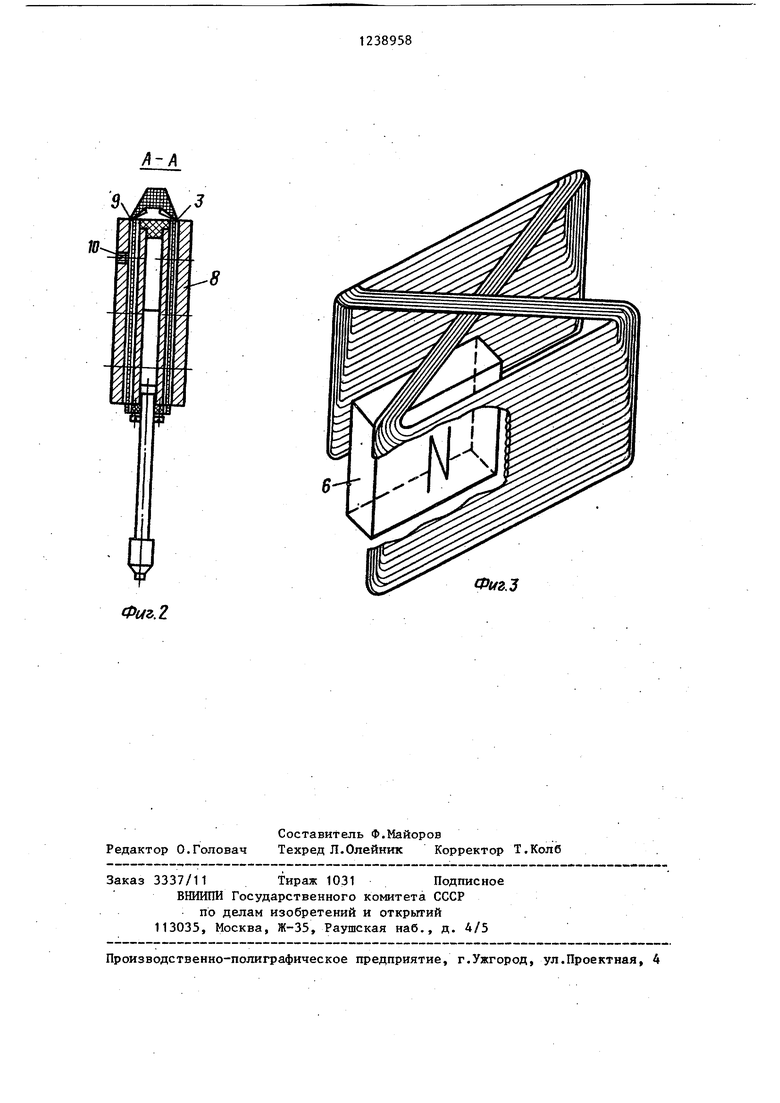
На фиг. 1 изображен манипулятор, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - обмотка статора с якорем.
Манипулятор содержит немагнитный сборный корпус 1 Б виде плоского прямоугольного параллелепипеда. Корпус снабжен равномерно расположенными от- верс тиями 2 диаметром 0,2-0,3 мм, которые соединяются с магистралью избы- точного давления воздуха. Для этого к наружным поверхностям корпуса 1 с двух сторон приложены резиновые прокладки 3 с вырезами под каналы подвода воздуха к.отверстиям 2. На прокладку 3 укладывается обмотка статора, которая вьшолнена в виде двух распо- ложенных взаимно перпендикулярно катушек 4 и 5, каждая из которых выполнена П-образной формы с намотанными по форме восьмерки витками, при зтом стойки катушек 4 и 5 образованы рас- положенными параллельнъ в плоскости периферийными частями витков, полка - средней частью витков (фиг. 3).
Внутри корпуса имеется якорь 6 из плоского магнита, к которому че
10
1238958 . 2
рез магнитную прокладку притянут вакуумный схват 7. Вся эта конструкция помещается в наружный корпус 8 из магнитного материала для замыкания 5 магнитных силовых линий и концентрации усилия и сжимается через изоляционные прокладки 9 винтами 10 с двух сторон, создавая герметичность подводных каналов воздушной подушки индикатора.
,
I В двух верхних положениях корпуса 1 установлены свето- и фотодиоды 11 для сигнализации местонахождения индуктора 6, а также магнитные вставки 12 для удержания индуктора 6 в верхнем положении при обесточенных катушках статора.
Манипулятор работает следукнцим образом.
Манипулятор устанавливается над вибропитателем компонентов. Включаются попеременно в соответствии с заданной программой катушки 4 и 5 статора. Якорь 6 в зависимости от их управления перемещается в четыре угловых положения.. При движении вниз схват 7 упирается и присасывает его, |3атем выходит из зоны захвата в верхнее положение, где осзществляется его контроль свето- и фотодиодами 12. Далее якорь 6 перемещается перпендикулярно в следукщее верхнее положение и затем опускается вниз, осзще- Ьтвляя установку компонента.
А-А
Фиг.З
Фиг.2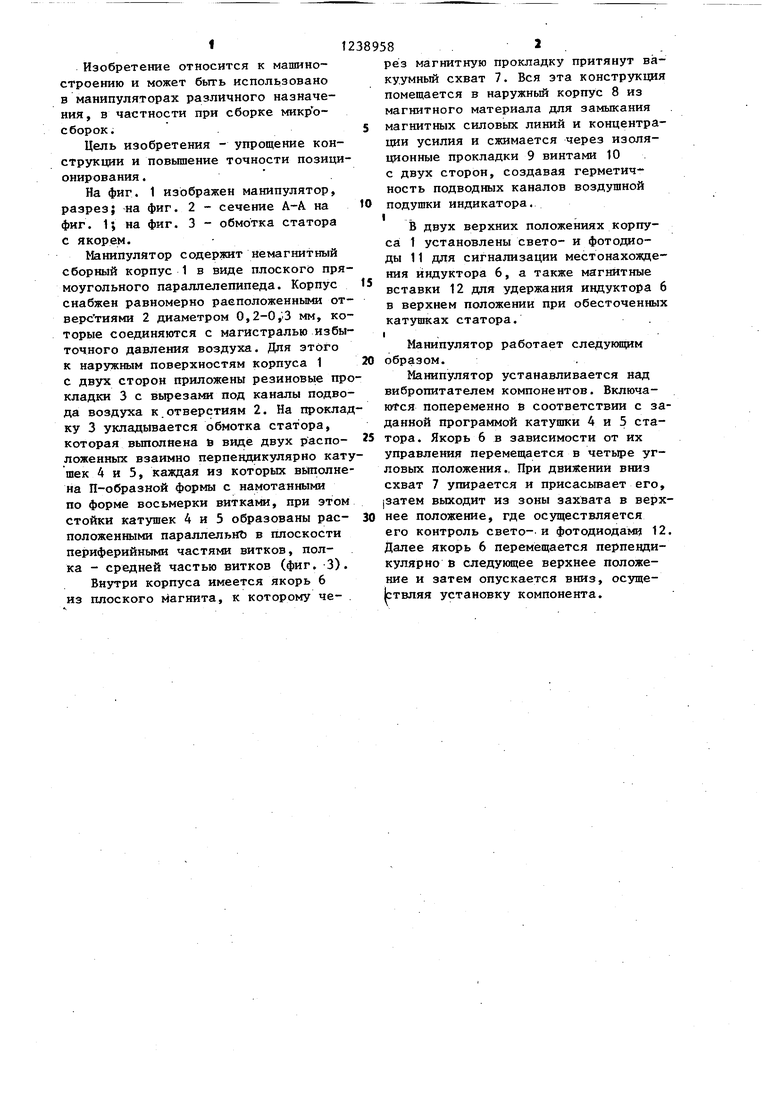
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| МНОГОФАЗНЫЕ СТРУКТУРЫ ЗУБЧАТЫХ ПОЛЮСОВ ДЛЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2003 |
|
RU2330368C2 |
| Электрическая машина преимущественно постоянного тока | 1982 |
|
SU1138895A1 |
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 1994 |
|
RU2091971C1 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 2023 |
|
RU2820845C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2389125C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079952C1 |
| Индукционная установка | 1985 |
|
SU1384622A1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2472275C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2003 |
|
RU2254661C1 |
| Иванов А.А | |||
| Проектирование систем автоматического манипулирования миниатюрными изделиями | |||
| - М.: Машиностроение, 1981, с | |||
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
