Изобретение стыковочное устройство относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для работы со сменными рабочими органами - инструментами и схватами, установленными в инструментальных магазинах или кассетах.
Известно стыковочное устройство (А.С. SU №1301697, МПК B25J 15/04), содержащее присоединительные дискообразные элементы, закрепленные на конечном звене - кисти манипулятора и на корпусе рабочего органа (схвата или инструмента), два посадочных элемента в виде штырей (пальцев) со скошенными пазами установленных на одном присоединительном элементе, зеркально расположенных базовым (посадочным) отверстиям, выполненным на другом.
В качестве прототипа выбрано устройство для смены захватных устройств (схватов), конструкция которого приведена в книге: Робототехнические системы в сборочном производстве / Под ред. Е.В. Пашкова - К.: Вища шк. Головное издательство, 1987. - С. 81, рис. 3.11, в. Устройство содержит присоединительные элементы в виде фланцев, центрирование которых относительно друг друга осуществляется с помощью зеркально в них расположенных пальцев и отверстий под них. Два пальца выполнены коническими и обеспечивают предварительное центрирование, а два - цилиндрическими, для осуществления окончательного центрирования. Фиксация фланцев между собой осуществляется с помощью центрального круглого электромагнита с отверстием в сердечнике под круглый электрический разъем или штуцера для подвода сжатого воздуха.
Основным недостатком присущим приведенным в качестве аналога и прототипа стыковочных устройств для сменных инструментов или захватных органов является то, что для осуществления надежного сопряжения цилиндрических пальцев с отверстиями необходимо обеспечить либо выполнение межцентровых расстояний между пальцами и отверстиями с высокой точностью, что усложняет технологический процесс и приводит к росту временных и материальных затрат, либо увеличение гарантированного зазора в соединении «палец-отверстие», что снижает точность позиционирования инструмента или схвата.
Кроме того, в конструкции стыковочного устройства, выбранного в качестве прототипа, межцентровое расстояние между центрирующими пальцами диаметрально установленными в корпусе (магнитопроводе) электромагнита будет изменяться по причине тепловой деформации, возникающей под воздействием тепла, выделяемого при работе электромагнита, что приведет к снижению надежности стыковки, а поскольку между якорем электромагнита входящим в состав, например, схвата отсутствует антимагнитный экран, будет происходить рассеивание магнитного потока, вызывающее, во-первых, уменьшение тягового усилия, определяющего надежность стыковки (фиксации), а во-вторых, намагничивание ферромагнитных частей инструментов и схватов (остаточный магнетизм), что также негативно отражается на надежности работы устройства и сужает технологические возможности.
Цель, достигаемая с помощью предлагаемого изобретения стыковочного устройства, заключается в повышении технологичности изготовления и надежности работы за счет снижения требований к точности относительного расположения центрирующих (базирующих) элементов и уменьшения потерь создаваемого электромагнитом магнитного потока, определяющего величину тягового усилия, а следовательно, и надежность фиксации присоединительных элементов относительно друг друга.
Достижение поставленной цели обеспечивается тем, что в стыковочном устройстве для установки и закрепления расположенных в магазине сменных инструментов и схватов на конечном звене манипулятора промышленного робота, содержащем обращенные одна к другой стыковочные поверхности присоединительных элементов с зеркально расположенными центрирующими элементами в виде пальцев и отверстий под них, фиксирующий присоединительные элементы между собой электромагнит и коммутационные разъемы на стыковочных поверхностях для связи инструментов и схватов с источниками энергии, использованы следующие технические решения:
- конечное звено манипулятора и корпусы инструментов и схватов снабжены присоединительными платформами из немагнитного материала;
- на стыковочной поверхности конечного звена манипулятора выполнены два отверстия, в которых соосно установлены электромагниты с втяжным якорем;
- корпусы электромагнитов выполнены в виде чашек с крышками из ферромагнитного материала, причем последние выполнены заодно с сердечниками катушек, установленных внутри корпусов;
- сердечники катушек имеют на плоских торцах воротнички, шунтирующие магнитный поток;
- обращенные в сторону пальцев донышки чашек имеют центральные отверстия с направляющими фасками, являющиеся центрирующими элементами для закрепленных на другой платформе пальцев из ферромагнитного материала, снабженных фланцами с наружным диаметром, равным диаметру корпуса электромагнита;
- пальцы с фланцами являются втяжными якорями электромагнитов;
- один из пальцев выполнен цилиндрическим, а другой, выполненный с поперечным сечением в форме ромба, имеет продольные ленточки, являющиеся частями первоначальной наружной цилиндрической образующей пальца, расположенные в плоскости, проходящей через большую диагональ упомянутого ромба, перпендикулярную линии, проходящей через центры этих двух пальцев.
Между совокупностью заявляемых признаков изобретения и ожидаемыми техническими результатами, получаемыми с помощью предлагаемого стыковочного устройства, существует следующая причинно-следственная связь.
Во-первых, выполнение одного из центрирующих пальцев с поперечным сечением, имеющим форму ромба, т.е. ромбическим, и его установка на присоединительной платформе относительно другого пальца таким образом, чтобы большая диагональ ромба была перпендикулярной линии, проходящей через центры этих пальцев, позволяет снизить требования к точности получения заданной величины межцентрового расстояния между ними, а следовательно, уменьшить связанные с этим временные и материальные затраты, обеспечив при этом необходимую надежность сопряжения пальцев с отверстиями под них и требуемую точность позиционирования сменного инструмента или схвата в рабочей зоне.
Во-вторых, выполнение присоединительных платформ из немагнитного материала, например, алюминиевого сплава, т.е. возложение на них функций антимагнитных экранов, позволяет избежать рассеивание магнитного потока и намагничивание (остаточный магнетизм) ферромагнитных частей инструмента, схвата и конечного звена манипулятора робота, снижающее величину тягового усилия, определяющего надежность фиксации платформ между собой и выполнения возложенных на них технологических задач.
В-третьих, снабжение плоской торцовой поверхности сердечника электромагнита шунтирующим воротничком способствует увеличению тягового усилия в конечном положении якоря внутри катушки, а следовательно, увеличению надежности фиксации платформ между собой и достижению требуемой точности позиционирования инструментов и схватов.
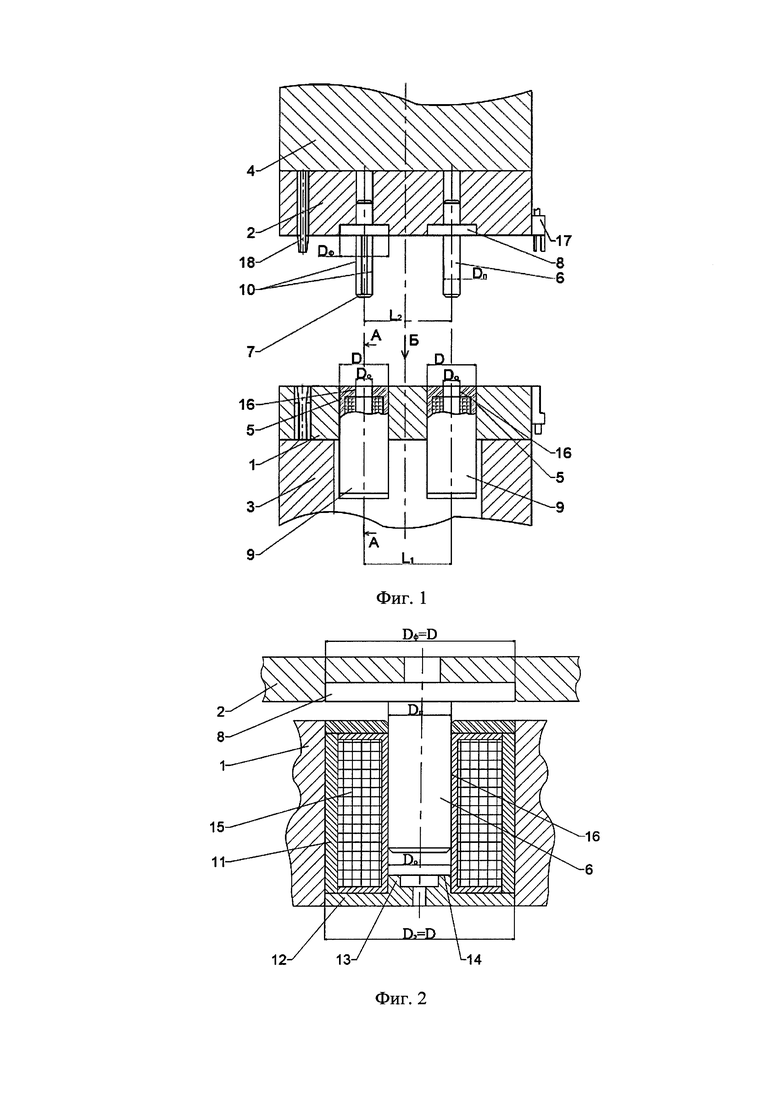
На фиг. 1 приведена схема относительного расположения присоединительных платформ инструментов (схватов) и конечного звена манипулятора; на фиг. 2 - сечение по А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1, схема для определения размера ленточки ромбического пальца; на фиг. 4 - схема для определения погрешности установки сменных инструментов (схватов) на присоединительной платформе конечного звена манипулятора.
Стыковочное устройство содержит присоединительные платформы 1 и 2 из немагнитного материала, например, алюминиевого сплава (фиг. 1), являющимися составными частями соответственно конечного звена 3 манипулятора робота и корпусов 4 сменных инструментов (схватов).
На стыковочной поверхности платформы конечного звена манипулятора выполнены с межцентровым расстоянием L1 два отверстия 5 диаметром D, а на обращенной к ней стыковочной поверхности другой платформы установлены с межцентровым расстоянием L2=L1 центрирующие пальцы 6 и 7 диаметром Dп с фланцами 8 диаметром Dф=D, первый из которых выполнен цилиндрическим, а второй - ромбическим, т.е. имеющим поперечное сечение в форме ромба, одновременно являющиеся втяжными якорями электромагнитов 9, закрепленных в отверстиях платформы конечного звена манипулятора (фиг. 2), причем большая диагональ ромба расположена в плоскости, перпендикулярной линии, проведенной через центры этих пальцев (фиг. 3). В этой же плоскости расположены две продольные, т.е. по длине пальца, ленточки 10 шириной 2е, являющиеся частями первоначальной наружной цилиндрической образующей ромбического пальца диаметром Dп.
Каждый из электромагнитов с втяжным якорем содержит образующие ферромагнитный статор корпус 11 в виде чашки диаметром Dэ=D и крышку 12, выполненную заодно с сердечником 13, плоский торец которого снабжен кольцевым шунтирующим воротничком 14. Сердечник размещен внутри катушки 15, установленной в корпусе электромагнита.
В обращенных в сторону центрирующих пальцев донных частях корпусов электромагнитов выполнены центрирующие отверстия 16 с направляющими фасками, межцентровое расстояние между которыми равно межцентровому расстоянию L1 между отверстиями в платформе для установки и закрепления электромагнитов.
Для подвода электрической энергии к инструментам и схватам в присоединительных платформах установлены ответные части электрического разъема 17 и пневматического разъема 18.
Процесс стыковки протекает следующим образом.
При перемещении с помощью манипулятора присоединительной платформы 1 в сторону расположенной напротив присоединительной платформы 2 до полного контакта между собой их стыковочных поверхностей происходит ввод центрирующих пальцев 6 и 7 в соответствующие центрирующие отверстия 16 в донных частях корпусов 11 и в отверстия катушек 15 электромагнитов 9, а также соединение контактов электрического разъема 17 и ответных частей пневматического разъема 18. При этом концы пальцев (якорей) располагаются с минимальным гарантированным зазором относительно кольцевого шунтирующего воротничка 14 на конце сердечника 13. Затем на обмотки катушек подается электрическое напряжение, вызывающее образование магнитного потока Ф, создающего тяговое усилие F, которое осуществляет окончательную фиксацию между собой присоединительных платформ.
Наличие на центрирующих пальцах (якорях) фланцев 8 и кольцевого шунтирующего воротничка 14 на сердечнике способствует увеличению тягового усилия F в конце ввода пальцев внутрь катушек, а следовательно, увеличению надежности стыковки платформ (Пашков Е.В., Осинский Ю.А., Четверкин А.А. Электропневмоавтоматика в производственных процессах: Учеб. пособие. - Севастополь: Изд-во Сев ГТУ, 1997. - С. 252-254; Казаков Л.А. Электромагнитные устройства РЭА: Справочник. - М.: Радио и связь, 1991. - 352 с.).
При постоянной величине межцентрового расстояния L1 между центрирующими отверстиями 16 и постоянными по величине диаметрами D0 высокая точность выполнения которых достигается с помощью сравнительно простых и малозатратных технологических процессов обработки (развертывание и наружное шлифование), высокая надежность осуществления сопряжения пальцев с отверстиями под них в основном зависит от точности выполнения межцентровых расстояний между и схватов, для обеспечения которой требуется более дорогостоящее технологическое оборудование и обрабатывающий инструмент, что приводит к увеличению материальных затрат.
Выполнение одного из центрирующих пальцев ромбическим значительно снижает материальные затраты, так как в этом случае точность выполнения межцентрового расстояния между пальцами может быть значительно уменьшена без снижения надежности сопряжения пальцев с отверстиями.
Ширина ленточек поперечного сечения ромбического пальца (фиг. 4) определяется следующим образом (Корсаков B.C. Основы конструирования приспособлений в машиностроении. - М.: Машиностроение, 1965. - С. 59-62).
Из треугольников okn и omn
R02-(c+e)2=(R0-Δ)2-e2,
откуда
e=(2R0Δ-Δ2-c2)/2c.
Заменяя 2R0=D0 и принимая Δ2=0, так как эта величина второго порядка малости, получаем
2e=(D0Δ')/2c-c,
где Δ'=2Δ - диаметральный зазор.
В свою очередь,
2с=δ+δ'-2Δ1,
где δ - допуск на межцентровое расстояние L1 между центрирующими отверстиями;
δ' - допуск на межцентровое расстояние L2 между центрирующими пальцами;
2Δ1 - диаметральный зазор в соединении цилиндрического пальца с отверстием.
Последнее выражение имеет смысл при условии
δ+δ'>2Δ1,
использование которого позволяет определить условие для обоснования величины допуска на межцентровое расстояние L2, которое обеспечит требуемую точность позиционирования (базирования) инструмента (схвата):
δ'≥2Δ1-δ.
Смещение платформы сменного инструмента (схвата) от ее среднего положения в направлениях, перпендикулярных к оси цилиндрического пальца (фиг. 4), определяются минимальным радиальным зазором Δ1, допуском на диаметр сопрягаемого отверстия δ1 и допуском на диаметр пальца δ1'.
Наименьшее смещение равно Δ1, а наибольшее равно
Δ1+δ1'/2+δ1/2.
По величине смещения определяется погрешность установки инструмента (схвата) для тех или иных выполняемых размеров (диаметров) пальцев и отверстий под них.
Наибольший возможный угол перекоса α платформы инструмента (при его малых значениях)
sin α≈α=(Δ1+δ1/2+δ1'/2+Δ+δ2/2+δ2'/2)/L1,
где L1 - межцентровое расстояние между центрирующими отверстиями;
Δ - минимальный радиальный зазор в соединении ромбического пальца с отверстием;
δ2 - допуск на диаметр отверстия под ромбический палец;
δ2' - допуск на диаметр (по ленточкам) ромбического пальца.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНОЙ ТЯГОВОЙ ХАРАКТЕРИСТИКОЙ (ВАРИАНТЫ) | 1995 |
|
RU2089995C1 |
| Манипулятор для движения каретки тросового лифта вдоль троса | 2023 |
|
RU2823642C1 |
| Механизм для запуска наноспутников | 2023 |
|
RU2829378C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2084071C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Самоустанавливающаяся сборочная головка | 1986 |
|
SU1342658A1 |

Изобретение относится к стыковочному устройству для установки и закрепления расположенных в магазине сменных инструментов и схватов на конечном звене манипулятора промышленного робота. Устройство содержит обращенные одна к другой стыковочные поверхности присоединительных элементов с зеркально расположенными на них центрирующими элементами в виде пальцев и отверстий под них, при этом конечное звено манипулятора и корпусы инструментов и схватов снабжены присоединительными платформами из немагнитного материала, на стыковочной поверхности платформы конечного звена манипулятора выполнены два отверстия, в которых соосно установлены электромагниты с втяжным якорем, ферромагнитные корпуса которых в виде чашек снабжены крышками, выполненными заодно с сердечниками катушек, установленных внутри корпусов и снабженных шунтирующими воротничками на плоских торцах упомянутых сердечников. Обращенные в сторону пальцев донышки чашек имеют снабженные направляющими фасками центральные отверстия, являющиеся центрирующими элементами для двух ферромагнитных пальцев, снабженных фланцами с диаметрами, равными наружному диаметру корпусов электромагнитов, закрепленных на другой платформе, которые являются втяжными якорями упомянутых электромагнитов. При этом один из пальцев выполнен цилиндрическим, другой палец, выполненный с поперечным сечением в форме ромба, имеет две продольные ленточки, являющиеся частями первоначальной наружной цилиндрической образующей пальца, расположенные в плоскости, проходящей через большую диагональ упомянутого ромба, перпендикулярную линии, проведенной через центры пальцев. Технический результат заключается в повышении технологичности изготовления и надежности работы. 4 ил.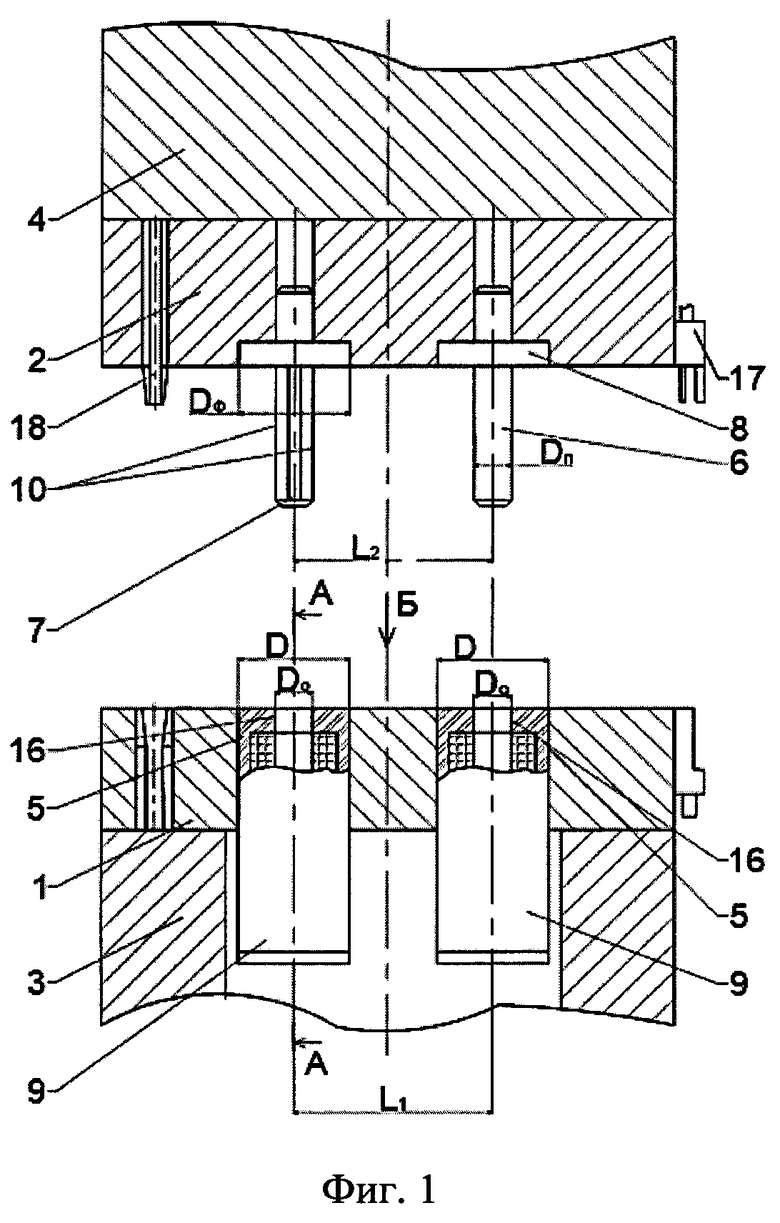
Стыковочное устройство для установки и закрепления расположенных в магазине сменных инструментов и схватов на конечном звене манипулятора промышленного робота, включающее обращенные одна к другой стыковочные поверхности присоединительных элементов с зеркально расположенными на них центрирующими элементами в виде пальцев и отверстий под них, фиксирующий присоединительные элементы между собой электромагнит и коммутационные разъемы на стыковочных поверхностях для связи инструментов и схватов с источниками энергии, отличающееся тем, что конечное звено манипулятора и корпусы инструментов и схватов снабжены присоединительными платформами из немагнитного материала, на стыковочной поверхности платформы конечного звена манипулятора выполнены два отверстия, в которых соосно установлены электромагниты с втяжным якорем, ферромагнитные корпуса которых в виде чашек снабжены крышками, выполненными заодно с сердечниками катушек, установленных внутри корпусов и снабженных шунтирующими воротничками на плоских торцах упомянутых сердечников, обращенные в сторону пальцев донышки чашек имеют снабженные направляющими фасками центральные отверстия, являющиеся центрирующими элементами для двух ферромагнитных пальцев, снабженных фланцами с диаметрами, равными наружному диаметру корпусов электромагнитов, закрепленных на другой платформе, которые являются втяжными якорями упомянутых электромагнитов, один из пальцев выполнен цилиндрическим, другой палец, выполненный с поперечным сечением в форме ромба, имеет две продольные ленточки, являющиеся частями первоначальной наружной цилиндрической образующей пальца, расположенные в плоскости, проходящей через большую диагональ упомянутого ромба, перпендикулярную линии, проведенной через центры пальцев.
| Робототехнические системы в сборочном производстве | |||
| Под ред | |||
| Е.В | |||
| ПАШКОВА, Киев, Вища школа, 1987 | |||
| Устройство для стыковки сменного инструмента с кистью промышленного робота | 1986 |
|
SU1463412A1 |
| Устройство для стыковки сменного инструмента с кистью промышленного робота | 1985 |
|
SU1507563A1 |
| Стыковочное устройство | 1985 |
|
SU1301697A1 |
| Кисть манипулятора со стыковочным устройством | 1982 |
|
SU1304742A3 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| US 9815208 B2, 14.11.2017 | |||
| US 4710093 A, 01.12.1987. | |||

