Изобретение отноопся к электротехнике и может быть использовано в электроприводах с вентильньми элек- тродвигат елями.
Цель изобретения - повышение КПД электродвиг зтеля путем уменьшения потерь в последовательно соединенных ключах преобразователя частоты.
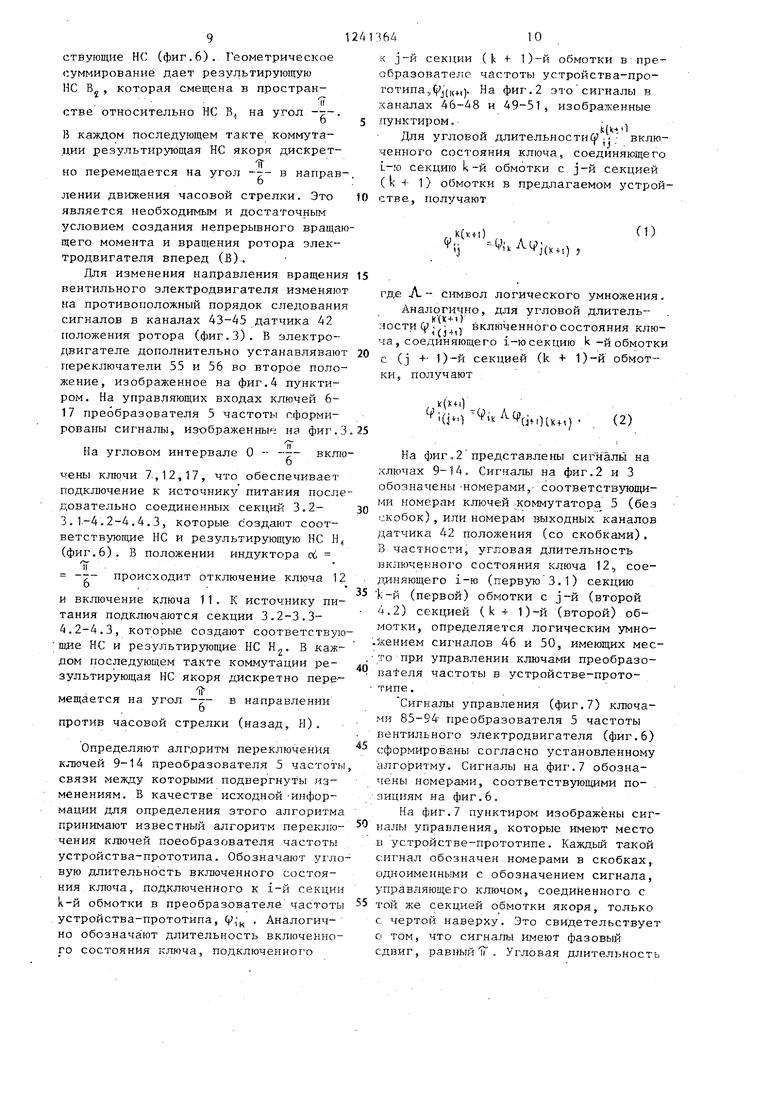
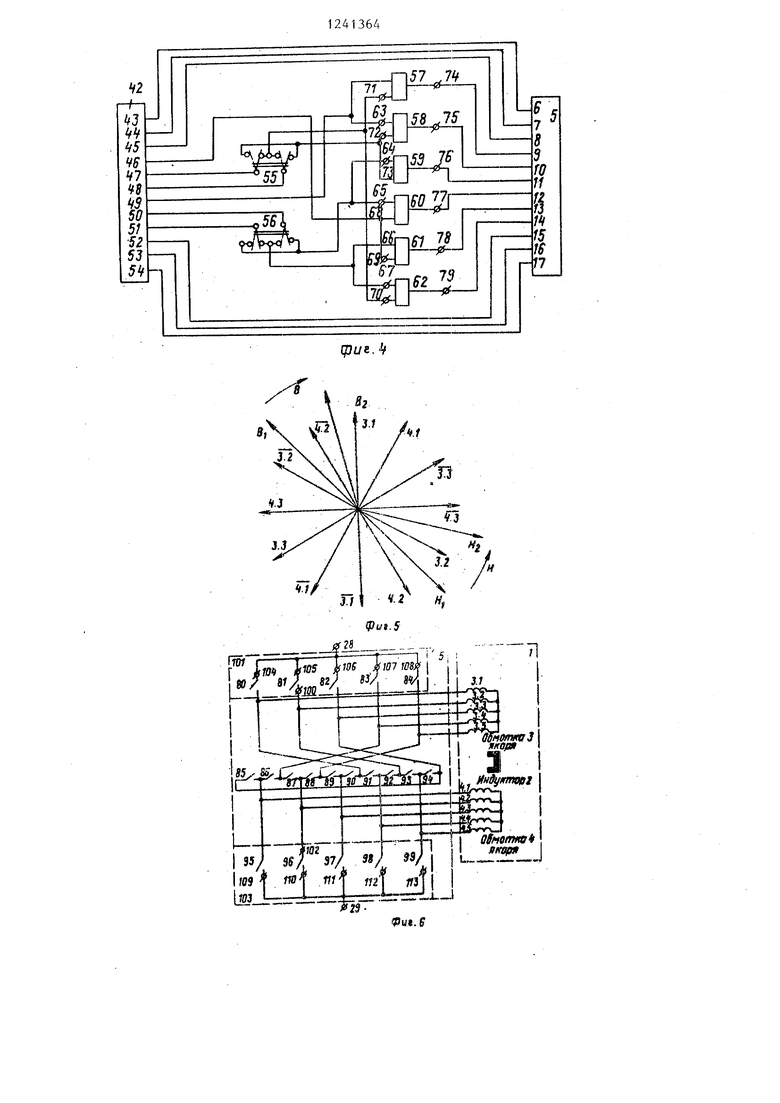
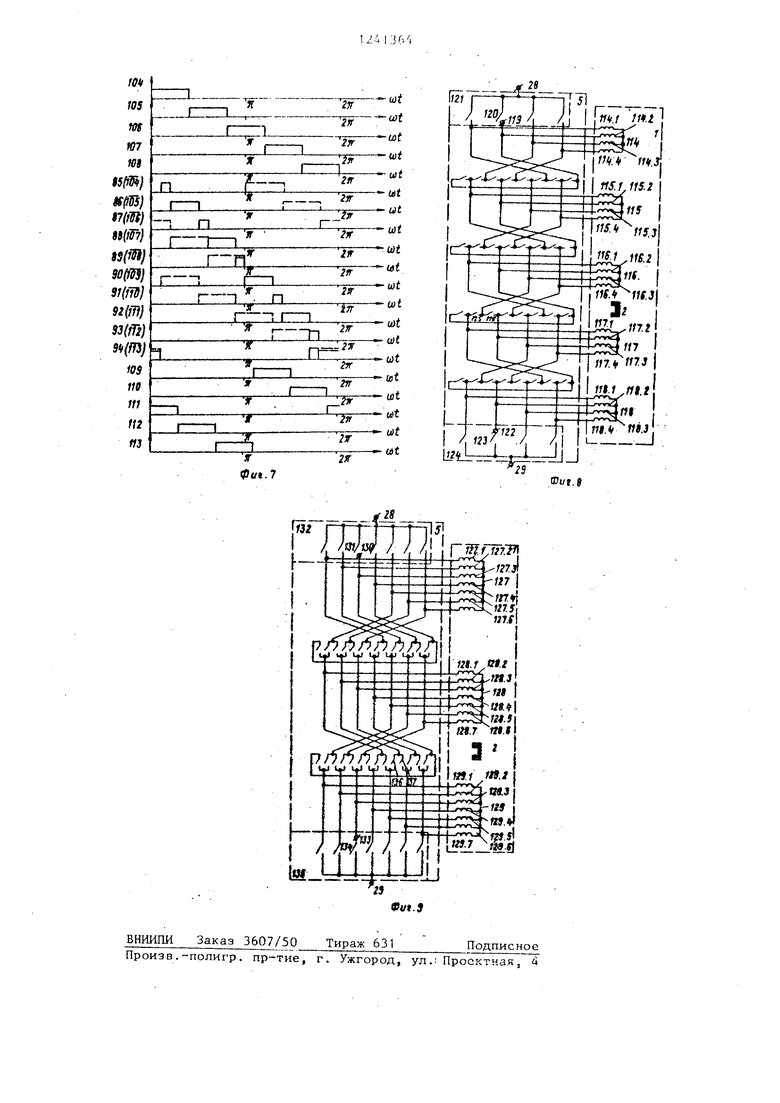
На фиг.1 изображена блок-схема вентильного электродвигателя с двумя трехсекционными обмотками якоря; н а фиг.2 и.3 - эпюры напряжений управляющих сигналов вентильного электродвигателя для, различных направлений/ вращения; на фиг.4 - блок-схема ре- венсора вентильного электродвигателя, управляемого по сигналам датчика положения ротора; на фиг.5 - условное изображение, пространственного расположения намагничивающих сш секций обмоток.якоря; на фиг.6 - блок-схема дентильного электродвигателя с двумя пятисекционными обмотками якоря; на фиг. 7 - эпюры напряжений управляю- пщх сигналов вентильного электродвигателя, ,изображенного на фиг.6; на фиг.8 - блок-схема вентильного электродвигателя с пятью четырехсекцион- иыми обмотками якоря; на фиг,9 - блок-схема вентильного электродвигателя с тремя семисекционными обмотками якоря.На фиг,1 показан один из вариантов вентильного электродвигателяj который содержит электромеханический преобразователь 1, имеющий индуктор 2 с числом пар полюсов р и якорь с п 2 обмотками 3 и 4 якоря, каждая из которых выполнена из П1. 3 секций 3.1, 3.2,,3..3 и 4.1, 4.2, 4.3, и преобразователь 5 частоты, собранный на 2-Ш П 12 управляемых ключах 6-17 , обмотки 3 и 4 якоря установлены одна относительно другой с фиксировaHHiiiM фазовым сдвигом, равным
ILiLlfeL m п р 6р
i-я секция, например 3.1 первой
раздельных вывода 28 и 29, служащих для подключения к источнику пнта ния „ Каждая i-я, например, первая 3.1 секция к-й (первой) обмотки якоря 5 соединена одним ключом 12 с j-й секцией 4.2, а другим 13 - с {j+1)-A секцией 4.3 п + 1 -и (второй) обмот- причем
-f.
к-и 4 якоря.
10
ecjni
15
20
25
30
35
40
J 1 +
L +
.
о
если
L +
m
-U 2 1 - (-I)
П1,
.
1- I - i- и
- единичная функция;
1, k - 1,2.,.(п-1), k 1. Если ключи выполнены в виде полностью управляемых ключей, то встречно-параллельно каждому ключу включены диоды 30-41.
Для обеспечения нормальной работы вентильного электродвигателя должен быть выбран алгоритм работы ключей преобразователя 5 частоты, отличаю- пщйся от алгоритма управления ключам преобразователя частоты известного устройства. Сигналы для управления ключами 6-17 преобразователя 5 часто ты могут быть сформированы из сигналов управления ключами преобразовате ля частоты известного устройства, или получены с помощью специального датчика положения ротора.
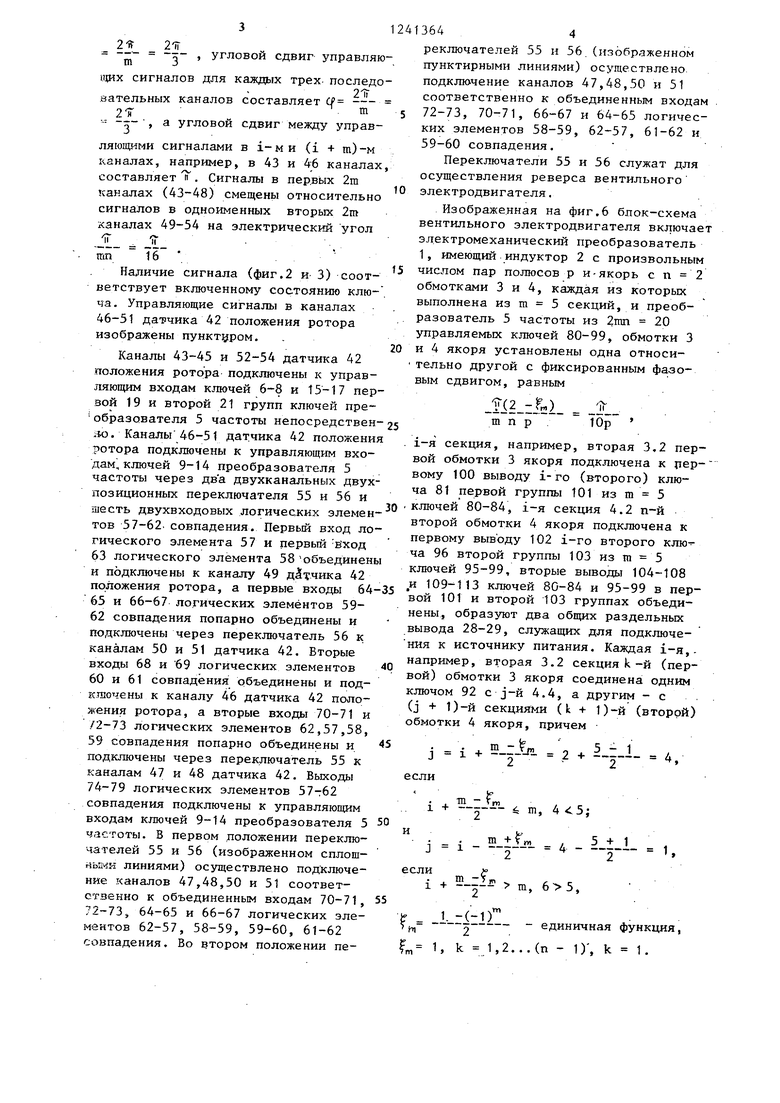
На фиг.4показан один из возможны примеров, реализации устройства управ ления вентильным электродвигателем, Устройство содержит источник управля щих сигналов, например, датчик 42 по ложения ротора, на 4 m (12-ти) выходах 43-51 которого сформирована последовательность управляющих сигналов
обмотки.3 якоря подключена к первому (фиг.2 и 3), обеспечивающая нормаль- выводу 1.3 ключа 6 первой группы 19 из m 3 ключей, i-я секция 4.1 г-й обмотки 4 якоря подключепа к первому выводу 20 i-ro ключа 15 второй группы 21 из m 3 ключей, вторые выводы 22-24 и 25-27 ключей 6-8 и 13-17 в первой 19 и второй 20 группах объединены, образуют два общих
ную работу вентильного электродвигат ля с преобразователем частоты. Обоз- качения сигналов (фиг.2,3,7) совпада ют с обозначением элементов, на кото 55 рых присутствуют эти сигналы.
Угловая длительность управляющего сигнала в каждом канале равна 9.
41364J
раздельных вывода 28 и 29, служащих для подключения к источнику пнта ния „ Каждая i-я, например, первая 3.1 секция к-й (первой) обмотки якоря 5 соединена одним ключом 12 с j-й секцией 4.2, а другим 13 - с {j+1)-A секцией 4.3 п + 1 -и (второй) обмот- причем
-f.
к-и 4 якоря.
10
J 1 +
о
ecjni
L +
.
если
L +
m
-U 2 1 - (-I)
П1,
.
1- I - i- и
- единичная функция;
1, k - 1,2.,.(п-1), k 1. Если ключи выполнены в виде полностью управляемых ключей, то встречно-параллельно каждому ключу включены диоды 30-41.
Для обеспечения нормальной работы вентильного электродвигателя должен быть выбран алгоритм работы ключей преобразователя 5 частоты, отличаю- пщйся от алгоритма управления ключами преобразователя частоты известного устройства. Сигналы для управления ключами 6-17 преобразователя 5 частоты могут быть сформированы из сигна- лов управления ключами преобразователя частоты известного устройства, или получены с помощью специального датчика положения ротора.
На фиг.4показан один из возможных примеров, реализации устройства управления вентильным электродвигателем, Устройство содержит источник управляющих сигналов, например, датчик 42 положения ротора, на 4 m (12-ти) выходах 43-51 которого сформирована последовательность управляющих сигналов.
(фиг.2 и 3), обеспечивающая нормаль-
ную работу вентильного электродвигателя с преобразователем частоты. Обоз- качения сигналов (фиг.2,3,7) совпадают с обозначением элементов, на кото- 55 рых присутствуют эти сигналы.
Угловая длительность управляющего сигнала в каждом канале равна 9.
3
2 й- 2 ir
-т- , угловой сдвиг управляюm J
цдих сигналов для каждых трех- последо,0 21Г вательных каналов составляет
2Т
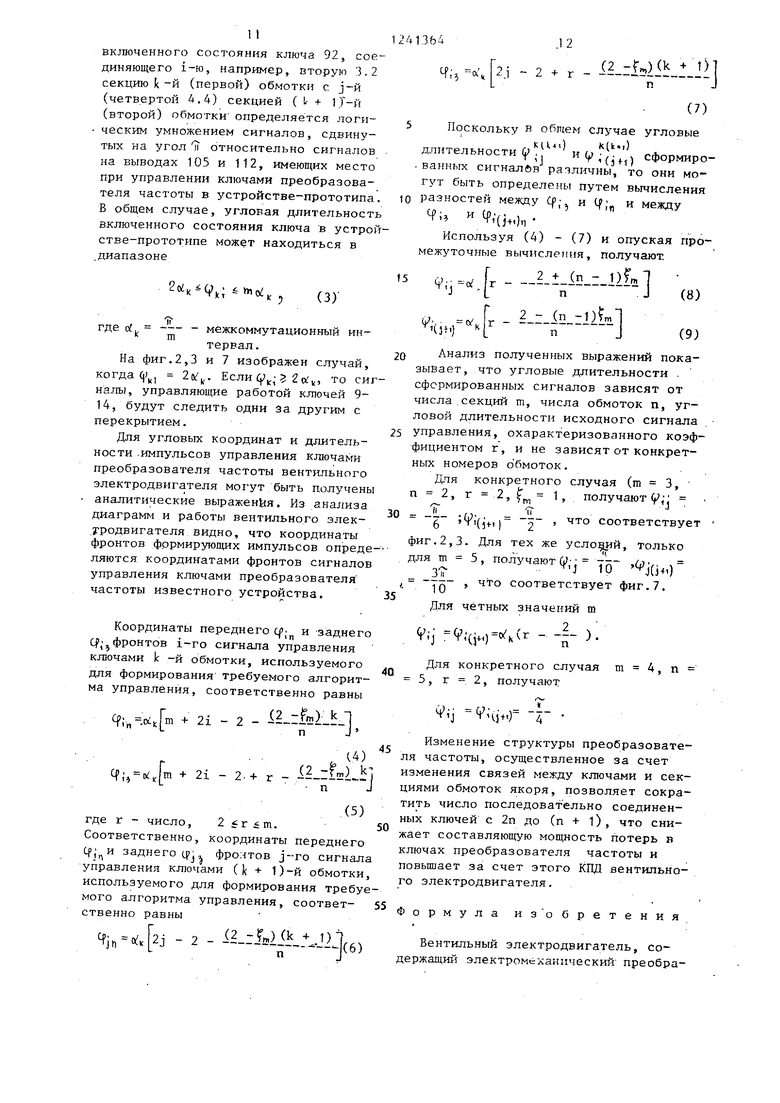
- о- , а угловой сдвиг между управляющими сигналами в i-ми (i + т)-м каналах, например, в 43 и 46 каналах, составляет Т. Сигналы в первых 2т каналах (43-48) смещены относительно сигналов в одноименных вторых 2т каналах 49-54 на электрический угол
ran 16
Наличие сигнала (фиг.2 и- 3) соответствует включенному состоянию клю- ча. Управляющие сигналы в каналах 46-51 да-рчика 42 положения ротора изображены пунктцром.
Каналы 43-43 и 52-54 датчика 42 положения ротора подключены к управляющим входам ключей 6-8 и 15-17 первой 19 и второй 21 групп ключей пре- образователя 5 частоты непосредствен ю. Каналы 46-51 датчика 42 положения ротора подключены к управляющим входам, ключей 9-14 преобразователя 5 частоты через два двухканальных двухпозиционных переключателя 55 и 56 и гаесть двухвходовых логических элементов 57-62. совпадения. Первьш вход логического элемента 57 и первый в ход 63 логического элемента 58 объединены и подключены к каналу 49 датчика 42 положения ротора, а первые входы 6465 и 66-67 логических элементов 59- 62 совпадения попарно объединены и подключены через переключатель 56 к каналам 50 и 51 датчика 42. Вторые входы 68 и 69 логических элементов 60 и 61 совпадения объединены и подключены к каналу 46 датчика 42 положения ротора, а вторые входы 70-71 и /2-73 логических элементов 62,57,58, 59 совпадения попарно объединены и подключены через переключатель 55 к каналам 47 и 48 датчика 42. Выходы 74-79 логических элементов 57-г62 совпадения подключены к управляющим входам ключей 9-14 преобразователя 5 частоты. В первом положении переключателей 55 и 56 (изображенном сплош- ньЕчк линиями) осуществлено подключение каналов 47,48,50 и 51 соответственно к объединенным входам 70-71, 72-73, 64-65 и 66-67 логических элементов 62-57, 58-59, 59-60, 61-62 совпадения. Во втором положении пе
13644
реключателей 55 и 56.(изображенном пунктирными линиями) осуществлено подключение каналов 47,48,50 и 51 соответственно к объединенным входам 72-73, 70-71, 66-67 и 64-65 логических элементов 58-59, 62-57, 61-62 и 59-60 совпадения.
Переключатели 55 и 56 служат для осуществления реверса вентильного электродвигателя.
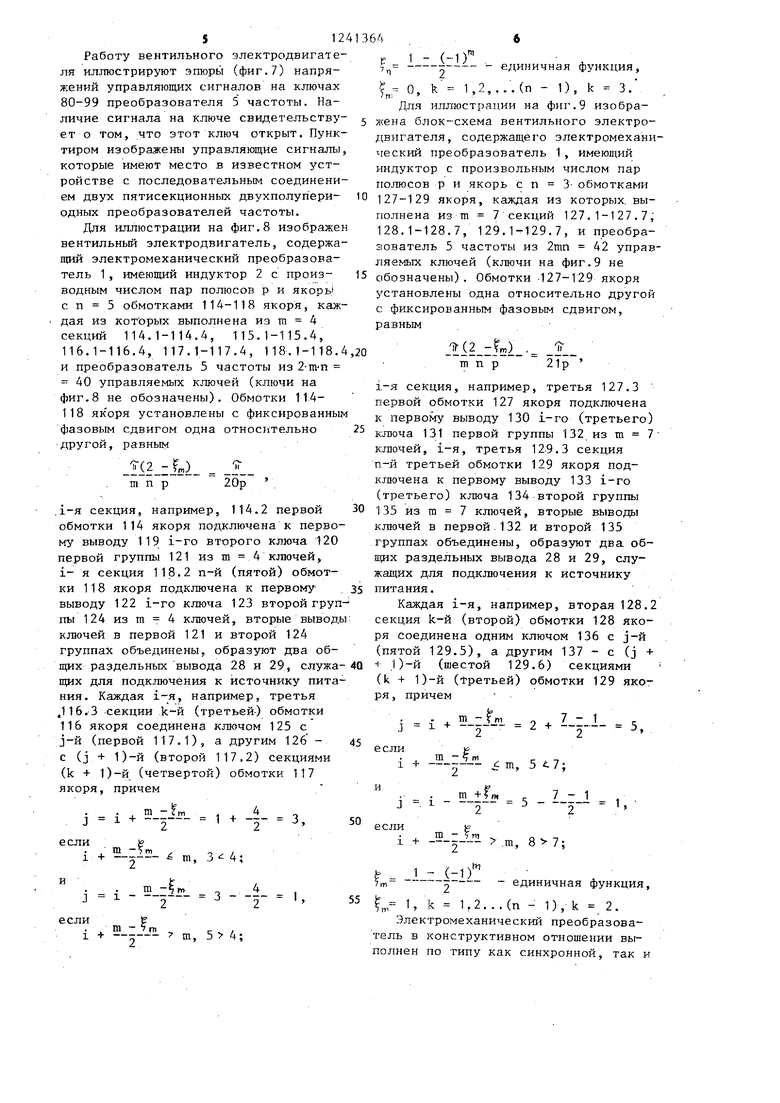
Изображенная на фиг.6 блок-схема вентильного электродвигателя включает электромеханический преобразователь 1, имеющий индуктор 2 с произвольным числом пар полюсов р и-якорь с п 2 обмотками 3 и 4, каждая из которых выполнена из m 5 секций, и преобразователь 5 частоты из 2inn 20 управляемых ключей 80-99, обмотки 3 и 4 якоря установлены одна относи- тельно другой с фиксированным фазовым сдвигом, равным
. :
m п р . Юр
i-я секция, например, вторая 3.2 первой обмотки 3 якоря подключена к pep- вому 100 выводу i-го (второго) ключа 81 первой группы 101 из m 5 ключей 80-84, i-я секция 4.2 п-й второй обмотки 4 якоря подключена к первому выводу 102 i-ro второго ключа 96 второй группы 103 из m 5 ключей 95-99, вторые выводы 104-108 .и 109-113 ключей 80-84 и 95-99 в первой 101 и второй 103 группах объединены, образуют два общих раздельных вывода 28-29, служащих для подключе- ння к источнику питания. Каждая i-я,. например, вторая 3.2 секцияk-и (первой) обмотки 3 якоря соединена одним ключом 92 с j-й 4.4, а другим - с (J + 1)-й секциями (k + 1)-й (второй) обмотки 4 якоря, причем
j 2 + .1. . 4,
если
ш, 4 С 5 J
/ 5 + 1 . 4 1,
1 +
m
m, 6 5,
f - .I rllll hi 2
„ 1, k 1,2...(n - 1), k 1.
- единичная функция,
Работу вентильного электродвигателя иллюстрируют эгпоры (фиг. 7) напряжений управляющих сигналов на ключах 80-99 преобразователя 5 частоты. Наличие сигнала на ключе свидетельству- ет о том, что этот ключ открыт. Пунктиром изображены управляющие сигналы которые имеют место в известном устройстве с последовательным соединением двух пятисекционных двухполуп ери- одных преобразователей частоты.
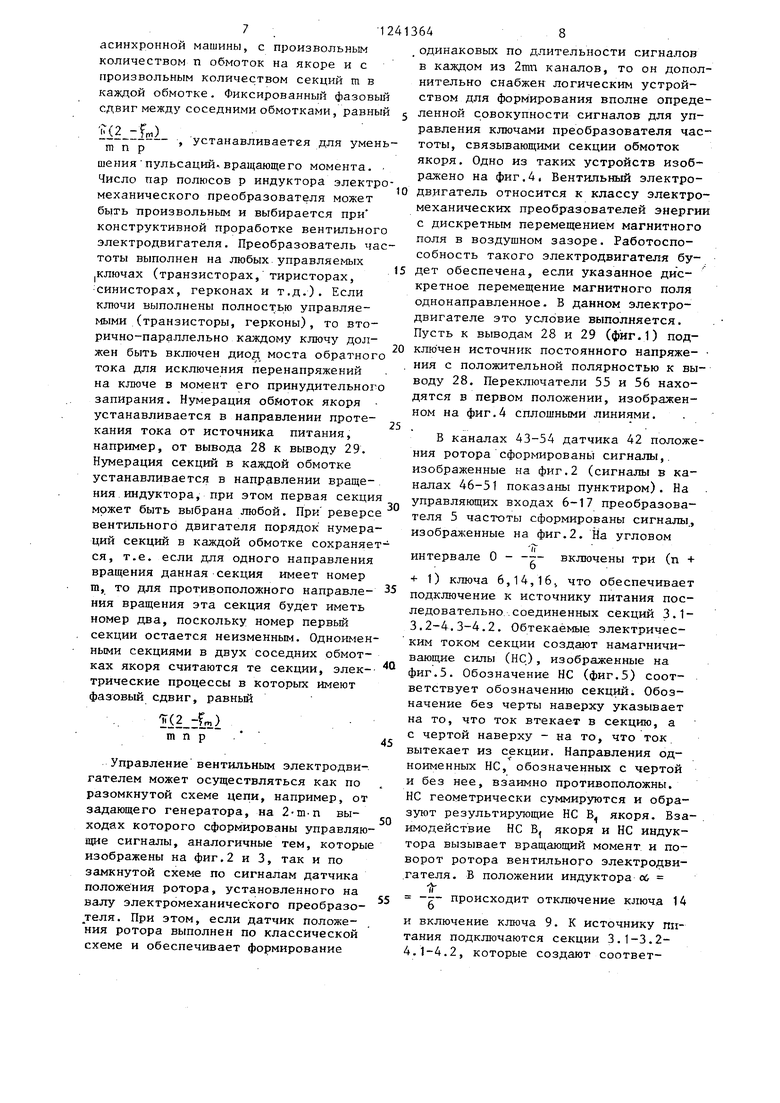
Для иллюстрации на фиг.8 изображен вентильный электродвигатель, содержащий электромеханический преобразователь 1, имеющий индуктор 2 с произ- водным числом пар полюсов р и якорь с п 5 обмотками 114-118 якоря, каждая из кот орых выполнена из m 4 секций 114.1-114.4, 115.1-115.4, 116.1-116.4, 117.1-117.4, 118.1-118.4 и преобразователь 5 частоты из 2-т П 40 управляемых ключей (ключи на фиг.8 не обозначены). Обмотки 114- t18 як оря установлены с фиксированным фазовым сдвигом одна относительно другой, равным
1( - m п р 20р ;
,1-я секция, например, 114.2 первой обмотки 114 якоря подключена к первому выводу 119 i-ro второго ключа 120 первой группы 121 из m 4 ключей, i- я секция 118.2 п-й (пятой) обмотки 118 якоря подключена к первому . выводу 122 i-ro ключа 123 второй груп пы 124 из га 4 ключей, вторые выводы ключей в первой 121 и второй 124 группах объединены, образуют два общих раздельных вывода 28 и 29, служащих для подключения к источнику питания. Каждая i-я, например, третья ,116.3 секции k-й (третьей-) обмотки 116 якоря соединена ключом 125 с j-й (первой 117.1), а другим 126 - с (J + 1)-й (второй 117.2) секциями (k 1)-й (четвертой) обмотки 117 якоря, причем
i +
m
-r.
1 + 3,
50
если
L ™ / о /
1 + -T; m,
- т - - -3 - I J - 1 - -2 -32
55
+
m
,
т, 5 4;
- (-1)
- единичная функция.
- О, k 1,2,./. (п - 1), k 3.
Для иллюстрации на фиг.9 изображена блок-схема вентильного электродвигателя, содержащего электромеханический преобразователь 1, имеющий индуктор с произвольным числом пар полюсов р и якорь с п 3- обмотками 127-129 якоря, каждая из которых, выполнена из m 7 секций 127.1-127.7, 128.1-128.7, 129.1-129.7, и преобразователь 5 частоты из 2тп 42 управляемых ключей (ключи на фиг.9 не обозначены). Обмотки -127-129 якоря установлены одна относительно другой с фиксированным фазовым сдвигом, равным
,L :Lm п р 21р
i-я секция, например, третья 127.3 первой обмотки 127 якоря подключена к первому выводу 130 i-ro (третьего) ключа 131 первой группы 132 из m 7 ключей, i-я, третья 12-9.3 секция п-й третьей обмотки 129 якоря подключена к первому выводу 133 i-ro (третьего) ключа 134 второй группы 135 из m 7 ключей, вторые выводы ключей в первой 132 и второй 135 группах объединены, образуют два общих раздельных вывода 28 и 29, служащих для подключения к источнику питания.
Каждая i-я, например, вторая 128.2 секция k-й (второй) обмотки 128 якоря соединена одн:им ключом 136 с j-й (пятой 129.5), а другим 137 - с (j + + 1)-й (шестой 129.6) секциями (k + 1)-й (третьей) обмотки 129 якоря, причем
j i . П.: 2 . Ц-i- 5,
если
m - m .. , 1 .- т,
V i - E-lf - 5 - - 1 J - J- 2 - 2
если
i + .m,
r -1 )
m --
tn
2 - единичная функция,
„ 1, k П2...(п - 1), k 2.
Электромеханический преобразователь в конструктивном отношении выполнен по типу как синхронной, так и
, устанавливаетея для умень
7 1
асинхронной машины, с произвольным количеством п обмоток на якоре и с произвольным количеством секций m в каждой обмотке, Фиксированный фазовьш сдвиг между соседними обмотками, равный
) m П р
шения пульсаций вращающего момента. . Число пар полюсов р индуктора электро механического преобразователя может быть произвольным и выбирается при конструктивной проработке вентильного электродвигателя. Преобразователь частоты выполнен на любых управляемых |Ключах (транзисторах, тиристорах, синисторах, герконах и т.д.). Если ключи выполнены полностью управляемыми (транзисторы, герконы), то вторично-параллельно каждому ключу должен быть включен диод моста обратного тока для исключения перенапряжений на ключе в момент его принудительного запирания. Нумерация обмоток якоря - устанавливается в направлении протекания тока от источника питания, например, от вывода 28 к выводу 29. Нумерация секций в каждой обмотке устанавливается в направлении вращения индуктора, при этом первая секция может быть выбрана любой. При реверсе вентильного двигателя порядок нумераций секций в каждой обмотке сохраняется, т.е. если для одного направления вращения данная секция имеет номер т, то для противоположного направле- ния вращения эта секция будет иметь номер два, поскольку номер первый секции остается неизменным. Одноимен- ньгми секциями в двух соседних обмотках якоря считаются те секции, элек- трические процессы в которых имеют фазовый сдвиг, равньм
)
m п р .
Управление вентильным электродвигателем может осуществляться как по разомкнутой схеме цепи, например, от задающего генератора, на 2 т-п выходах которого сформированы управляющие сигналы, аналогичные тем, которые изображены на фиг.2 и 3, так и по замкнутой схеме по сигналам датчика положения ротора, установленного на валу электромеханического преобразо- теля. При этом, если датчик положения ротора выполнен по классической схеме и обеспечивает формирование
10
15
20
25
41
5
5
30
0
5
3648
одинаковых по длительности сигналов в каждом из 2mn каналов, то он дополнительно снабжен логическим устройством для формирования вполне определенной совокупности сигналов для управления ключами преобразователя частоты, связывающими секции обмоток якоря. Одно из таких устройств изображено на фиг.4. Вентильный электродвигатель относится к классу электромеханических преобразователей энергии с дискретным перемещением магнитного поля в воздушном зазоре. Работоспособность такого электродвигателя будет обеспечена, если указанное дискретное перемещение магнитного поля однонаправленное. В данном электродвигателе это условие выполняется. Пусть к выводам 28 и 29 (фиг.1) подключен источник постоянного напряже- ния с положительной полярностью к выводу 28. Переключатели 55 и 56 находятся в первом положении, изображенном на фиг.4 сплошными линиями.
В каналах 43-54 датчика 42 положения ротора сформированы сигналы,, изображенные на фиг.2 (сигналы в каналах 46-51 показаны пунктиром). На управляющих входах 6-17 преобразователя 5 частоты сформированы сигналы., изображенные на фиг.2. На угловом
(Г .
интервале О - --- включены три (п + о
+ 1) ключа 6,14,16 что обеспечивает подключение к источнику питания последовательно .соединенных секций 3.1- 3.2-4.3-4.2. Обтекаемые электрическим током секции создают намагничивающие силы (НС), изображенные на фиг.5. Обозначение НС (фиг.5) соответствует обозначению секций. Обозначение без черты наверху указывает на то, что ток втекает в секцию, а с чертой наверху - на то, что ток. вытекает из секцииг. Направления одноименных НС, обозначенных с чертой и без нее, взаимно противоположны. НС геометрически суммируются и образуют результирующие НС В якоря. Взаимодействие НС В, якоря и НС индуктора вызывает вращающий момент и поворот ротора вентильного электродви- .гателя. В положении индуктора сб
--- происходит отключение ключ.а 14 о
и включение ключа 9. К источнику питания подключаются секции 3.1-3.2- 4.1-4.2, которые создают соответствующие НС (фиг.6). Геометрическое суммирование дает результирующую НС В которая смещена в простран I
стве относительно НС В, на угол -г-li каждом последующем такте коммутации результирующая НС якоря дискрет1Г
но перемещается на угол -т в напрево
лении движения часовой стрелки. Это является необходимым и достаточным условием создания непрерывного вращающего момента и вращения ротора электродвигателя вперед (В),
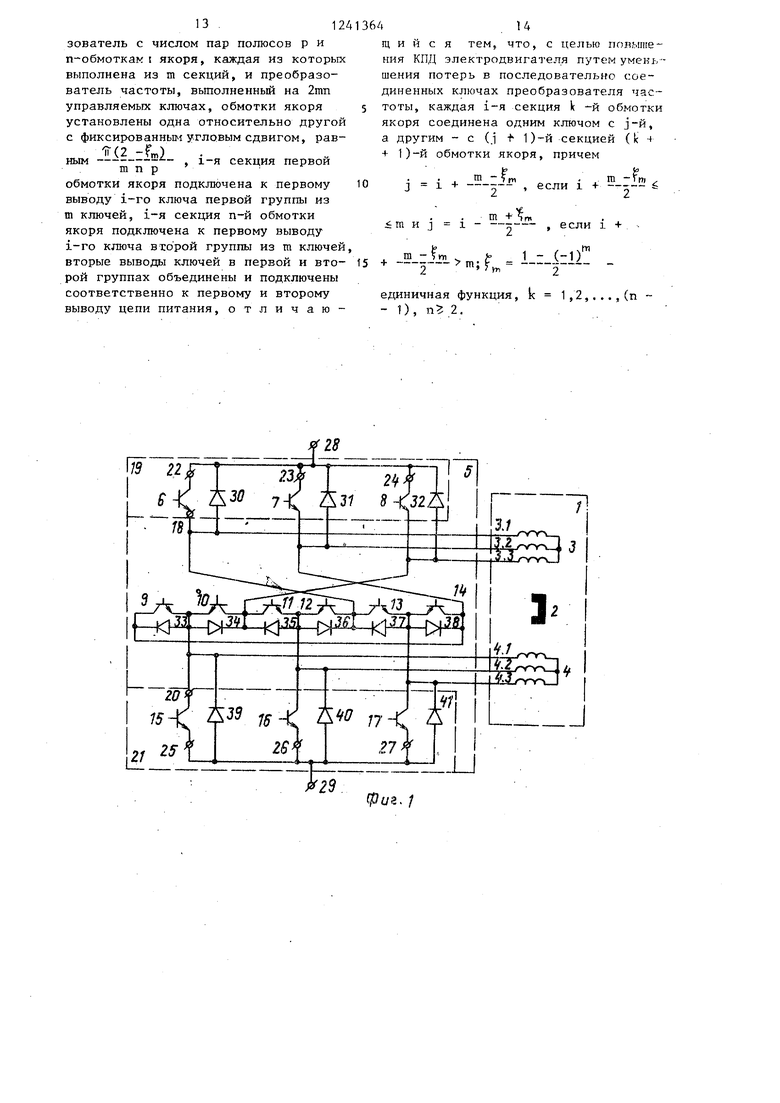
Для изменения направления вращения вентильного электродвигателя изменяют на противоположный порядок следования сигналов в каналах 43-45 датчика 42 Положения ротора (фиг.З). В электродвигателе дополнительно устанавлявают переключатели 55 и 56 во второе положение, изображенное на фиг.4 пунктиром. На управляющих входах ключей 6- 17 преобразователя 5 частоты сформированы сигналы, изображенные нэ фиг.3
„/л
На угловом интервале О - -- вклюо
чены ключи 7., 12,17, что обеспечивает подк1Почение к источнику питания последовательно соединенных секций 3,2- 3.1-4.2-4.4.3, которые создают соответствующие НС и результирующую НС Н (фиг.6). В положении индуктора об
--- происходит отключение ключа 12 о , , .
и включение ключа 11. К источнику питания подключаются секции 3.2-3.3- 4.2-4.3, которые создают соответствующие НС и результирующие НС Н. В каждом последующем такте коммутации ре- зультирующая НС якоря дискретно переIf
мещается на угол -т- в направлении о
против часовой стрелки (назад, Н),
Определяют алг.оритм переключения ключей 9-14 преобразователя 5 частоты связи между которыми подвергнуты изменениям. В качестве исходной-информации для определения этого алгоритма
„
принимают известный алгоритм переклю- чения ключей поеобразователя частоты устройства-прототипа. Обозначают уг ло вую длительность включенного состояния ключа, подключенного к i-й секции k-й обмотки в преобразователе частоты . устройства-прототипа, Vi k Аналогично обознача ют длительность включенного состояния ключа, подключенног о
к j-й секции ( k -I- 1)-й обмотки в преобразователе частоты устройства-прототипа .,9j(nt,. На фиг.2 это сигналы в каналах 46-48 и 49-51, изображенные пунктиром, Для угловой длительности( j .; включенного состояния ключа, соединяющего 1-ю секцию k-й обмотки с j-й секцией ( + 1) обмотки в предлагаемом устройстве, получают
,. 1(: + ) ,, .
--Ф,чАф
(1)
J(X + I) J
где А- символ логического умножения. Аналогично, для угловой длительК () + О нести ,, включенного состояния ключа, соединяющего i-ю секцию k -и обмотки с (J + 1)-й секцией (k + 1)-й обмотки, получают
t(V+i)
..Ou.,)(2)
На фиг.,2 представлены сиг налы на ключах 9-14. Сигналы на фиг.2 и 3 обозначены -номерами,- соответствзпощи- ми номерам ключей коммутатора 5 (без скобок), или номерам выходных каналов датчика 42 положения (со скобками). В частности, угловая длительность включенного состояния ключа 12,, соединяющего i-ю (первую 3.1) секцию k-й (первой) обмотки с j-й (второй 4.2) секцией ( k - 1)-й (второй) обмотки, определяется логическим умно- кением сигналов 46 и 50, имеющих место при управлении ключами преобразо- ваФеля частоты в устройстве-прототипе .
Сигналы управления (фиг.7) ключами 85-94 преобразователя 5 частоты вентильного электродвигателя (фиг.6) сформированы согласно установленному алгоритму. Сигналы на фиг.7 обозначены номерами, соответствующими позициям на фиг.6.
На фиг.7 пунктиром изображены сигналы управления, которые имеют место в устройстве-прототипе. Каждый такой сигнал обозначен номерами в скобках,, одноименными с обозначением сигнала, управляющего ключом, соединенного с той. же секцией обмотки якоря, только с чертой наверху. Это свидетельствует о том, что сигна.пь1 имеют фазовый сдвиг, равньгй1Г. Угловая длительность
11
включенного состояния ключа 92, соединяющего i-ю, например, вторую 3,2 секцию k-и (первой) обмотки с j-й (четвертой 4.4) секцией ( + lj-й (второй) обмотки определяется логическим умножением сигналов, сдвинутых на угол 7 относительно сигналов на выводах 105 и 112, имеющих место при управлении ключами преобразователя частоты в устройстве-прототипа. В общем случае, угловая длительность включенного состояния ключа в устройстве-прототипе может находиться в .диапазоне
2ы, 6 то/
(3)
где 0., межкоммутационныи ин m
тервал.
На фиг.2,3 и 7 изображен случай, когда ( . Если (,- , то сиг- на.пъ), управляющие работой ключей 9- 14, будут следить одни за другим с перекрытием.
Для угловых координат и длительности .импульсов управления ключами преобразователя частоты вентильного электродвигателя могут быть получены аналитические выражения. Из анализа диаграмм и работы вентильного электродвигателя видно, что координаты фронтов Формирующих импульсов определяются координатами фронтов сигналов управления ключами преобразователя частоты известного устройства.
Координаты переднего q ; и -заднего СС, фронтов i-ro сигнала управления к.пючами 1с -и обмотки, используемого для формирования требуемого алгоритма управления, соответственно равны
9;„.... . 2i - 2 - (.,
m + 21 - 2. -f- г . (2 -L) k
п
(5)
где г - число, 2 .
Соответственно, координаты переднего заднего cpj фролтов j--ro сигнала управления ключами ()( 1)-й обмотки, используемого для формирования требуе мого алгоритма управления, соответственно равны
Cf - Г21 - 2 - i2 -irjCk .1)T. jn Jn 4(6)
1241364
.12
СР. -. hi -. 2 /г - (k О Cf,-a,U,l 2 -f г -J
(7)
Поскольку в обтем случае угловые
, mU ) к(ьч)
длительности ( . V , (j ,) сформиро- ванных сигналбв различны, то они могут быть определены путем вычисления разностей между Cf;, и Cf; и между
i5 (ji.)n
Используя (4) - (7) и опуская промежуточные вычисления, получают.
,,,.,,,,)f
п
(8)
V,
г - )m П J
(9)
Анализ полученных выражений показывает, что угловые длительности . сформированных сигналов зависят от числа секций т, числа обмоток п, угловой длительности исходного сигнала управления, охарактеризованного коэффициентом г, и не зависят от конкретных номеров о бмоток.
Для конкретного случая (т 3, п 2, г 2,(1, получают V;
--- ;(jP,V . --- , что соответствует
фиг.2,3. Для тех же условий, только для 5, по.лучают (f,-j j p- j(j,) -7й ЧТО соответствует фиг.7. Для четных значений m
9;i -9,(r - - ).
J
n
40
Для конкретного случая m А, п 5, г , 2, получают
V j Уч1+ Г 4
45
0
5
Изменение структуры преобразователя частоты, осуществленное за счет изменения связей между ключами и секциями обмоток якоря, позволяет сократить число последовательно соединенных ключей с 2п до (п + 1), что снижает составляющую мощность потерь в ключах преобразователя частоты и повьпиает за счет этого КПД вентильного электродвигателя.
Формула из обретения
Вентильный электродвигатель, содержащий электромеханический преобра13 ,124 зователь с числом пар полюсов р и п-обмоткак I якоря, каждая из которых выполнена из m секций, и преобразователь частоты, вьтолненньм на 2mn управляемых ключах, обмотки якоря установлены одна относительно другой с фиксированным угловым сдвигом, равным , i-я секция первой
m п р
обмотки якоря подключена к первому выводу i-ro ключа первой группы из m ключей, i-я секция п-й обмотки якоря подключена к первому выводу i-ro ключа второй группы из m ключей вторые выводы ключей в первой и второй группах объединены и подключены соответственно к первому и второму выводу цепи питания, отличаю3641 4
щ и и с я тем, что, с целью повыше ния КПД электродвигателя путем уменьшения потерь в последовательно соединенных ключах преобразователя час- 5 тоты, каждая i-я секция k й обмотки якоря соединена одним ключом с j-й, а другим - с (J f 1)-й секцией (t -+ + 1)-й обмотки якоря, причем
m -fp, .-
0
1 +
. . m -ftn .- если 1 + -j- fc
i m и j 1
m +
если 1 +
m I-
2 m 2
единичная функция, k 1,2,...,(n -- - 1), n 2.
, ,.f ):
+ т ,у„- о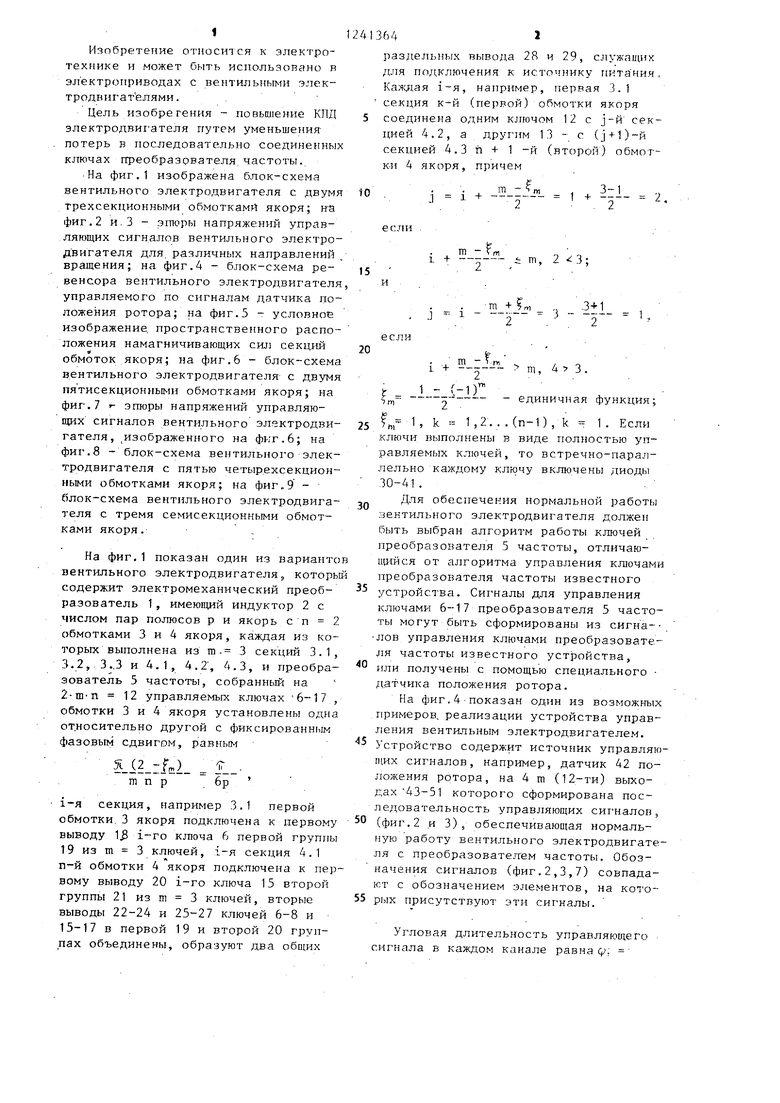
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1985 |
|
SU1309241A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Вентильный электродвигатель | 1983 |
|
SU1091281A1 |
| Вентильный электродвигатель | 1983 |
|
SU1269236A1 |
| Способ управления вентильным электродвигателем в режиме стопорения ротора | 1985 |
|
SU1300616A1 |
| Вентильный электродвигатель | 1984 |
|
SU1325630A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |
| Вентильный электродвигатель | 1986 |
|
SU1372575A2 |
| Вентильный электродвигатель | 1989 |
|
SU1677839A2 |
| Вентильный электродвигатель | 1990 |
|
SU1771056A1 |
Изобретение относится к электроприводам с вентильными электродвигателями. Цель изобретения - повышение КПД за счет снижения потерь в последовательно соединенных ключах преобразователя частоты. Электродвигатель содержит электромеханический преобразователь с числом пар полюсов Р и п обмотками якоря, каждая из которых выполнена из m секций, и преобразователь частоты, выполненный на 2 m п управляемых ключах. Обмотки якоря установлены одна относительно другой с фиксированным угловым сдвигом, равным (2- га)/mpn, i-я секция первой обмотки якоря подключена к первому выводу i-ro ключа первой группы из m кггючей, i-я секция п-й обмотки якоря подключена к первому выводу i-ro ключа второй группы из m ключей, вторые выводы ключей в первой и второй группах объединены и подключены, соответственно, к первому и второму выводу цепи питания. Каждая i-я секция k-й обмотки якоря соединена одним ключом с j-й, а другим - с (j + 1)-й секциями (k + 1)-й обмотки якоря. Изменение структуры преобразователя частоты, осуществленное за счет изменения связей между ключами и секциями обмоток якоря, позволяет сократить число последовательно соединенных ключей с 2 до (п + 1). Это снижает составляющую мощности потерь в ключах преобразователя и повьшает КПД двигателя. 9 ил. о (О со с:
TT/j. lirj f7r/3 SJT/J фиг.2
W
7/V«J 8(fS)
) W(7) 1Ф8
1Щ .13150}
itisi
15(52) 16(53)
nlsif
us.3
ZJT
.r н,
Лт
b
l lm lf10S |Й7Ш;| | ,e2; W; l.j
1ЖЗ Ь:ггв
OS |Й7Ш;| | W; l.j
i 5,
./
.L
I / Ш/ ./A,
ut.S
СДР
r77Jff «7
lil
ВНИИПИ Заказ 3607/50 Тираж 631
Подписное
Произв.-полигр. пр-тне, г. Ужгород, ул.; ПроектнаяГ
Подписное
ектнаяГ
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильные двигатели и их применение на электропрдвижном составе./Под ред.Тихменева Б.И., М.: Транспорт, 1976, с.50. | |||
