Изобретение относится к электротехнике и может быть использовано в электроприводе с вентильным электродвигателем ,
Цель изобретения - повьпнение энергетических показателей вентильного электродвигателя в режиме стопорения ротора.
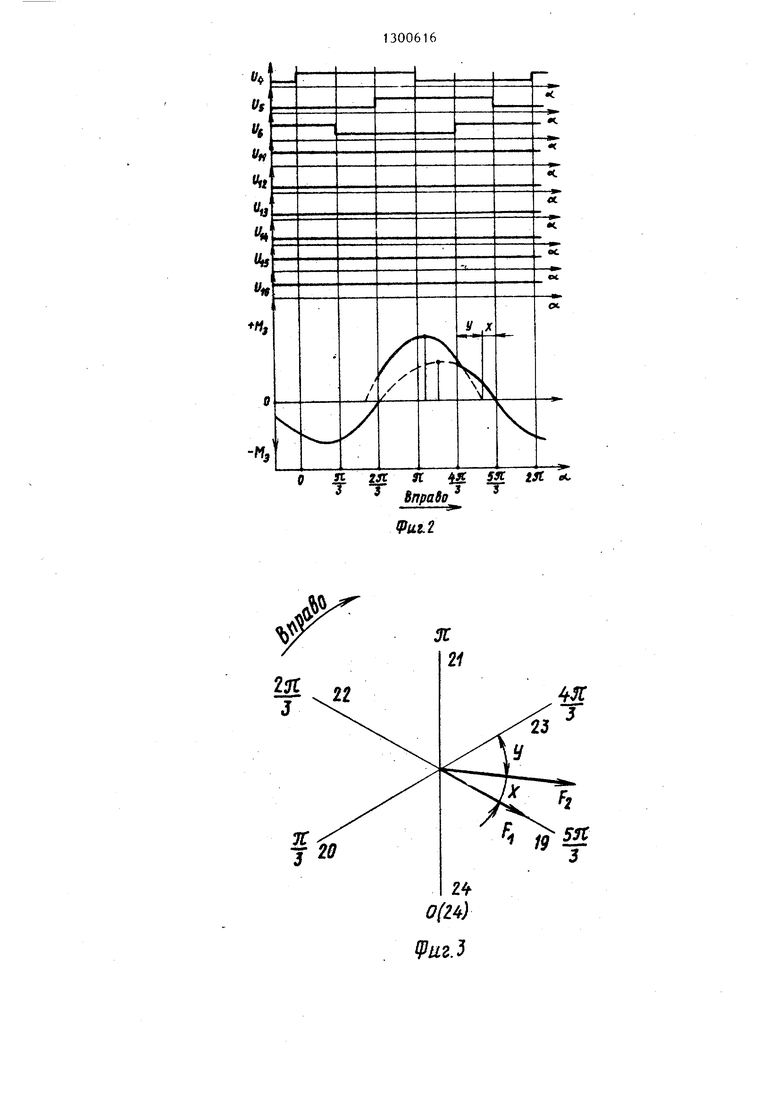
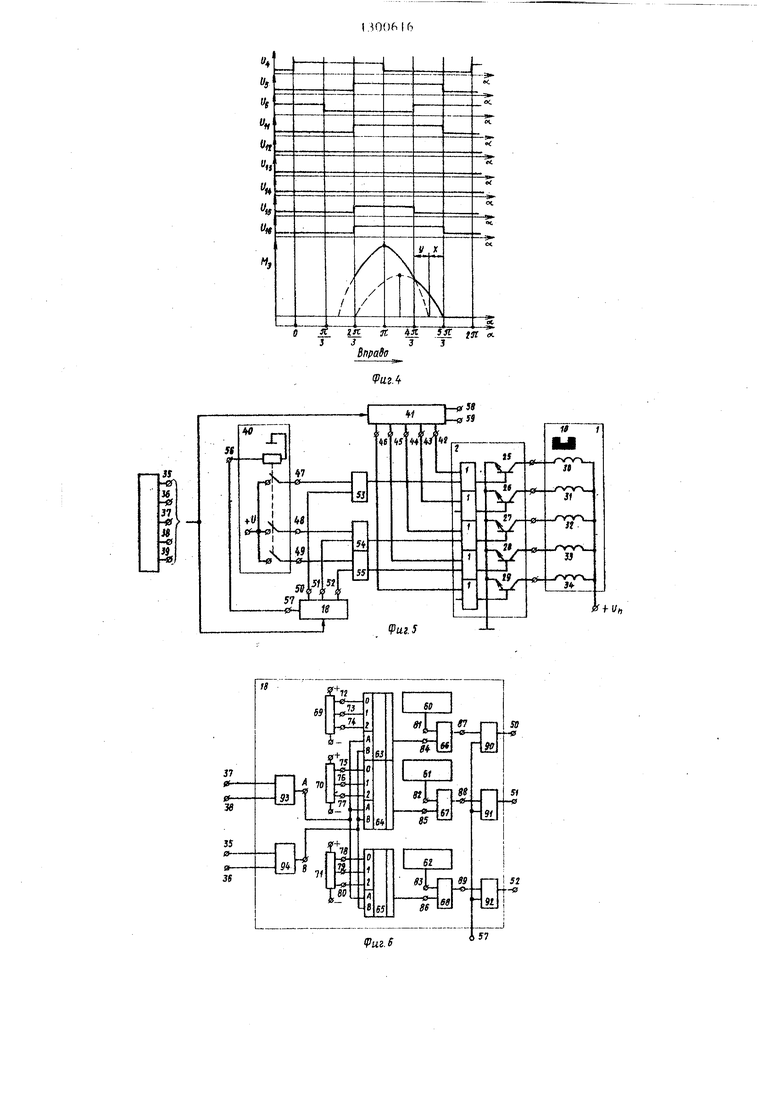
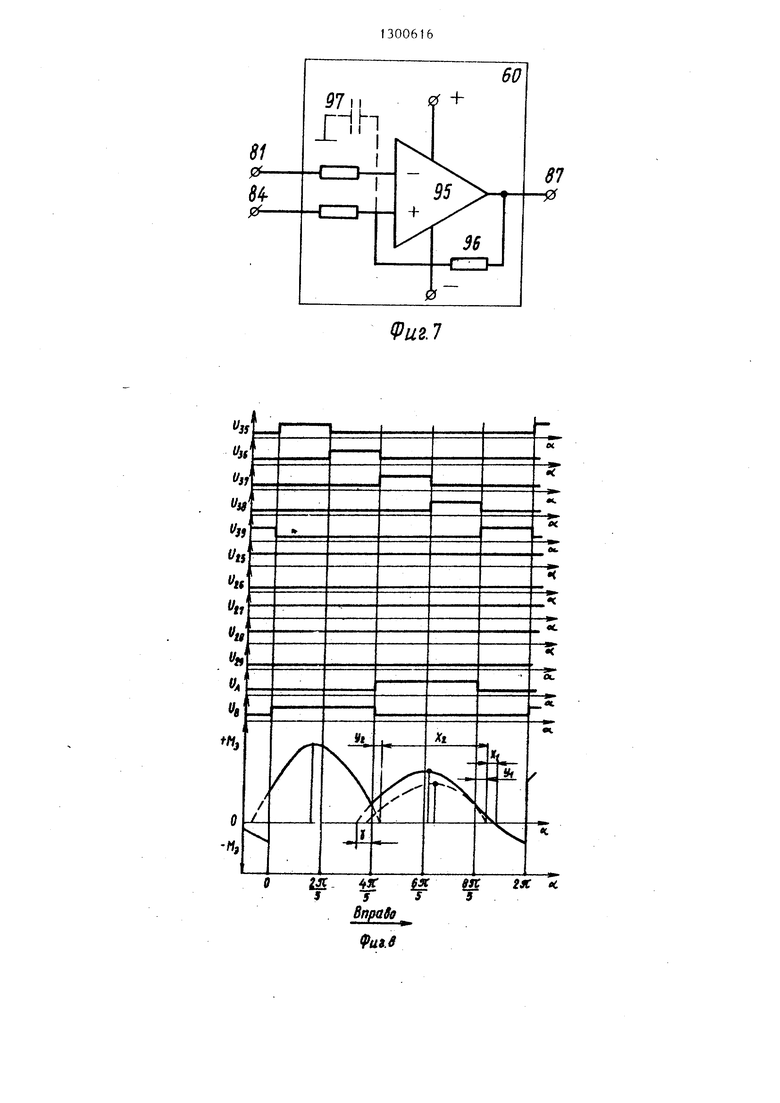
На фиг.1 представлена блок-схема трехсекционного вентильного электродвигателя J на фиг.2 - эпюры напряжений в узлах блок-схемы трехсекционного вентильного электродвигателя и его моментные характеристики; на фиг.З - векторая диаграмма намагничивающих сил, создаваемых секциями обмотки якоря трехсекционного вентильного электродвигателя,на фиг,4 - эпюры напряжений и моментные характеристики трехсекционного вентильного электродвигателя для частного случая способа управления5 на фиг.З - блок-схема пятисекционного вентильного электродвигателя, на фиг, 6 - блоксхема генератора импульсов регулируемой скважности, на фиг.7 - блок-схема гистерезисного реле; на фиг.8 - эпюры напряжений в узлах блок-схемы пятисекционного вентильного электродвигателя и его моментные характеристики j на фиг.9 - векторная диаграмма намагничивающих сил пятисекционного вентильного электродвигателя. Согласно способу управления вентильным электродвигателем в режиме стопорения ротора подключают к источнику питания такую комбинацию секций обмотки якоря электрической машины, при которой электромагнитный момент препятствует движению ротора, регулируют уровни тока в секциях якорной обмотки электрической машины, фиксируют смену межкоммутационных интервалов, по крайней мере, при первой смене межкоммутационного интервала дополнительно регулируют токи в секциях обмотки якоря, увеличивая электромагнитный момент на очередном межкоммутационном интервале до величины, при которой он в начале очередного межкоммутационного интервала равен электромагнитному моменту в конце предьщущего межкоммутационного интервала.
При регулировании токов в секциях обмотки якоря создается результирзто- щая намагничивающая сила (НС) F, которая имеет вектор, смещенный в на
правлении движения ротора на угол JT
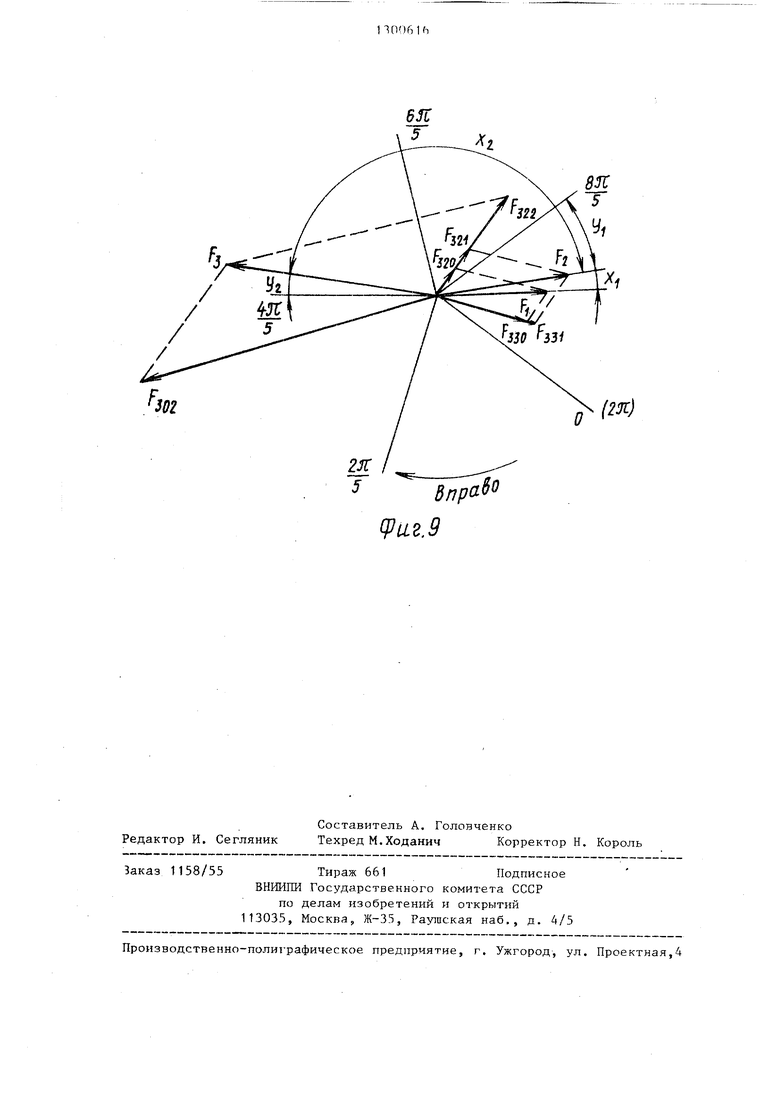
О X - Р
относительно вектора намагничивающей силы обмотки якоря F на предыдущем межкоммутационном интервале, причем
F, F.
sin
(х+у)
sin у
где у - угол между вектором результирующей намагничивающей силы ЕЗ и угловым положени
0 СУ
ем конца предыдущего межкоммутационного интервала,
JL 2р
р - число пар полюсов электрической машины.
Блок-схема вентильного электродвигателя, в котором может быть реализован способ управления, содержит электрическую машину 1 обмотка якоря которой составлена из трех секций 2-4, подключенных к преобразователю частоты 5. На валу электрической машины установлен датчик положения 6 с тремя выходами 7-9. Вращающийся индуктор (ротор) 10 электрической машины выполнен в виде постоянного магнита (фиг.1). Двухполупериодный преобразователь частоты 5 содержит шесть управляемых ключей 11-16, например транзисторов. По сигналам датчика положения 6 ротора формируются управляющие сигналы для открытия ключей 11-16 преобразователя частоты 5. Наличие напряжения на управляющих входах ключей 11-16 (фиг.2) свидетельствует о том, что они открыты. С управляющими входами ключей 11 и 15 связан выход 17 генератора импульсов регулируемой скважности, сигналами которого осуществляется регулирование, например, ограничение тока в секциях 2-4 якорной обмотки электрической машины 1.
Взаимодействие результирующей НС F секций обмотки якоря с НС индуктора вызывает электромагнитный момент, направленный против действия внешней нагрузки, для данного случая - вправо, который препятствует движению ротора.Регулирование,например, ограничение тока в обмотке якоря электрической машины осуществляют с помощью генератора 18 импульсов ре313
гулируемой скважности, при этом величина тока, протекающего по указанным секциям и создающего НС I (фиг.3) выбирается не из условия противодействия максимально- возможной внешней нагрузки, а значительно ниже На фиг.З показано пространственное расположение НС секций 2-4 обмотки якоря электрической машины 1.. Позициями 19, 20 и 21 показаны направле- ния векторов НС при прямом включении указанных секций, а позициями 22- при инверсном включении этих сек24
ций.
чае
Для создания НС F в данном слу- регулируется ток в секции 2, а распределение токов в секциях 3 и 4 происходит обратно пропорционально их активным сопротивлениям,. Если они равны, то равны и токи протекающие в секциях 3 и 4. Регулирование тока в секции возможно осуществить либо установкой определенной скважности импульсов генератора 18, либо по сигналам датчика тока, включенного в секцию 2. В последнем.случае генератор 18 выполняется в виде аналогового компаратора, а уровень ограничиваемого тока устанавливается изменением - опорного напряжения этого компаратора. Согласно способу фиксируют оме- ну межкоммутационных интервалов. По крайней мере при первой смене при уг41Гловом положении ротора - изменяют
уровни токов в секциях якорной обмотки таким образом, чтобы создаваемая НС F, имела вектор (фиг;3), смещенный относительно вектора НС F, в направлении движения ротора на угол О X i51, причем
sin
(х+у)
sin у
где О . Если учесть,
гг
что НС F
I,W
+ 2
- W cos 3 2 витков в каждой секции 2-4,
W - число
I, ток
протекающий в секции 2 при создании НС F и равный току потребления вентильного электродвигателя от источ-. ника постоянного тока, то согласно фиг.З имеем
F, cos X F, + F. cos
Я 3
+ F cos 1 Fj + Fjcosl + Fj
7Г COS -1,5 IjW.
, з . е О-15
- в20
25
35
40
45
50
.
где i, - ток в секции z, равный току источника питания, при этом секциями обмотки якоря создается регулирующая НС
Учитывая, что F получим I, 1
где К
sin
2
(х+у)
1
sin
, К,cos (х+у)
X,
sin
(1)
интервале
sin у При положении ротора на угловом
27Г 4jr
-о вентильный электродвигатель потребляет ток в К cos х раз больший, чем на угловом интерва43Т 8Г
ле -оТ-, и создает электромагнитный момент, амплитуда которого в К, раз превьшает амплитуду электромагнитного момента на угловом интерва4Jf 811Г .
ле Аналогичное последовательное применение способа позволяет осуществить несколько плавных, т.е. без скачков, момента, переходов на более энергоемкие, обеспечивающие большие электромагнитные моменты характеристики. Минимальный уровень тока в секциях может быть выбран нулевым .
В трехсекционном вентильном электродвигателе может быть реализован частный случай способа управления, когда при смене межкоммутационного интервала одновременно с регулированием тока в секциях якорной обмотки осуществляют подключение к источнику питания другой комбинации секций обмотки якоря.
Пусть к источнику питания подклю- чены секции 2 и 4 обмотки якоря при .положении ротора на угловом интерва43« 51F
ле
Зз (
Комбинацией ука
занных секций создается результирующая НС F , вектор которой направлен
5Jr под углом -.
При регулировании величины тока в комбинации, секций обмотки якоря дос
5130
таточно регулировать величину тока, по крайней мере, в одной секции например, в секции 2, так как секции 2 и 4 соединены последовательно, В случае подключения к источнику пита- ВИЯ секций больше двух регулирование, например, ограничение тока в этих секциях также возможно посредством регулирования тока по крайней мере в одной секции, в которую поступает полный ток от источника питания: для описываемого случая - это секция 2, Распределение токов в оставшихся секциях, включенных инверсно, происходит естественно, т.е. обратно пропор- ционально их активным сопротивлениям. Возможно регулировать ток в нескольких секциях обмотки якоря, например, для трехсекционной машины - в секции, в которую поступает полный ток от источника питания, и в одной из секций, включенных инверсно. В оставшейся секции будет протекать ток, равный разности между полным током, и током, протекающим в секции, включенной инверсно, в которой осуществляется регулирование. Регулирование в секции 2 возможно осуществлять с использованием датчика тока, включенного последовательно в секцию 2. При этом генератор 18 регулируемой скважности выполняется в виде аналогового компаратора с регулируемым порогом срабатывания. Согласно способу управления продолжают фиксировать последо- вательную смену межкоммутационных интервалов. По крайней мере,при очередной смене при угловом положении ро4гг
тора - подключают к источнику пита-
ния с помощью ключей 11, 15 и 16 преобразователя частоты 2 другую комбинацию секций 2, 3 и 4 обмотки якоря, создающую НС Fj,вектор которой смещен в направлении движения ротора, т.е.
влево, на угол О х т Одновременно с подключением комбинации секций 2-4 обмотки якоря регулируют уровень тока, например, в одной секции 2 таким образом, чтобы обеспечить
F. HLl3E±yI F 1 sin у
. .тг IT,
sin (-- + -7-)
6 6
. ЗТ sin -7 / F - II
п ЗТ Т где О -i у -г - -J
ЕС.ЛИ учесть, что НС F 2lWcos-r
v3 W l , где W - число витков в секции 2-4; I, - ток в секциях обмотки якоря, создающих результирующую НС F , Причем F
-f- 2- 3.- W I
I,W
J.P
ТГ 2 cos - - I,
W;
I 2-1,, где I
где ij - ток в секции 2,
5
5 0 0 5
,„
45
50
55
ший,чем на угловом интервале мого им на угловом интервале - равный току потребления вентильным электродвигателем от источника пита-- ния} при этом токе в секции 2 обмоткой якоря создается результирующая НС Fj .
При положении ротора на угловом
43Г
интервале - вентильный электродвигатель потребляет ток в два раза боль4 5|Г 3
и создает электромагнитный момент, максимальное значение которого в j3 раза превышает максимальное значение электромагнитного момента, создавае4Jr 5|Г 3
Аналогичное последовательное применение указанных операций позволяет осуществить несколько плавных переключений на более энергоемкие, обеспечивающие большие электромагнитные моменты характеристики (фиг.4).
Рассматриваемый способ управления вентильным электродвигателем может быть использован и для выполнения электрической машины с пятью секциями обмотки якоря.
Блок-схема такого вентильного электродвигателя содержит однополупериод- ный преобразователь частоты 2, выполненный на ключах 25-29 (фиг.5), обмотка якоря электрической машины 1 составлена из пяти секций 30-34, а датчик положения 6 ротора выполнен с пятью выходами 35-39. Блок-схема содержит также блок 40 задания постоянного включения комбинации ключей, блок 41 формирования сигналов правого и левого направления вращения, генератор 18 импульсов регулирования скважности. Выходы 42-46 Ьлока 41 связаны соответственно с цепями управления ключей 25-29 преобразователя частоты 5. С цепями управления кллчей 25, 27 и 28 связаны соответственно выходы 47-49 блока 40. Каналы 50, 51
ю
71300616
н 52 трехканального выхода 17 генератора 18 связаны соответственно с цепями управления ключей 25 и 26 посредством логических схем 2И 53, 54 и 55.
Информационные входы блрка 41 и генератора 18 подключены к выходам 35-39 датчика положения 6 ротора.Управляющий вход 56 блока 40 и управляющий вход 57 генератора 18 объединены и служат для задания- режима сто- порения ротора. Первый 58 и второй 59 управляющие входы блока 41 служат соответственно для задания направления вращения и режимов Пуск и
Стоп.
Блок 40 задания постоянного включения комбинации ключей выполнен в виде двухпозиционного реле с тремя группами контактов. При наличии управляющего напряжения на обмотке реле контакты замьжаются и на выходах 47-49 блока появляются управляющие сигналы единичного логического уровня
t5
20
8
подключены соответственно к датчик 60-62 тока и выходам мультиплексер 63-65. Выходы 87-89 гистерезисных реле 66-68 через схемы 90-92 Запрет образуют каналы 50-51 трехка нального выхода 17 генератора 18.У равляющие входы мультиплексеров 63 связаны с выходом датчика положени 3 ротора через логические схемы 2 И 93 и 94. Управляющие входы логичес ких схем Запрет объединены и обр зуют управляющий вход 57 генератора 18.
Датчики тока 60-62 могут быть лю бого типа, например резисторные,ин дуктивные или в виде датчиков Холл расположенных в зазоре магнитопрово да, несущего обмотку, по которой пр текает измеряемый ток.
Каждое из гистерезисных реле 66- 68 выполняется на основе компаратор 95 (фиг.7) с положительной обратной связью 96. Уровень срабатывания гис терезисных реле задается делителями
Блок 41 формирования сигналов пра- напряжения соответственно 69 и 71.
вого и левого направления вращения осуществляет преобразование сигналов датчика положения 3 ротора в управляющие сигналы ключами 25-29 преобразователя частоты 2 в двигательном и тормозном режимах. При наличии команды Стоп на втором 59 управляющем входе блока 41 на его выходах 42-46 отсутствуют управляющие сигналы.
Генератор 18 импульсов регулируемой скважности служит для регулирования токов в секциях обмотки якоря электрической машины 1. Его организация возможна по- различным функциональным схемам,как с обратной связью по току,так и без нее.На фиг.6 представлена схема генератора 18 с обратной свярью по току. Он содержит три датчика тока 60-62, включеннЬ1е соот ветственно в секции 30,32 и 33 обмотки якоря,три аналоговых мультиплексе- ра 63-65,три гистерезисных реле 66-68 три. делителя напряжения 69-71.Выводы 72-74 делителя 69 подключены соответственно к информационным входам муль- типлексера 63, выводы 75-77 делителя 70 - к информационным входам мульти- плексера 64, а выводы 78-80 - к информационным входам мультиплексера 65. Входы 81-83 измерительного напряжения и входы 84-86 опорного напряжения гистерезисных реле 66-68
.
0616
5
0
8
подключены соответственно к датчикам 60-62 тока и выходам мультиплексеров 63-65. Выходы 87-89 гистерезисных реле 66-68 через схемы 90-92 Запрет образуют каналы 50-51 трехканального выхода 17 генератора 18.Управляющие входы мультиплексеров 63-65 связаны с выходом датчика положения 3 ротора через логические схемы 2 ИЛИ 93 и 94. Управляющие входы логических схем Запрет объединены и образуют управляющий вход 57 генератора 18.
Датчики тока 60-62 могут быть любого типа, например резисторные,индуктивные или в виде датчиков Холла, расположенных в зазоре магнитопрово- да, несущего обмотку, по которой протекает измеряемый ток.
Каждое из гистерезисных реле 66- 68 выполняется на основе компаратора 95 (фиг.7) с положительной обратной связью 96. Уровень срабатывания гистерезисных реле задается делителями
напряжения соответственно 69 и 71.
35
40
, „
45
55
Значение гистерезиса каждого реле задается положительной обратной связью 96. Гистерезис может задаваться элементом временной задержки, например, конденсатором 97, подключение которого на вход компаратора показано условно.
Датчик положения 6 ротора может быть любого типа, например, индуктивный с подмагничиванием. На его выходах 35-39 формируются сигналы о положении ротора синхронной машины, смещенные для рассматриваемого случая друг относительно друга на угол
21Г „
-р-. Длительность казкдого сигнала соответствует угловому повороту рото-
2Jr pa на-Пс-В вентильном электродвигателе с пятисекционной электрической машиной способ реализуется следующим образом.
Предположим, что к источнику питания подключены секции 30, 32 и 33, jpoTop электродвигателя не вращается и при отсутствии внешней нагрузки находится в положении на угловом интервале -г- - 2Jr,
так как в этом положении вектор НС обмотки якоря и вектор НС индуктора совпадают по направлению и электромагнитный момент, прило
У13
женный к ротору электродвигателя,отсутствует. На втором входе 59 блока 41 присутствует сигнал Стоп, на выходах 42-46 его отсутствуют управляющие сигналы единичного логического уровня. На управляющих входах 56 и
57 блока 40 и генератора 18 присутст вуют единичные управляющие сигналы. Осуществляется режим стопорения ротора вентильного электродвигателя,пр котором на ротор действует,, например однонаправленная внешняя нагрузка, влево. В подключенных .секциях 30, 32 33 обмотки якоря регулируют ток. Ука
занными секциями в этом случае созда ется результирующая НС F (фиг.9).Работу з стройства для управления электродвигателем поясняют эпюры напряжения и моментные характеристики,представленные на фиг,8.Наличие единич- ного управляющего напряжен ия на входах ключей 25-29 преобразователя частоты 2 свидетельствует о том, что эти кллочи открыты. Значение угла поворота ротора (f- возрастает при вращении вправо. На угловом интервале
83Г
2 ЗТ с выходов 50-52 генератора
18 регулирующие ток импульсы поступают соответственно на цепи управления открытых ключей 25, 27 и 28 преобразователя частоты 5, причем в каждой фазе 30, 32 и 33 токи поддерживаются на уровнях, определяемых соответственно опорными напряжениями на выводах 72,, 75 и 78 делителей напряжения 69s 70 и 71, которые скоммути- рованы через аналоговые мультиплексоры 63-65 соответственно на входы 82-86 опорных напряжений гистерезис- ных реле 66-68. Пусть уровень тока в секции 30 регулируется на таком мало уровне, что НС данной секции можно пренебречь. Тогда согласно фиг,9
,ззт ,
( - у - х)
10
32.
F.
32.
де F
cos
ЗИП
F,
2ff 5
зз„
у НС, создаваемые соответственно секциями 32 и 33 обмотки якоря иа угловом интервале
25Т.
угол между вектором НС F, и угловым
положением конца межкоммутационного
интервала - - 27.
При учете, что WI W I
з.
32„ ъа и из расположения ве кто в
з
зз„
следует
i з
,3
М. IB.
sin -77Т - У - X )
10
.ЗЗГ sin % У + х)
К,
(2)
i з
Пропуская промежуточные математические выкладки, имеем
..35Т , cos (-уо - У - X,)
I F --- СЗ)
5г„ 1 .. , 1 2Ji,
W (
к, - ° Т
Ток потребления вентильным электродвигателем на рассматриваемом угловом интервале определяется как
(1 ) cos (- у -X,)
I F JLaIlL L l (4)
° „ / 1 2ТГ, W (:уг- + cos -F-) Kg 5
Далее, фиксируем смену межкоммутационного интервала и при угловом
положении ротора
изменяем уровни
токов в подключенных к источнику питания секциях обмотки якоря таким образом, чтобы создаваемая ими per зультирующая НС F имела вектор,смещенный в направлении движения ротора, т.е. влево, на угол О х 51,
Уровни токов в секциях обмотки якоря изменяются таким образом,чтобы обеспечить
45
sin (х,+у)
п
sin у
Ал
где О -i у
1 i
зт
Поясним ограничение у, -с -, При
малых значениях, принципиально возможно изменение уровней токов в секциях обмотки якоря, подключенных к источнику питания для перехода с мо- ментной характеристики, создаваемой с участием НС F, (фиг.8), на момент- ную характеристику, создаваемую с
участием НС F только в том случае, если значение у не превышает длительность половины полуволны момент Л
ных характеристик, т.е. -.
Равенство F F ,) 2 sin у
обеспечивает плавность перехода с одной моментной характеристики на дру- гую и исключает процесс автоколебаний ротора. Изменение уровней токов в секциях 30, 32, 33 обмотки якоря осуществляется за счет перекоммутации
входов 84-86 опорных напряжений гистерезисных реле 66-68 на вторые выводы 73,76,79 делителей напряжения 69-71. Пусть уровень тока в секции 30 устанавливается на таком низком уровне, что НС данной секции можно пренебречь.
27Г,
К
sin () cos ( - у )- cos -) sin у, cos (|| - у. -X, ) ( + cos -)
Определим токи - и - - 3i секциях 32 и 33 для углового ин тервала 4Т( 8Я 5 5
Из расположения векторов НС F , 2 и 33, (фиг.9) и при учете,
-° 3,; j3,,. 33; W 1„,
I W (f- + cos )
14 а J
F
(1 .cos-H-y -х)
F.cos ()
W (- + cos )
1
пропуская промежуточные математические выкладки, получим
20
35 ,
27Г,
( - у )- cos -) - у. -X, ) ( + cos -)
К I
зг.
33,
3J.
эа,
К.
Ток, потребляемый вентильным тродвигателем на угловом интерв
5
.
- - -, равен
1
К
1 +
-1 К„
Таким образом, выражения (2) - . (7) определяют соотношения между уровнями токов в секциях обмотки якоря при создании результирующих НС F и FJ- а также между уровнями токов потребления от источника питания на создание указанных НС.
При дальнейшем повторном использовании указанных выше операций продолжают фиксировать смену межкоммутационных интервалов и при угловом по411ложеНИИ ротора -г- изменяют уровни в
секциях 30, 32, 33 обмотки якоря,подключенных к источнику питания таким образом, чтобы создаваемая ими новая НС FJ имела вектор (фиг.9), который смещен в направлении движения ротора.
т.е. влево на угол х , причем
3f и может быть как угодно близок к
30 Причем для обеспечения стопорения
ротора необходимо обеспечить НС F, Fj. Из фиг.8 следует, что
X, y-V - у,
При условии FJ Fj, всегда У Xj Поэтому для наибольших значений Xj справедливо х ТГ.
Изменение уровня тока в секциях 30, 32, 33 производят так, чтобы обеспечить
35
40
45
РЗ
sin (ха.-Уй) sin у.
У
где О г yj 2
На угловом интервале О - - изменение токов в секциях 30, 32, 33 обмотки якоря осуществляется за счет перекоммутации входов 84-86 опорных напряжений гистерезисных реле 66-68 на третьи выводы 74, 77, 80 делителей напряжения 69-71. Пусть уровень тока в секции 33 устанавливается на таком низком уровне, что НС данной секции можно пренебречь.
1313
Регулирование токов в секциях 30 и 32 осуществляется на уровнях, определяемых из выражений, аналогичных (5) и (6), и производят аналогично описанному.
Рассмотренным способом управления вентильным электродвигателем в режиме стопорения ротора возможно осуществлять фиксацию вала при знакопеременной внешней нагрузке, формируя относительно середины углового ин8Ттервала -т 2 (фиг.8) моментные
характеристики либо зеркальным по отношению к изображенным, либо другим образом. Значения моментов вновь вводимых моментных характеристик имеет обратный знак по отношению к значениям ранее приведенных моментов (фиг.8). Реализация стопорения рото- ра в этом случае осуществляется пос ледовательньм наращиванием аналогичных элементов блока 40 и генератора 18 (фиг.5).
Таким образом, рассмотренный способ управления позволяет осуществить дифференциацию потребления электроэнергии в зависимости от уровня приложенной внешней нагрузки и повысить экономичность режима стопорения ротора вентильного электродвигателя.
Использование изобретения позволяет исключить из вентильных электродвигателей фрикционные муфты тормо- жения и стопорения, обладающие низким рессурсом, увеличивающие габариты вентильного электродвигателя. В частности для вентильных электродвигателей, у которых доля режима стопорения ротора от общего времени работы мала, обеспечение расторможенного состояния муфт требует значительных затрат электроэнергии, которая идет на удержание электромагни том якоря муфты в положении, не препятствующем вращению ротора электродвигателя. Использование изобретения позволяет исключить указанные потери электроэнергии, при незначительных затратах на обеспечение режима стопорения. Такой режим работы вентильного электродвигателя при периодической внещней нагрузке в режиме стопорения ротора, когда с одной
.-
стороны обеспечияаутгя падг жнос сто- порение вала вентилр)1ого электрсрдри- гателя, а с другой стороны потребление электроэнергии вентильным электродвигателем происходит Б зависимости от уровня внешней нагрузки, весьма благоприятен при работе от систем Электроснабжения автономных объектов.
Применение способа управления вентильным электродвигателем наиболее целесообразно в электродвигателях с косинусоидальным распределением НС секций обмотки якоря и индуктора в воздушном зазоре. В случае некосинусоидального распределения указанных НС применение способа справедливо для первых гармоник этих НС, которые играют определяющую роль в формировании моментных характеристик электродвигателя в режиме стопорения ротора, а высшие гармонические составляющие вызывают искажение моментных характеристик. В большинстве электродвигателей стремятся приблизить распределение указанных НС к косину соидальному и поэтому применение в таких электродвигателях указанного способа оправдано.
3540
45
50
55
Формула изобретения
Способ управления вентильным электродвигателем в режиме стопорения ротора, согласно которому подключают к источнику питания такую комбинацию секций обмотки якоря электрической машины, при которой электромагнитный момент препятствует движению ротора, регулируют уровни тока в секциях обмотки якоря электрической машины, отличающийся тем, что, с целью повышения энергетических показателей, фиксируют смену межкоммутационных интервалов, по крайней мере при первой смене межкоммутационных интервалов дополнительно регулируют токи в секциях обмотки якоря, увеличивая электромагнитный момент до величины, при которой он в начале очередного межкоммутационного интервсша равен величине электромагнитного момента в конце предыдущего межкоммутационного интервала.
fpuz.
6 с i л 4я Jjr }яг } J33
BfipaSo


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1571728A1 |
| Способ компенсации пульсаций вращающего момента вентильного электродвигателя | 1986 |
|
SU1480045A1 |
| Способ управления вентильным электродвигателем | 1986 |
|
SU1415348A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1646025A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Вентильный электродвигатель | 1977 |
|
SU738060A1 |
| Вентильный электродвигатель | 1985 |
|
SU1309241A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение энергетических показателей вентильного электродвигателя в режиме стопорения ротора. Указанная цель достигается тем, что в способе управления вентильным электродвигателем в режиме стопорения ротора подключают к источнику питания с по- м( щью преобразователя 5 частоты комбинацию секций 2,3,4 обмотки электрической машины 1 и якоря и регулируют ток в подключенных секциях. Намагничивающая сила указанной комбинации секций совместно с намагничивающей силой индуктора создает электромагнитный момент, препятствующий движению ротора. При одной из смен межкоммутационных интервалов изменяют уровни токов в секциях 2,3,4 якорной обмотки, подключенных к источнику питания таким образом, чтобы вновь созданная намагничивающая сила секций обмотки якоря была больще прежней, а текущее значение электромагнитного момента при изменении уровней токов в секциях не изменялось скачком. 9 ил. i (Л со о о Oi О5 Фи.7
к
-ел J6
-0
37 -0
X
о
J3f l/rt
«Риг.
.
Pus.f
457
f,
т
dnpf
Редактор И. Сегляник Заказ 1158/55
Составитель А, Головченко
Техред М.Ходанич Корректор Н. Король
Тираж 661Подписное
ВНИИ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раугаская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
(Риг,9
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
