Изобретение относится к горному делу, а более конкретно к приборам для определения элементов залегания горных пород по ориентированному керну, полученному при бурении геологоразведочных скважин.
Цель изобретения - ускорение процесса измерения и упрощение конструкции.
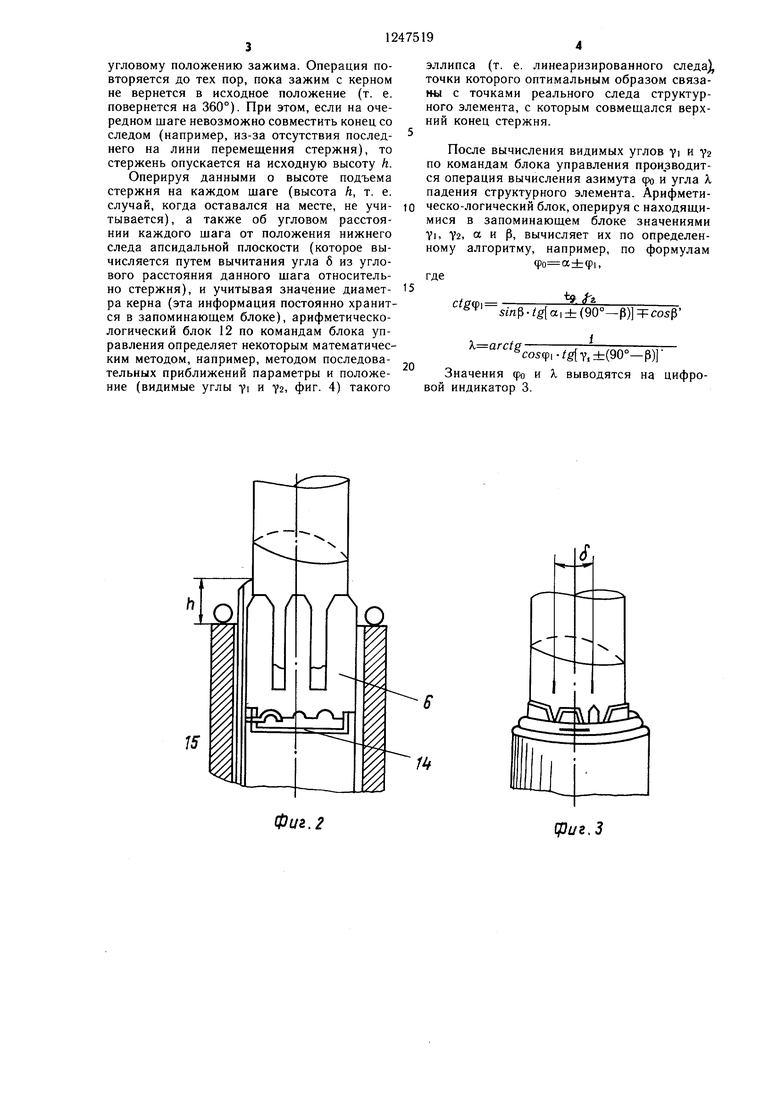
На фиг. 1 приведен кернометр в исходном положении, общий вид; на фиг. 2 - верхняя часть стакана, разрез; на фиг. 3 -
вид индикатора при визуализации угла кер- Q нижним торцом зажима и электрического
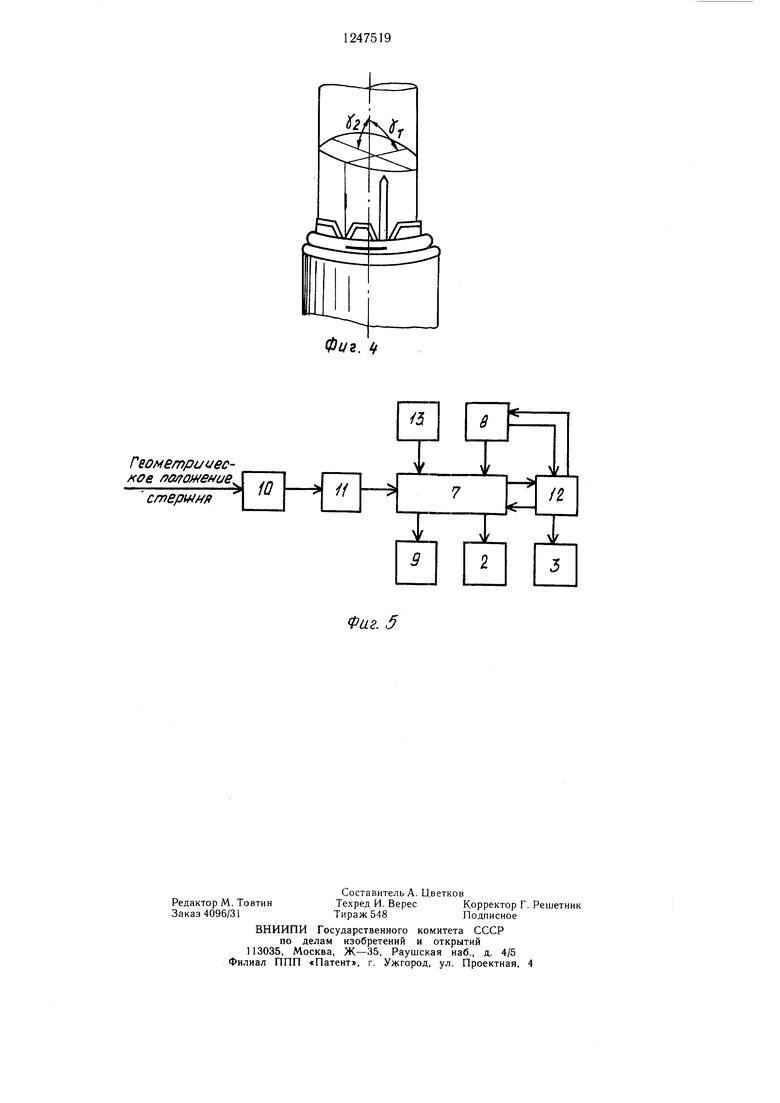
ноориентатора б; на фиг. 4 - стержень в операции копирования формы структурного элемента; на фиг. 5 - структурная электрическая схема кернометра.
Кернометр состоит (фиг. 1) из основаконтактирования с площадкой 14 при положении контакта между выемками. Кроме того, конструктивно предусмотрено, что при попадании контакта 15 в выемку зажим фиксируется в этом положении (из которония 1, в котором расположены блок 2 ввода 15 го он может быть с некоторым усилием
параметров пространственного положения керна (т. е. значений азимутального и зенитного углов скважины и угла керноори- ентатора) в виде цифровой клавиатуры (содержащей также клавищи управления работой кернометра), цифровой индикатор 3. На основании крепится цилиндрический стакан 4, в котором размещен узел копирования структурного элемента на керне в виде стержня 5, расположенного по внутренней поверхот руки выведен), причем, момент фиксации сопровождается щелчком.
Измерения с помощью кернометра ведут следующим образом.
Керн закрепляют в цанговом зажиме 4 стакана, совмещая при этом метку, нанесенную керноориентатором, с продольной осью стержня 5 (фиг. 1).
Затем с помощью блока 2 вводят в за- помийающий блок 7 параметры, необходиности стакана и зажима 6, например, цан- 25 для вычислений, т. е. значения азигового типа, имеющего возможность поворота вокруг оси стакана. Стержень, в исходном положении несколько (например на величину h, фиг. 2) выступающий над стаканом, имеет возможность перемещения вдоль него с фиксацией в любом положении. Керно- зо метр содержит также (фиг. 5) расположенные в основании запоминающий блок 7, два входа которого соединены соответственно с блоком 2 и блоком 8 управления (состоящим, например, из тактового генератора.
мутального а и зенитного р углов скважины (по данным инклинометрических измерений), а также угла кериоориентатора б (т. е. угла между меткой на керне и ап- сидальной плоскостью).
После этого нажатием соответствующей клавиши запускают кернометр в работу по следующему алгоритму, хранящемуся в программной памяти блока управления. Сначала производится операция разметки. По команде блока 8 управления значения угла б
программной памяти, блока микропрограм- 35 из запоминающего блока 7 поступает на инмного управления и устройства ввода-вы-дикатор 9, визуализирующий это значение,
вода и выполненным на основе микропро-например, светящейся полоской, длина коцессорного набора интегральных схем), аторой пропорциональна углу б (фиг. 3).
выход - с линейным индикатором 9, жест- ко закрепленным (фиг. 1) на верхнем торце стакана и выполненным, например, на осноПротив конца светящейся полоски оператор делает на керне отметку, соответствующую
нижнему следу апсидальной плоскости (не- ве матричного светодиодного индикатора обходимую в дальнейщем для ориентирован- кольцевой формы, причем начало отсчетаной увязки керна как внутри рейса, так индикатора совпадает с продольной осьюи между рейсами).
стержня 5.Затем переходят к операции копироваВ основании, кроме того, расположен 45 ния формы структурного элемента. Для этого
преобразователь 10 положения стержня в электрический сигнал (представляюпдий собой датчик положения, например, реостатного типа, связанный со стержнем 5), выход которого через аналого-цифровой преобразователь (АЦП) 11 соединен с запоминающим блоком 7, двухсторонне связанным с арифметическо-логическим блоком 12, также двухсторонне связанным с блоком 8, второй выход которого подключен к блоку 7, третий вход которого подключен к датчику 13 углового положения зажима. Датчик 13 со- держит, например, реверсивный счетчик импульсов, связанный с формирователем имвыдвигают стержень до совмещения его верхнего конца со следом структурного элемента (фиг. 4), фиксируют в этом положении и поворачивают, например, по часовой стрелке зажим с керном на один шаг (отме- 50 чаемый щелчком). При этом срабатывает контактная группа датчика 13, т. е. контакт 15 отжимается к площадке 14, замыкая электрическую цепь, и информация об угловом положении зажима с керном поступает на адресную щину блока 7, который запоминает значение высоты подъема (посту- паюш.ее с преобразователя 10 через AIJ,n 11) в ячейке памяти, соответствующей данному
пульсов (счетчики и формирователь не показаны), а последний связан с контактной группой датчика, предоставленной совокупностью выемок, выполненных с равным ща- гом, например, через 5° по окружности нижнего торца зажима (фиг. 2), контактной площадки 14, а также подпружиненного контакта 15 (расположенного неподвижно относительно стакана) с возможностью его механического взаимодействия с
нижним торцом зажима и электрического
контактирования с площадкой 14 при положении контакта между выемками. Кроме того, конструктивно предусмотрено, что при попадании контакта 15 в выемку зажим фиксируется в этом положении (из которо го он может быть с некоторым усилием
от руки выведен), причем, момент фиксации сопровождается щелчком.
Измерения с помощью кернометра ведут следующим образом.
Керн закрепляют в цанговом зажиме 4 стакана, совмещая при этом метку, нанесенную керноориентатором, с продольной осью стержня 5 (фиг. 1).
Затем с помощью блока 2 вводят в за- помийающий блок 7 параметры, необходи для вычислений, т. е. значения азимутального а и зенитного р углов скважины (по данным инклинометрических измерений), а также угла кериоориентатора б (т. е. угла между меткой на керне и ап- сидальной плоскостью).
После этого нажатием соответствующей клавиши запускают кернометр в работу по следующему алгоритму, хранящемуся в программной памяти блока управления. Сначала производится операция разметки. По команде блока 8 управления значения угла б
из запоминающего блока 7 поступает на инторой пропорциональна углу б (фиг. 3).
Против конца светящейся полоски оператор делает на керне отметку, соответствующую
нижнему следу апсидальной плоскости (не- обходимую в дальнейщем для ориентирован- ной увязки керна как внутри рейса, так и между рейсами).
выдвигают стержень до совмещения его верхнего конца со следом структурного элемента (фиг. 4), фиксируют в этом положении и поворачивают, например, по часовой стрелке зажим с керном на один шаг (отме- чаемый щелчком). При этом срабатывает контактная группа датчика 13, т. е. контакт 15 отжимается к площадке 14, замыкая электрическую цепь, и информация об угловом положении зажима с керном поступает на адресную щину блока 7, который запоминает значение высоты подъема (посту- паюш.ее с преобразователя 10 через AIJ,n 11) в ячейке памяти, соответствующей данному
угловому положению зажима. Операция повторяется до тех пор, пока зажим с керном не вернется в исходное положение (т. е. повернется на 360°). При этом, если на очередном шаге невозможно совместить конец со следом (например, из-за отсутствия последнего на лини перемещения стержня), то стержень опускается на исходную высоту h. Оперируя данными о высоте подъема стержня на каждом шаге (высота ft, т. е.
эллипса (т. е. линеаризированного следа), точки которого оптимальным образом связаны с точками реального следа структурного элемента, с которым совмещался верхний конец стержня.
После вычисления видимых углов YI и у2 по командам блока управления производится операция вычисления азимута фо и угла А, падения структурного элемента. Арифмети I 1|/1 пл па I. ц (.i i ч, у ихл v-v v irj ж, . - i j j г
случай, когда оставался на месте, не учи- ю ческо-логический блок, оперируя с находящитывается), а также об угловом расстоянии каждого шага от положения нижнего следа апсидальной плоскости (которое вычисляется путем вычитания угла б из углового расстояния данного шага относительно стержня), и учитывая значение диамет- 15 ра керна (эта информация постоянно хранится в запоминающем блоке), арифметическо- логический блок 12 по командам блока управления определяет некоторым математическим методом, например, методом последова- Q тельных приближений параметры и положение (видимые углы Vi и V2, фиг. 4) такого
мися в запоминающем блоке значениями Yb V2, аир, вычисляет их по определенному алгоритму, например, по формулам
, где
5i/ip.(90°-p)Tcosp i
,..±(90°-р)Г
Значения фо и X выводятся на цифровой индикатор 3.
эллипса (т. е. линеаризированного следа), очки которого оптимальным образом связаны с точками реального следа структурного элемента, с которым совмещался верхний конец стержня.
После вычисления видимых углов YI и у2 по командам блока управления производится операция вычисления азимута фо и угла А, падения структурного элемента. Арифмети1- - i j j г
ческо-логический блок, оперируя с находящическо-логический блок, оперируя с находящимися в запоминающем блоке значениями Yb V2, аир, вычисляет их по определенному алгоритму, например, по формулам
, где
5i/ip.(90°-p)Tcosp i
,..±(90°-р)Г
Значения фо и X выводятся на цифровой индикатор 3.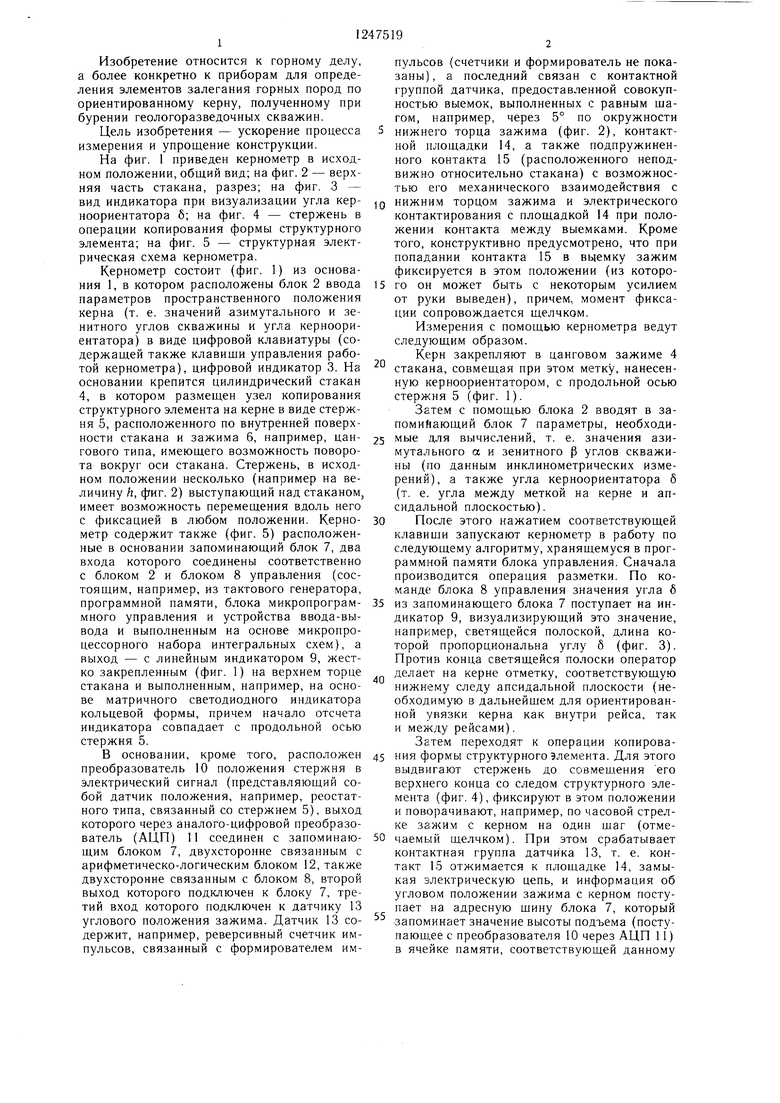
| название | год | авторы | номер документа |
|---|---|---|---|
| Кернометр | 1983 |
|
SU1102918A1 |
| Керноориентатор многократного действия | 1983 |
|
SU1154432A1 |
| Керноориентатор | 1983 |
|
SU1121389A1 |
| Керноориентатор | 1981 |
|
SU969893A1 |
| Керноориентатор | 1980 |
|
SU941540A1 |
| Керноориентатор многократного действия | 1981 |
|
SU1104238A1 |
| Разметочное устройство для керноориентатора | 1981 |
|
SU996717A1 |
| Кернометр | 1981 |
|
SU1027381A1 |
| Кернометр | 1979 |
|
SU794211A1 |
| Керноориентатор | 1988 |
|
SU1559099A1 |

/5
Фив. 2
сриг. 3
Фи. if
Геометрическое ,
cmepy Hfi
Составитель А. Цветков
Техред И. ВересКорректор Г. Решетник
Тираж 548Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фаг. 5
| Кернометр | 1981 |
|
SU1027381A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кернометр | 1983 |
|
SU1102918A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
