Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля величины отклонения хода якоря от нормы импульсных поляризованных реле, находящихся в эксплуатации при непосредственном вьшолнении ими своих функциональных задач в составе действующих систем.
Цель изобретения - повышение производительности контроля и расширение области применения путем обеспечения возможности контроле импульсных поляризованных электромагнитных реле.
На фиг. 1 приведены графические зависимости изменения амплитуды механических колебаний корпуса реле в зависимости от величины отклонения хода якоря; на фиг. 2 - структурная схема устройства для реализации предлагаемого способа.
Контроль хода якоря импульсных поляризованных реле согласно предлагаемому способу осуществляется следующим образом.
При подаче импульсов тока в обмотку испытуемого реле воспринимают механические колебания, генерируемые реле при последовательном замыкании его замыкающих и размыкающих контактов, преобразуют их в электрические сигналы, поочередно разделяют их на две последовательности, запоминают максимальные значения, напряжения каждой, величину отклонения хода якоря определяют как отношение зафиксированных значений, а по знаку судят о характере отклонения контролируемого параметра от нормы. Контроль хода якоря производится без вскрытия кожуха исследуемого реле.
Возможность использования механических колебаний корпуса импульсного поляризованного реле для контроля величины хода его якоря объясняется тем, что, в случае, когда ход якоря соответствует установленной для данного типа реле норме, сила удара якоря при срабатывании реле в момент замыкания замыкающих контактов равна силе удара при отпускании его в момент замыкания размыкающих контактов в результате чего поочередно генерируемые импульсные механические колебания корпуса реле имеют одинаковые ам плитуды. С уменьшением хода якоря сила удара его при срабатывании увеличивается, а при отпускании уменьшает
ся, ив соответствии с этим увеличивается амплитуда механических колебаний, генерируемых в корпусе при замыкании замыкающих контактов, но умень- шается при замыкании размыкающихся контактов. При увеличении хода якоря имеет место противоположная зависимость.
При этом установлено, что логарифм отношения амплитуд механических колебаний, генерируемых соответственно при замыкании замыкающих /1 и размыкающихся Д контактов, характеризует величину отклонения
хода якоря от нормы.
Таким образом, по значеник; логарифма отношения амплитуд механических колебаний, генерируемых соответственно при поочередном срабатывании
и отпускании импульсного поляризованного реле, можно определить величину отклонения хода якоря от нормы, а по знаку установить больше или меньше это отклонение установленной
нормы.д
« Л.
30
35
40
45
где uS 5-5
55
разность величины соответственно реального и номинального хода якоря; о - основание логарифма.
На фиг. 1 кривые о( и 8 показывают изменение амплитуд механических колебаний корпуса реле, приведенных к электрическим напряжениям в момент удара якоря при замыкании соответственно замьшающихся U и размыкающихся и контактов, а кривая Y - отношение этих амплитуд , от величины отклонения хода якоря от нормы д6 .
Анализ графических зависимостей показывает, что кривая } представляет собой показательную функцию вида , что обеспечивает возможность определять величину отклонения хода якоря от нормы на осно- 5° вании равенства uS О2,ди .
Устройство для реализации предла- гаемого способа включает в себя контролируемое реле 1, виброизмерительный преобразователь 2, усилитель 3, синхронизатор 4, вьтолненньй в виде схемы дифференциального усилителя с двумя входами, которые подключаются к клеммам обмотки контролируемого
ч
реле, триггер 5, счетчик 6, первьп аналоговый ключ 7, второй аналоговы ключ 8, первый экстремальный детектор 9, второй экстремальньй детекто 10, схема логарифмирования отношени входных сигналов 11 и аналого - цифровой преобразователь 12.
Устройство работает следующим образом.
При поступлении импульса тока в обмотку контролируемого импульсного поляризованного реле 1 якорь его, двигаясь к противоположному полюсному наконечнику, замыкает замыкающиеся контакты и в момент удара воз буждает в корпусе реле механические колебания.
Эти колебания воспринимаются виб роизмерительным преобразователем 2, преобразуются им в электрические сигналы, которые через усилитель .3 поступают на информационные входы аналоговых ключей 7 и 8. Одновременно с этим сигналом с выхода синхронизатора 4 взводится триггер 5, бла годаря чему потенциал высокого уровня с прямого выхода его подается на первый управляющий вход первого аналогового ключа 7, а потенциал низко уровня с его инверсного выхода пост пает на первый управляющий вход второго ключа 8. При этом счетчик 6 сброшен и с его выхода подается сигнал низкого уровня на вторые управляющие входы ключей 7 и 8. При указан ном условии второй аналоговый ключ 8 по первому управляющему.входу закрыт а ключ 7 открыт, благодаря чему сигнал с выхода усилителя 3 поступает на вход первого экстремального детек тора 9, в котором запоминается максимальное значение амплитуды.
По окончании импульса тока в обмоке реле якорь, перемещаясь в проти- воположную сторону, замыкает размы- кающие контакты и в момент удара возбуждает в корпусе реле следующий импульс механических колебаний, который аналогичным образом преобразуется в электрический сигнал и через усилитель 3 подается на информационные входы ключей 7 и 8. При этом сигналом низкого уровня с выхода синхронизатора 4 триггер 5 сброшен, на прямом выходе его сигнал низкого
уровня, а на инверсном - высокого, благодаря чему ключ 7 по первому управляющему входу закрыт, а ключ 8
открыт, благодаря чему сигнал d выхода его поступает на вход второго экстремального детектора 10 и запоминается в нем.
При дальнейшем поступлении импульсов Тока в обмотку контролируемого реле указанная последовательность работы схемы повторяется, эксремальные детекторы 9 и 10 поочередно запоминают максимальные значения амплитуд механических колебаний, генерируемых соответственно при замкании замыкающихся и размыкающихся контактов, а счетчик 6 фиксирует количество этих импульсов путем подсчета числа срабатываний триггера 5 При определенном числе его срабатываний, например десяти, на выходе счетчика 6 появля гтся сигнал высокого уровня, который по одной цепи поступает на вторые управляющие вхо ды аналоговых ключей 7 и 8 и закрывает их, а по другой - на управляющий его вход аналого-цифрового преобразователя 12 и тем самым осуществляет, его запуск. С этого момента прекращается поступление электрических сигналов с выхода усилителя 3 на входы экстремальных детекторов 9 и 10, и начинается преобразование аналоговой величины с выхода схемы логарифмирования отношения входных сигналов 11 аналого-цифровым преобразователем 12 в цифровую форму, соответствующую величине отклонеиия контролируемого хода якоря от нормы. Таким образом, основное достоинство предлагаемого способа контроля хода якоря импульсных поляризованных реле заключается в- том, что в процессе контроля сохраняется режим нормального функционирования систем, содержащих Контролируемые реле. Указанное обстоятельство исключает необходимость отключения реле при проведении периодических проверок их механических характеристик, что позволяет обеспечить непрерывный режим работы систем и управляемых ими тех- ноло-гических процессов.
Кроме того, использование предлагаемого способа позволяет повысить производительность контроля примерно в 3 раза. Повьппение производительности достигается за счет того, что предлагаемый способ не требует отключения контролируемых реле от схем, в которых они задействованы.
доставки их в пункт контроля, установки на испытательном стенде, обратной доставки их к месту установки и соответствующего подключения, что требует больших затрат времени, людских и технических ресурсов.
Одновременно с этим практическое использование предлагаемого способа позволяет установить оптимальные сроки регулировки хода якоря импульных поляризованных реле и тем самым .сократить время простоя аппаратуры и штат обслуживающего персонала.
Формула- изобретени
Способ контроля хода якоря электромагнитного реле путем подачи импульсов напряжения в обмотку реле, отличающийся тем, что, с. целью повьшения производительности контроля и расширения области применения путем обеспечения возможности контроля импульсных поляризованных электромагнитных реле, воспринимают механические колебания,
генерируемые реле при последовательном замыкании его замыкающих и размыкающих контактов, преобразуют их в электрические сигналы, выделяют первую последовательность электрических сигналов при замыкании замыкающих контактов реле и вторую последовательность электрических сигналов при замыкании размыкающих кон- . тактов реле, фиксируют максимальное значение напряжения каждой из указанных последовательностей, величину отклонения хода якоря определяют
как логарифм отношения максимального значения напряжения первой последовательности к максимальному значению напряжения, а по знаку указанного логарифма второй последовательности
судят о характере отклонения хода якоря от нормы, причем положительное значение логарифма соответствует уменьшению хода якоря по отношению к установленной норме, а отрицательное значение логарифма соответствует увеличению хода якоря по отношению к установленной норме.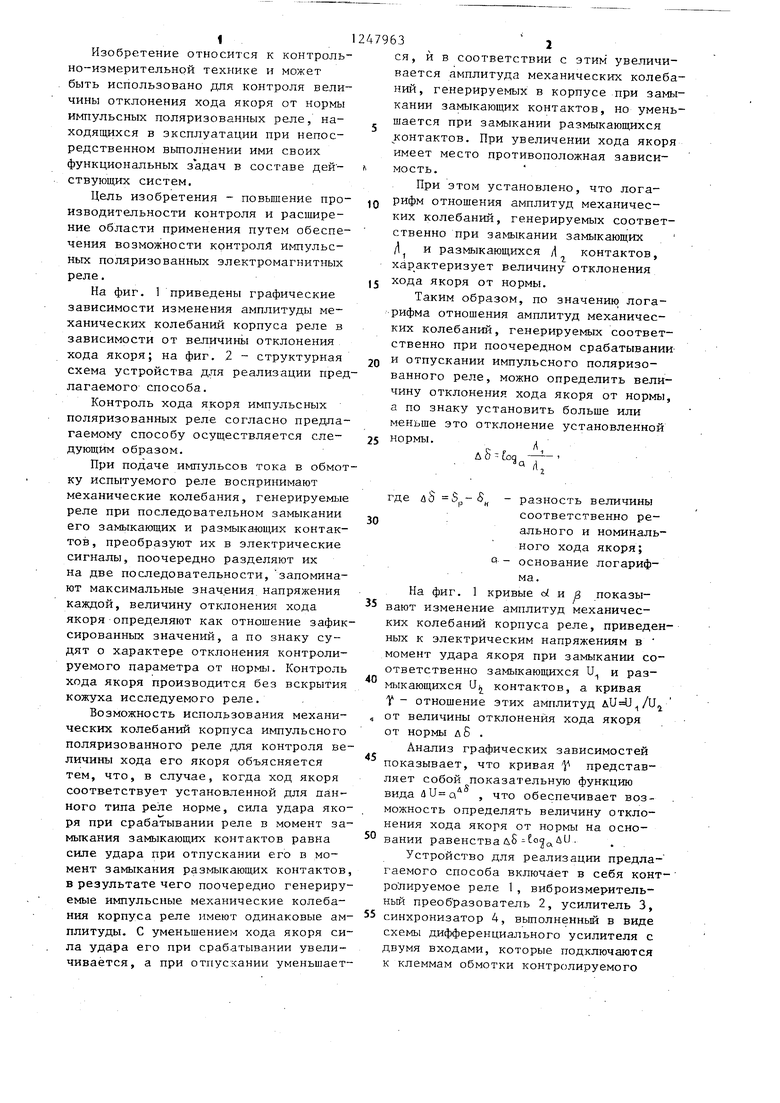



Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля величины отклонения хода якоря от нормы в импульсных поляризованных реле, находящихся в эксплуатации в составе действующих систем. Цель изобретения - повышение производительности контроля импульсных поляризованных электромагнитных реле. При подаче импульсов тока в обмотку испытуемого реле воспринимают механические колебания, генерируемые реле при последовательном замыкании его замыкающих и размыкающих контактов, преобразуют в электрические сигналы, поочередно разделяют их на две последовательности, запоминают максимальные значения напряжения каждой, величину отклонения хода якоря определяют как отношение зафиксированных значений, а по знаку судят о характере отклонения контролируемого параметра от нормы. Контроль хода якоря производят без вскрытия кожуха исследуемого реле. В случае, когда ход якоря соответствует установленной для данного типа реле норме, сила удара якоря при срабатывании реле в момент замыкания замыкающих контактов равна силе удара при отпускании его в момент замыкания размыкающих контактов, в результате чего поочередно генерируемые импульсные механические колебания корпуса реле имеют одинаковые амплитуды. С уменьшением хода якоря сила удара его при срабатывании увеличивается, а при отпускании уменьшается. По значению логарифма отношения амплитуд механических колебаний, генерируемых соответственно при поочередном срабатывании и отпускании импульсного поляризованного рел.е, можно определить величину отклонения хода якоря от нормы, а по знаку установить больше или меньше это отклонение установленной нормы. 2 ил. (Л ю 4; о сэ: 00
-0,1
01
(мм
pi/e. 1
Редактор М. Петрова
Заказ 4133/53Тираж 643Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель Н.-Малахова
Техред О.Гортвай Корректор М. Максимишинец
| Барабанно-лопастной рабочий орган | 1973 |
|
SU458656A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения механических характеристик электромагнитных реле | 1978 |
|
SU733045A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
