Самоблокирующиеся дифференциалы с червячными парами, играющими роль муфт свободного хода для привода ведущих колес автомащины, известны.
Недостатком подобного типа известных дифференциалов является высокое удельное давление в рабочих деталях механизма.
В описываемом изобретении этот недостаток устранен тем, что самоблокирующийся дифференциал выполнен с установленными свободно, на осях в корпусе дифференциала, червяками, имеющими по две конических опоры трения скольжения и по две торцовых щариковых опоры.
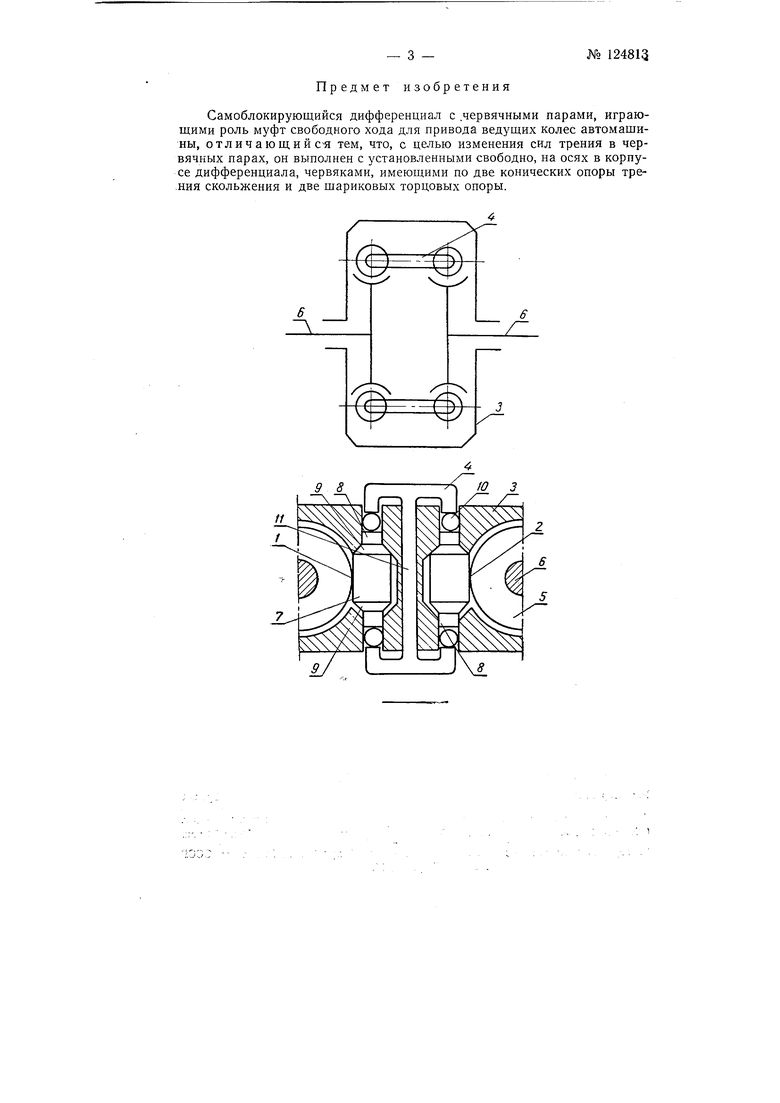
На чертеже изображена схема описываемого дифференциала в двух проекциях.
Самоблокирующийся дифференциал имеет две червячные пары и 2, корпус 3 и подвижную рамку 4 со скобами,. Каждая червячная пара состоит из червячной щестерни 5, связанной через полуось 6 с вед-ущим колесом, и червяка 7, установленного свободно на осях 8 в корпусе 3 дифференциала. Червяк 7 может свободно перемещаться в осевом направлении в пределах небольшого (порядка 5 мм) зазора между коническими поверхностями 9 червяка 7 и тела корпуса 3. Между торцами осей 8 и скобами рамки 4 положены шарики 10.
Угол подъема средней винтовой линии червяка 7 взят таким ,чтобы при отсутствии трения в торцовых опорах червяка 7 червячная пара была бы обратимой, а при наличии трения - необратимой. Трение в опорах червяка 7 будет минимальным, если в качестве торцовой опоры червяка 7 иметь центральный шарик W; трение будет повышенным, если торцовая опора имеет коническую поверхность 9. В рабочем состоянии дифференциала торцовой опорой червяка 7 в одном направлении всегда будет коническая поверхность .9, а в другом - центральный шарик 10.
№ 124813
Для изменения направления момента, передаваемого через -дифференциал, достаточно центральный шарик 10 заменить конической поверхностью Р, а на противоположной стороне вместо конической опоры 9 червяка 7 иметь центральный шарик 10. С этой целью каждый червяк 7 имеет два шарика 10, расположенные по обе стороны червяка 7 и две торцовые конические поверхности 9. Шарики 10 с некоторым зазором охватываются скобами рамки 4. Скобы рамки 4 двух соседних червяков 7 объединены продольной полосой в общую рамку //. Движение рамки 11 в направлении оси червяка 7 происходит автоматически при изменении направления врапдения корпуса 3 дифференциала; этим обеспечивается переключение дифференциала с переднего на задний ход.
Рабочий процесс дифференциала происходит в следующем порядке. . При прямолинейном движении, когда радиусы качения обоих колес одинаковые, заклиниваются оба механизма свободного хода, так как обе пары червяков 7 будут прижаты коническими поверхностями к тор-, цовым опорам в корпусе 3 дифференциала. Через каждую червячную пару/и 2 будет передаваться момент к ведущим колесам. Если бы колеса были жесткими, то небольшая разница в радиусах колес привела бы к различной угловой скорости и выключению тем самым одного из ведущих колес. У колес, снабженных эластичными щинами, радиусы качения зависят от передаваемого момента. Поэтому, когда через отстающее колесо передается больший момент, радиус качения его уменьшается. При небольшой разнице в радиусах качения угловые скорости колес выравниваются, и оба колеса остаются ведущими, хотя величина момента, передаваемого через правое и левое колеса, будет различна.
В случае, когда по условиям движения колеса .должны вращаться с неодинаковыми угловыми скоростями (например, при повороте), червячная шестерня 5, связанная с полуосью 6 забегающего колеса, благодаря зазору отведет червяк 7 от конической опорной поверхности 9 и прижмет его к центральному шарику 10. Червяк 7 начнет свободно вращаться, так как червячная пара в этом случае будет обратимой. Передача усилий от корпуса 3 дифференциала к забегающему колесу прекратится, а колесо получит возможность вращаться с угловой скоростью большей, чем скорость корпуса 3 дифференциала. Перемещение рамки 11, в этом случае, исключается, так как она опирается на ось 8 червяка 7, связанного с отстающим колесом, через которое в этот период передается момент от корпуса 3 дифференциала. Если бы червяки 7 не были связаны между собой рамкой 11, то червяк, расположенный на стороне забегающего колеса, мог бы прижаться конической поверхностью 9 к опоре в корпусе 3 дифференциала и оказаться, таким образом, заклиненным.
При включении заднего хода в коробке передач корпус 3 дифференциала, поворачиваясь на некоторый угол, выбирает осевой зазор и в работу вступает вторая пара конических торцовых опор 9 червяков 7 и вторая пара центральных шариков 10. Кинематика и динамика дифференциала сохраняются и будут аналогичны случаю движения автомобиля вперед, поэтому сохраняется возможность как передачи момента, так и вращения колес с различной скоростью.
При торможении автомобиля центральным тормозом или двигателем оба колеса имеют возможность перемещаться только в одном направлении, что исключает вероятность заноса автомобиля.
При работе дифференциала, когда одно из колес имеет скорость большую, чем второе колесо, червяк 7 вращается свободно, без нагрузки. Поэтому износ червячной пары будет весьма малым, а, следовательно, долговечность дифференциала достаточно больщой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатый автолог | 1949 |
|
SU131597A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089409C1 |
| Самоблокирующийся дифференциал | 1982 |
|
SU1082639A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ С ДОПОЛНИТЕЛЬНЫМИ СВОБОДНЫМИ САТЕЛЛИТАМИ | 2011 |
|
RU2465499C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2548237C1 |
| ПРИВОДНОЙ МОСТ КОЛЕСНОГО СРЕДСТВА | 1994 |
|
RU2086428C1 |
| Самоблокирующийся дифференциал транспортного средства | 1990 |
|
SU1705144A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242655C2 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |