Изобретение относится к устройствам для управления рабочими органами машин, в частности машин для механизации сельского хозяйства, например устройств для механизации раздачи кормов.
Цель изобретения - расширение функ- циональных возможностей устройства путем его дистанционного регулирования.
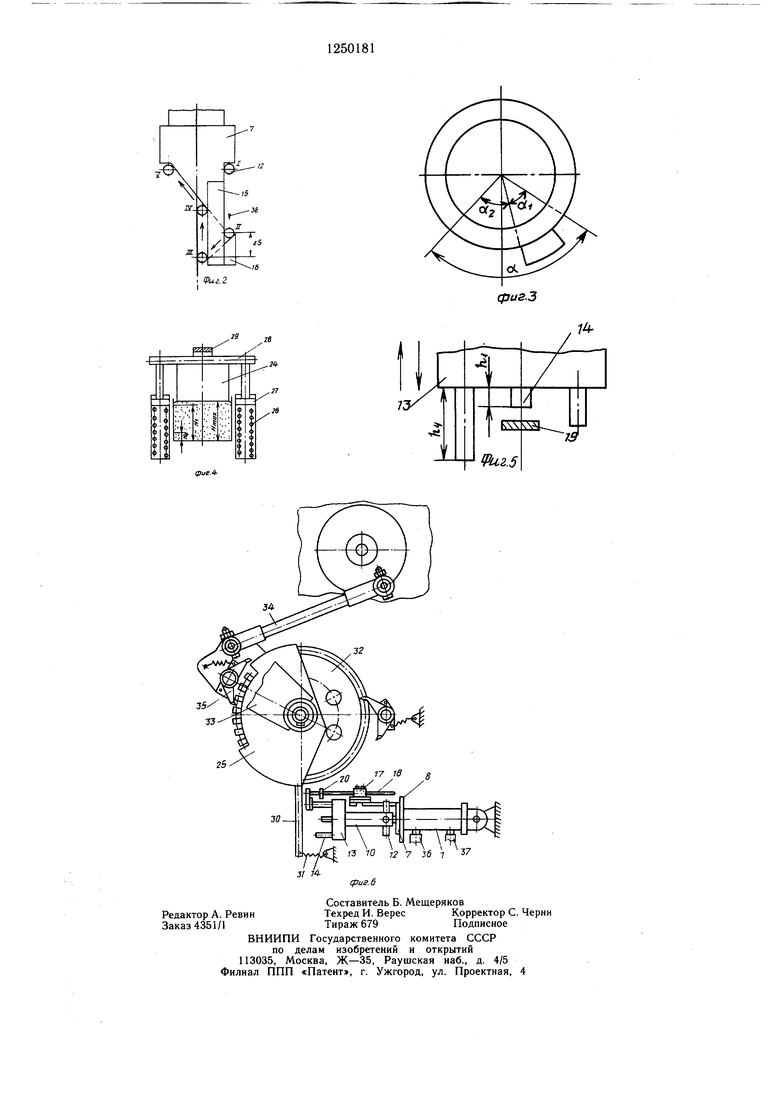
На фиг. 1 изображено устройство для управления рабочими органами машин, общий вид; на фиг. 2 - схема движения поворачивающих пальцев; на фиг. 3 - схема поворота пальцев, на фиг. 4 - заслонка с вертикальным перемещением; на фиг. 5 - схема перемещения барабана с нажимными пальцами; на фиг. 6 - схема установки устройства на кормораздатчик.
Устройство для управления рабочими органами мащин содержит гильзу цилиндра 1 с двумя штуцерами 2, поршень 3, шток 4 и головки 5 и 6 цилиндра. На передней части цилиндра 1 установлена втулка 7. Втулка 7 снабжена опорной пластиной 8 и стопорными болтами 9. На резьбовом конце штока 4 установлен опорный стакан 10 со стопором 11 и поворачивающими пальцами 12. К опорному стакану 10 крепится барабан 13 с нажимными пальца- ми 14 или сменные барабаны с торцовой рабочей поверхностью ступенчатой или винтообразной формы, или барабаны с боковой рабочей поверхностью различной формы (не показаны). На втулке 7 установлен крон- щтейн 15 с пластиной 16 и держателем 17 с фиксатором 18, на котором имеется упорная пластина 19 и буртик 20. Фиксатор 18 снабжен тормозком, состоящим из фрикционной прокладки 21, нажимной пластины 22 и регулировочных болтов 23.
Устройство крепится с помощью опор- ной пластины 8 в непосредственной близости от заслонки 24 или отсекающего кожуха 25. Заслонка 24 установлена на подпружиненных телескопических опорах, состоящих из пружин 26 и штоков 27. В зависимости от типа заслонки 24 (нормально открытая или нормально закрытая) пружины 26 располагаются или под штоками 27, или над ними. Заслонка 24 соединена с осью 28 и снабжена упором 29.
При установке устройства на кормораздатчик (не показан) к отсекающему кожуху 25 кормораздатчика крепится рычаг 30, связанный с пружиной 31, другой конец которой присоединен к кормораздатчику. Храповое колесо 32 жестко установлено на ве- дущем валу продольного транспортера кормораздатчика (не показан), на который свободно одеты отсекающий кожух 25 и поводок 33, с которым связан шатун 34 и толкающая собачка 35. Кормораздатчики аг- регатируются с трактором, от гидросисте- мы которого подводятся к цилиндру 1 устройства маслопроводы 36 и 37. Втулка 7
оканчивается направляющим упором 38, а последний палец 14 - головкой 39.
Устройство работает следующим образом.
Животные в рядах расставлены по группам с одинаковой продуктивностью или по половозрастным категориям, причем норма выдачи корма для каждой группы неодинакова. В исходном положении заслонка 24 расфиксирована и расположена от дна кормового желоба на высоте Нта. При этом барабан 13 находится в верхнем положении, а фиксатор 18 с пластиной 19 отведены вверх. В начале раздачи корма рычаг 30 переводится в положение «Опускание. Масло от распределителя гидросистемы трактора подается по маслопроводу 37 в полость А и шток 4 выходит из цилиндра 1. Барабан 13 перемещается вниз на величину хода щтока 4 - S. При этом нажимной палец 14 высотой hi через упорную пластину 19 и упор 29 перемещает заслонку 24 на высоту Hi от дна кормового желоба. Эта высота соответствует максимальной выдаче корма. При подъезде к следующей группе животных, которым надо выдавать другую норму корма, рычаг 30 переводят в положение «Опускание и после автоматического возврата рычага 30 в нейтральное положение его переводят в положение «Подъем. При положении «Опускание масло заходит в полость Б и перемещает шток 4 вверх. Одновременно один из поворачивающих пальцев 12, взаимодействуя с направляющим упором 38 втулки 7, поворачивает шток 4 вместу с барабаном 13 на угол «2. Направление поворота барабана 13 зависит от того, в какую сторону обращена дорожка направляющего упора 38. Движение штока 4 прекращается в тот момент, когда поворачивающие пальцы 12 доходят до края втулки 7. При этом один из пальцев 12 находится у вертикального участка направляющего упора 38, а другой - в конце наклонного участка. При переводе рычага 30 в положение «Подъем масло заходит в полость А и снова выводит шток 4 из цилиндра 1. На участке, соответствующем расстоянию между точками I и II шток 4 с барабаном 13 перемещаются без поворота, а на участке II-III, соответствующем ходу AS, щток 4 поворачивается на угол «1 за счет скольжения поворачивающего пальца 12 по скосу пластины 16. Предварительный поворот штока 4 при прямом ходе дает возможность при обратном ходе поворачивающий палец 12 совместить с наклонным участком направляющего упора 38. Одновременно с подходом поворачиваюиХего пальца 12 в положение III нажимной палец 14 высотой h2 переводит заслонку 24 на другую, меньшую норму выдачи корма. Заслонка 24 во время переключения удерживается в прежнем положении пластиной 19 фиксатора 18. Для того чтобы фиксатор 18 удерживал заслонку 24, тормозок необходимо отрегулировать так, чтобы сила трения фиксатора о прокладку 21 превышала упругость пружин 26. При переходе на следующую норму цилиндр 1 снова включается на прямой и обратный ход штока 4 и т. д. После окончания выдачи последней минимальной нормы корма заслонку 24 переводят в исходное положение. Для этой цели на последнем нажимном пальце 14, имеющем наибольшую вы- жимной палец 14, имеющий минимальную
соту, выполнена головка 39, которая при обратном ходе штока нажимает на буртик 20 и отводит фиксатор 18 от заслонки 24 на высоту, достаточную для подъема заслонки 24 в исходное положение. Заслонвысоту, перемещает рычаг 30 и одновременно поворачивает кожух 25, устанавливая его в положение, соответствующее заданной норме выдачи. При переходе на следующую норму выдачи гидроцилиндр 1 снова
высоту, перемещает рычаг 30 и одновременно поворачивает кожух 25, устанавливая его в положение, соответствующее заданной норме выдачи. При переходе на следующую норму выдачи гидроцилиндр 1 снова
ка 24 поднимается вверх пружинами 26. 15 включают вначале на обратный, а затем
В случае установки предлагаемого устройства на кормораздатчике типа КТУ-10 высота нажимных пальцев 14, как и в предыдущем случае, предварительно регулирует ся в зависимости от заданных норм выдачи корма различным группам животных.
20
на прямой ход. Теперь на рычаг 30 через фиксатор 18 воздействует нажимной палец 14, высота которого отрегулирована на другую норму выдачи корма. Число норм выдачи корма соответствует количеству нажимных пальцев 14.
В начале раздачи отсекаюш.ий кожух 25 пружиной 31 отведен в положение, при котором зубья храпового колеса 32 в зоне действия толкаюшей собачки 35 закрыты кожухом 25 и собачка 35 при включении вала отбора мош,ности трактора совершает холостые движения. При подъезде к кормушкам рычаг 30 переводят в положение. «Подъем, барабан 13 перемещается на величину хода штока 4. При этом нажимной палец 14, имеющий минимальную
высоту, перемещает рычаг 30 и одновременно поворачивает кожух 25, устанавливая его в положение, соответствующее заданной норме выдачи. При переходе на следующую норму выдачи гидроцилиндр 1 снова
включают вначале на обратный, а затем
на прямой ход. Теперь на рычаг 30 через фиксатор 18 воздействует нажимной палец 14, высота которого отрегулирована на другую норму выдачи корма. Число норм выдачи корма соответствует количеству нажимных пальцев 14.
Риг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочими органами машин | 1989 |
|
SU1665900A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| Кормораздатчик | 1987 |
|
SU1442152A1 |
| Кормораздатчик | 1986 |
|
SU1378803A1 |
| Раздатчик сыпучих кормов | 1989 |
|
SU1664211A1 |
| Кормораздатчик | 1974 |
|
SU656602A1 |
| КОРМОРАЗДАТЧИК | 2007 |
|
RU2337536C1 |
| Кормораздатчик | 1983 |
|
SU1115689A1 |
| КОРМОРАЗДАТЧИК | 1997 |
|
RU2123783C1 |
| Кормораздатчик-дозатор | 1988 |
|
SU1576080A1 |
.26 -
в
74
31 7
сриг.6
/3 VO ; 7 36 7 J7
Составитель Б. Мещеряков
Редактор А. РевинТехред И. ВересКорректор С. Черни
Заказ 4351/1Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| Т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Гонок для ткацкого станка | 1923 |
|
SU254A1 |
| Письменов В | |||
| Н | |||
| и др | |||
| Механизированные откормочные фермы крупного рогатого скота | |||
| М.: Россельхозиздат, 1975, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
