Изобретение относится к измерительной технике, а именно к средствам контроля винтовых поверхностей тел вращения, и является усовершенствованием известного устройства, описанного в авт. св. № 970083.
Цель изобретения - повышение точности измерения за счет учета осевого враш,ения элементов кабелей и канатов путем обеспечения компенсации угла поворота указанных элементов.
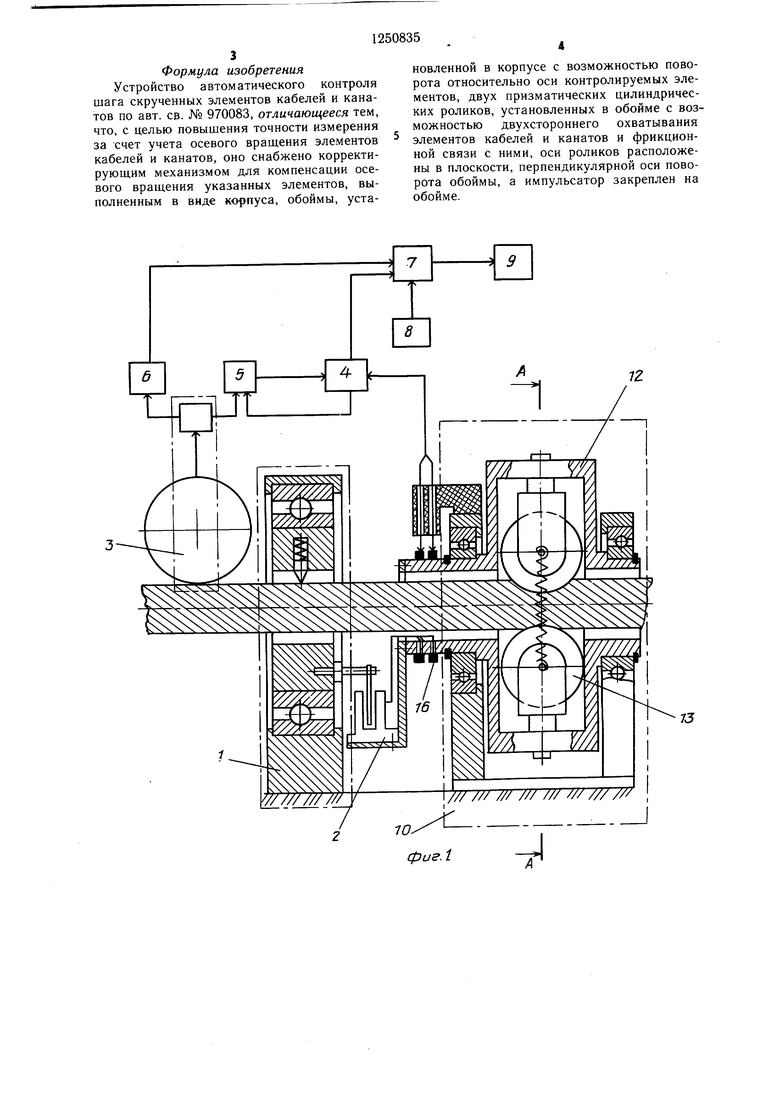
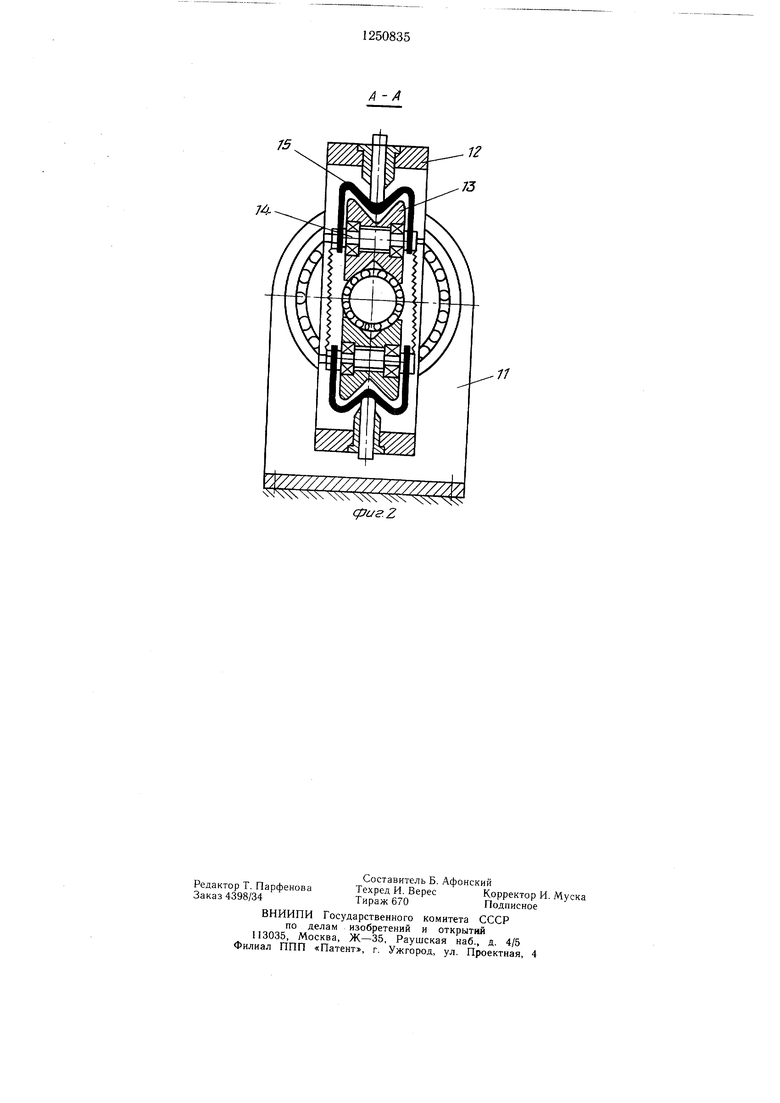
На фиг. 1 изображена принципиальная схема устройства автоматического контроля шага скрученных элементов кабелей и канатов; на фиг. 2 - разрез А-А на фиг. 1. Устройство включает в себя датчик 1 шага, выполненный в виде шупа, взаимодей- ствуюшего с межпроволочными впадинами скрученных элементов движущегося кабеля или каната, импульсатор 2, механический связанный с датчиком 1, датчик 3 длины с грубым и точным отсчетом, коммутирующий блок 4, первый и второй счетчики 5 и 6 импульсов, которые входами соединены соответственно с выходами точного и грубого отсчета датчика 3 длины, блок 7 сравнения, входы которого соединены с выходами счетчика 6 импульсов и коммутирующего блока 4, генератор 8 импульсов и регистратор 9, включенный на выходе блока 7 сравнения. Корректирующий механизм 10 для компенсации осевого вращения элементов кабелей и канатов выполнен в виде корпуса 11, обоймы 12, установленной в корпусе 11 с возможностью поворота относительно оси указанных элементов, двух призматических цилиндрических роликов 13, установленных в обойме с возможностью двухстороннего охватывания элементов кабелей и канатов и фрикционной связи с ними. Оси 14 роликов расположены в плоскости, перпендикулярной оси поворота обоймы, а импульсатор 2 закреплен на обойме 12. Эта обойма выполнена в виде прямоугольной рамки с перпендикулярными ее продольным полкам цапфами и со сквозным продольным цилиндрическим отверстием для размещения контролируемого изделия. Обойма выполнена симметричной относительно ортогональных плоскостей, проходящих через ось цапф, а две вилки 15 установлены цилиндрической частью в поперечных полках рамки таким образом, что их щеки расположены в плоскостях, параллельных оси цапф и размещены в полости обоймы 12. Сигнал с выхода импульсатора 2 снимается с помощью токопроводящих щеток 16.
Устройство работает следующим образом.
При движении изделия щуп датчика 1 щага перемещается вдоль по винтовой линии, вращаясь вокруг оси изделия. Прижатые к поверхности изделия фрикционные
ролики 13, образующие с ним фрикционный точечный контакт, вращаются вокруг своих осей 14, закрепленных в вилках 15. При отсутствии осевого вращения изделия обойма 12 вместе с роликами 13 также не испытывает принудительного вращения, так как сила трения направлена только вдоль оси движения кабеля и вместе с закрепленным на ней импульсатором 2 остается неподвижной. В случае осевого вращения изделия обойма 12 через ролики 13 и вилки 15 вращается в подшипниках, установленных в корпусе 11, и получает принудительное вращение на угол, равный углу поворота кабеля, за счет наличия тангенциальной составляющей силы трения. Вместе с обоймой поворачивается импульсатор 2 на угол, равный углу поворота изделия вокруг своей оси.
При каждом полном обороте щупа датчика 1 импульсатор 2 через токопроводящие
щетки 16 подает импульсы на вход коммутирующего блока 4. От датчика 3 длины через счетчик 6 поступает сигнал о грубом суммарном отсчете длины на вход блока 7 сравнения. На другой вход блока 7 сравнения подается сигнал о точном отсчете
длины через счетчик 5 импульсов и коммутирующий блок 4. После каждого полного оборота щупа датчика 1 шага через коммутирующий блок 4 подается сигнал сброса на счетчик 5 импульсов. К третьему
входу блока 7 сравнения подается сигнал от генератора 8 импульсов. В блоке 7 сравниваются сигналы точного отсчета длины на величину одного оборота датчика 1 шага с сигналами от генератора 8 импульсов, чем обеспечивается отсчет фактической величины щага и фиксация этого значения на сигнале отсчета длины изделия, которые с выхода блока 7 подаются на регистратор 9.
Блок 7 сравнения получает одновременно три сигнала: от счетчика 6 (грубого отсчета), от коммутирующего блока 4 - о количестве импульсов точного отсчета за один оборот датчика 1 и сигнал от генератора 8. Сравнивая эталонный сигнал от генератора 8 с переменным количеством импульсов, поступающих от коммутирующего блока 4,
блок 7 сравнения выдает на регистратор 9 фактическое значение отклонения от установленного номинального значения шага. Кроме того, в блоке 7 сравнения определяется на каждой длине изделия (по сигналу от счетчика 6 длины) индуцируемое значение отклонения шага от номинального значения и сравнивается количество импульсов от генератора 8 с количеством импульсов от счетчика 6 длины, что дает возможность судить об изменении скорости движения
изделия, которое в виде поправки учитывается в фактическом показателе отклонения, выдаваемом в блок регистратора 9.
Формула изобретения Устройство автоматического контроля шага скрученных элементов кабелей и канатов по авт. св. № 970083, отличающееся тем, что, с целью повышения точности измерения за счет учета осевого вращения элементов кабелей и канатов, оно снабжено корректирующим механизмом для компенсации осевого вращения указанных элементов, выполненным в виде корпуса, обоймы, установленной в корпусе с возможностью поворота относительно оси контролируемых элементов, двух призматических цилиндрических роликов, установленных в обойме с возможностью двухстороннего охватывания элементов кабелей и канатов и фрикционной связи с ними, оси роликов расположены в плоскости, перпендикулярной оси поворота обоймы, а импульсатор закреплен на обойме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля шага скрученных элементов кабелей и канатов | 1979 |
|
SU970083A1 |
| Устройство для измерения длины движущегося изделия | 1978 |
|
SU718695A1 |
| Устройство для измерения длины движущегося изделия | 1979 |
|
SU872945A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| Способ разнонаправленной скрутки проволочных изделий и устройство для его осуществления | 1985 |
|
SU1356546A1 |
| Способ измерения длины каротажного кабеля и устройство для его осуществления | 1987 |
|
SU1516752A1 |
| Способ измерения длины движущегося нитевидного изделия и устройство для его реализации | 1978 |
|
SU737778A1 |
| Устройство для измерения длины движущихся объектов | 1976 |
|
SU708140A1 |
| Устройство для измерения длины кабеля | 1985 |
|
SU1335682A1 |
| Устройство для программного управления фигурным фацетированием | 1982 |
|
SU1073081A1 |
Изобретение относится к измерительной технике, а именно к средствам измерения шага винтовой поверхности, например шага скрученных элементов кабелей и канатов и является усовершенствованием известного устройства по авт. св. № 970083. Цель дополнительного изобретения - повышение точности измерения за счет учета осевого вращения элементов кабелей и канатов путем введения компенсации угла поворота указанных элементов. Для этого устройство снабжено корректирующим механизмом для компенсации осевого вращения, выполненным в виде корпуса, обоймы, установленной в корпусе с возможностью поворота, двух призматических фрикционных роликов, установленных в обойме и охватывающих контролируемое изделие, причем импульсатор закреплен на обойме. В случае осевого вращения контролируемого кабеля он увлекает за собой обойму, а следовательно и установленный на ней импульсатор. Сигнал, вызванный доворотом импульсатора, используется для введения поправки в блок сравнения, в котором сравниваются сигналы точного отсчета длины на величине оборота датчика шага с сигналами от генератора импульсов, чем обеспечивается отсчет фактической величины щага. 2 ил. i (Л to ел о 00 оо ел N3
72
/// /// /// /// /// /////////
фигЛ
15
Редактор Т. Парфенова Заказ 4398/34
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель Б. Афонский Техред И. ВересКорректор И. Муска
Тираж 670Подписное
| Устройство автоматического контроля шага скрученных элементов кабелей и канатов | 1979 |
|
SU970083A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
