Изобретение относится к измерителной технике и может быть использовано для преобразования в электрически сигнал малых угловых отклонений объекта от его исходного положения.
Цель изобретения - повышение точности путем повьпчения разрешающей способности датчика и уменьшения реактивного момента тяжения.
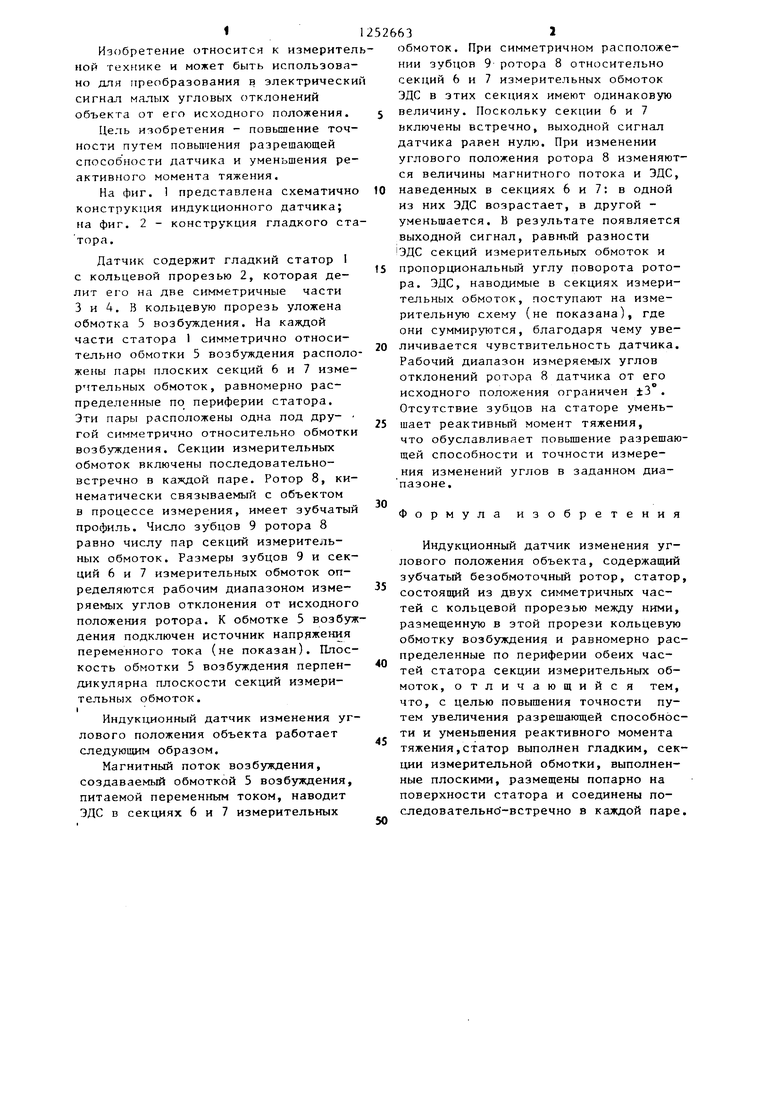
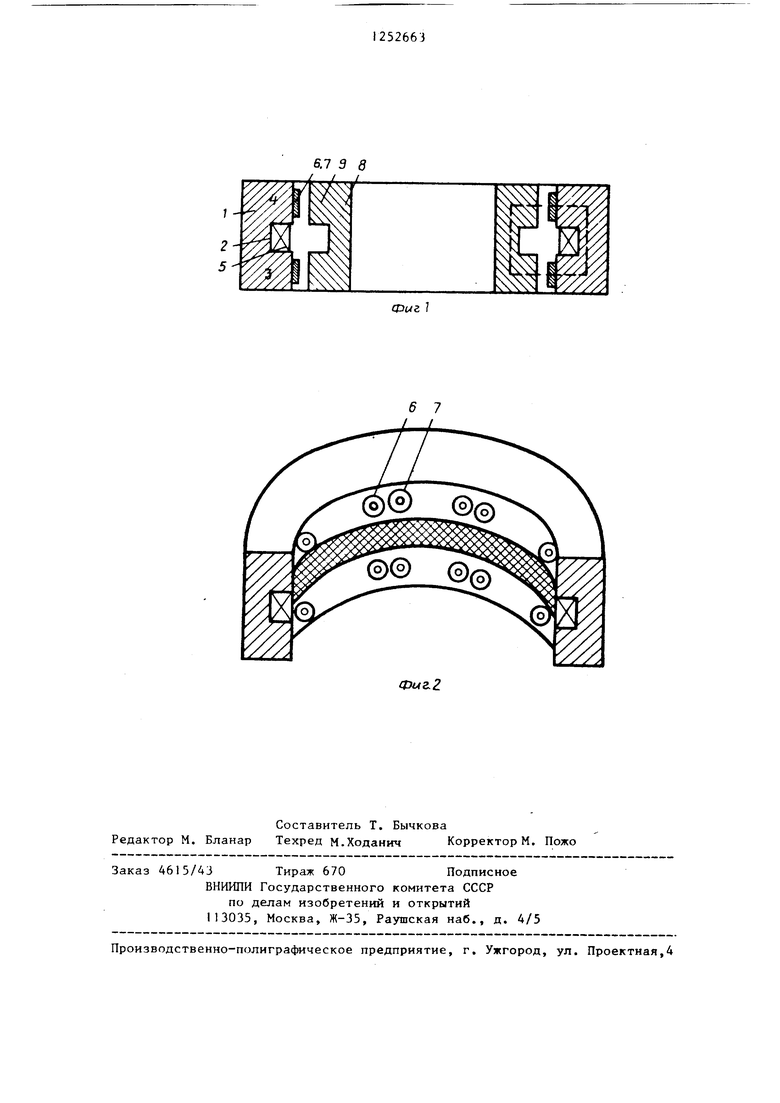
На фиг. 1 представлена схематично конструкция индукционного датчика; на фиг. 2 - конструкция гладкого ста тора.
Датчик содержит гладкий статор I с кольцевой прорезью 2, которая делит его на две симметричные части 3 и 4. В кольцевую прорезь уложена обмотка 5 возбуждения. На каждой части статора 1 симметрично относительно обмотки 5 возбуждения расположены пары плоских секций 6 и 7 измерительных обмоток, равномерно распределенные по периферии статора. Эти пары расположены одна под дру- гой симметрично относительно обмотки возбуждения. Секции измерительных обмоток включены последовательно- встречно в каждой паре. Ротор 8, кинематически связываемый с объектом в процессе измерения, имеет зубчатый профиль. Число зубцов 9 ротора 8 равно числу пар секций измерительных обмоток. Размеры зубцов 9 и секций 6 и 7 измерительных обмоток определяются рабочим диапазоном изме- ряемых углов отклонения от исходного положения ротора. К обмотке 5 возбуждения подключен источник напряжения переменного тока (не показан). Плоскость обмотки 5 возбуждения перпеи- дикулярна плоскости секций измерительных обмоток.
Индукционный датчик изменения углового положения объекта работает следующим образом.
Магнитный поток возбуждения, создаваемый обмоткой 5 возбуждения, питаемой переменным током, наводит ЭДС в секциях 6 и 7 измерительных
15
20
5
10
5 0
25
0
5
0
обмоток. При симметричном расположении зубцов 9 ротора 8 относительно секций 6 и 7 измерительных обмоток ЭДС в этих секциях имеют одинаковую величину. Поскольку секции 6 и 7 включены встречно, выходной сигнал датчика равен нулю. При изменении углового положения ротора 8 изменяются величины магнитного потока и ЭДС, наведенных в секциях 6 и 7; в одной из них ЭДС возрастает, в другой - уменьшается. В результате появляется выходной сигнал, равнъпй разности ЭДС секций измерительных обмоток и пропорциональный углу поворота ротора. ЭДС, наводимые в секциях измерительных обмоток, поступают на измерительную схему (не показана), где они суммируются, благодаря чему увеличивается чувствительность датчика. Рабочий диапазон измеряемых углов отклонений ротора 8 датчика от его исходного положения ограничен ±3 . Отсутствие зубцов на статоре уменьшает реактивный момент тяжения, что обуславливает повышение разрешающей способности и точности измерения изменений углов в заданном диа- пазоне.
Формула изобретения
Индукционный датчик изменения углового положения объекта, содержащий зубчатый безобмоточный ротор, статор, состоящий из двух симметричных частей с кольцевой прорезью между ними, размещенную в этой прорези кольцевую обмотку возбуждения и равномерно распределенные по периферии обеих частей статора секции измерительных обмоток, отличающийся тем, что, с целью повышения точности путем увеличения разрешающей способности и уменьшения реактивного момента тяжения,статор выполнен гладким, секции измерительной обмотки, выполненные плоскими, размещены попарно на поверхности статора и соединены по- следовательно -встречно в каждой паре.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1986 |
|
SU1315792A2 |
| Датчик угла поворота | 1987 |
|
SU1506268A1 |
| Преобразователь угловых перемещений | 1984 |
|
SU1226034A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| Преобразователь угловой скорости | 1982 |
|
SU1105818A1 |
| Трансформаторный датчик угла | 1988 |
|
SU1610246A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
| Двухканальный трансформаторный датчик угловых перемещений | 1977 |
|
SU662951A1 |
| Трансформаторный датчик перемещений | 1989 |
|
SU1753246A1 |
Изобретение относится к измерительной технике и может быть использовано для преобразования в электрический сигнал малых угловых отклонений объекта от его исходного положения, позволяя получить высокую точность измерения путем увеличения разрешающей способности и уменьшения реактивного момента тяжения между статором и ротором индукционного датчика. Датчик содержит гладкий статор с кольцевой прорезью в его середине, в которую уложена обмотка возбуждения, питаемая напряжением переменного тока. Симметрично относительно обмотки возбуждения расположены на статоре пары секций измерительных обмоток, равномерно распределенные по его периферии. Секции измерительных обмоток включены встречно в каждой паре. Ротор, кинематически связываемый с объектом в процессе измерения, имеет зубчатый профиль. Число зубцов ротора равно числу пар секций измерительной обмотки. При отклонении ротора от исходного положения ЭДС в секциях измерительных обмоток изменяются: в одной из них ЭДС возрастает, а в другой - уменьшается, благодаря чему на выходе датчика пояйляет- ся разностный сигнал, пропорциональный отклонению объекта перемещения от первоначального положения в рабочем диапазоне измерения, равном +3 . 2 ил. (Л
Фиг.г
| Двухкоординатный датчик угла | 1979 |
|
SU838317A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрические преобразователи угла с электрической редукцией | |||
| Под ред | |||
| Ахметжанова А.А | |||
| М.: Энергия, 1978, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
