(54)ДВУХКООРДИНАТИЫЙ ДАТЧИК УГЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| Двухкоординатный датчик угла | 1985 |
|
SU1262274A1 |
| Двухкоординатный индуктивный датчик угла поворота | 1990 |
|
SU1805284A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК | 1971 |
|
SU294074A1 |
| Двигатель с катящимся дисковым ротором | 1988 |
|
SU1561166A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| Шестикоординатный датчик нагрузки | 1982 |
|
SU1016713A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Устройство для измерения изгибающих сил и моментов, действующих на вращающий вал | 1976 |
|
SU655916A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
Изобретение относится к измерительной технике, в частности к устройствам, преобразующим угловое перемещение в пропорциональный элект рический сигнал, и может быть использовано в навигационной технике, в частности в гидроприборах. Известны двухкоординатные датчики угла, содержащие статор с диаметраль но расположенными на стержнях магнит провода сосредоточенными катушками индуктивности, и вращающийся ротор, выполненный в виде шарового сегмента и подвижный относительно осей, ортогональных оси его вращенияр Недостатками этих устройств являю ся сложность конструкции статора и ротора, значительный уровень помех, определяемых паразитной модуляцией электрического сигнала вращающимся ротором, малая помехозащищённость от внешних электромагнитных полей и сравнительно большие габариты. Наиболее близким к изобретению является двухкоординатный датчик угла, содержащий неподвижныйстатор,закрепленные на статоре диаметрально противоположно по двум осям координат парные катушки индуктивности и вращанидийся кольцевой ротор, установленный с возможностью смещения в плоскостях, перпендикулярных его оси вращения, сея зывае1«1Й с контропируемым объектом в процессе измерения. Статор этого датчика выполиен в виде кольцевого магнитопровода с четьфьмя торцовыми выступами на поверхности,обращенной к ротору, на каждом из которых устаиовлена сосредоточенная катушка индуктивнос1« Недостатка в{ данного датчика являются наличие погрешности,обусловленной локальным зонцированием сосредоточенной на ферромагнитном выступе статора катушки индуктивности вращающегося ротора и связанной как с неоднородностью магнитных свойств,так;
с неплоскостностью последнего, плоая помехозащищенность от влияния нешних магнитных полей и сравнительно большие габариты, обусловленные азмещением катушки индуктивности на ыступах статора.
Цель изобретения - увеличение помехозащищенности и уменьшение габаитов датчика.
Эта цель достигается тем, что на торцовой поверхности статора, обращенной к ротору, выполнены глухие цилиндрические отверстия, центры которых расположены по окружности на осях координат и между ними, катушки индуктивности выполнены в виде ряда плоских секций, установленных в этих отверстиях,а секции,находящиеся вотверстиях попарно симметрично расположенных относительно координатных сей,соединены между собой последовательно-согласно.
Высота плоских секций катушек индуктивности равна глубине глухих отверстий статора.
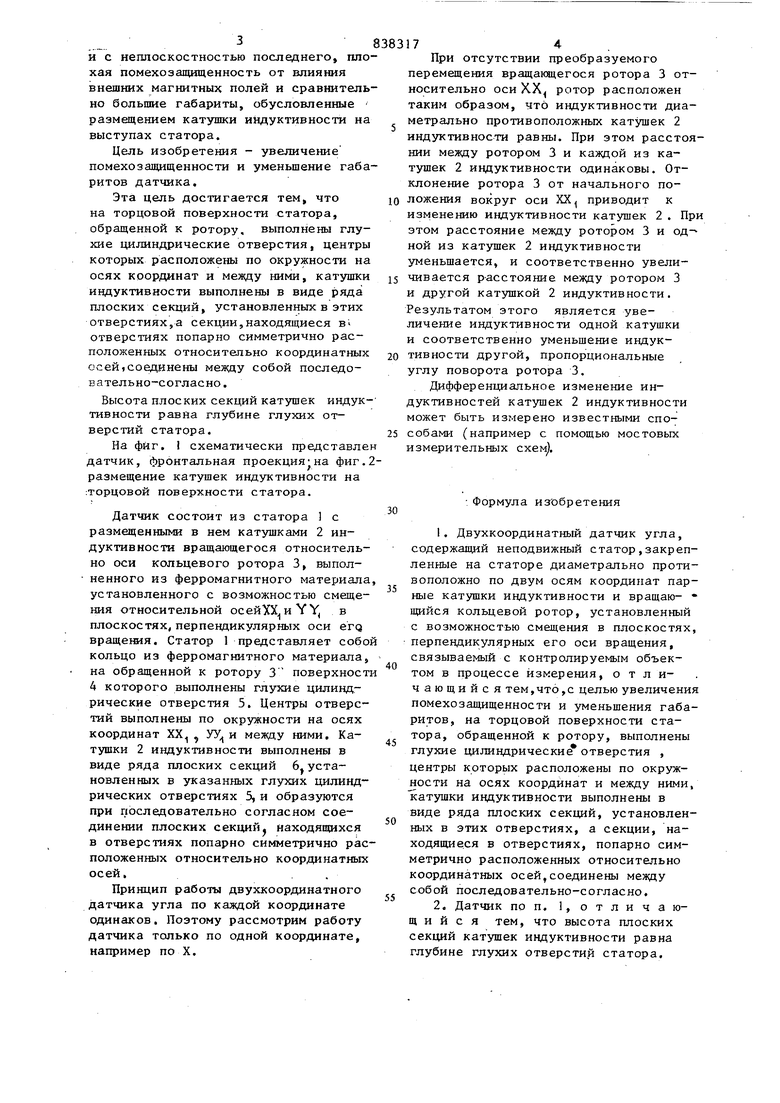
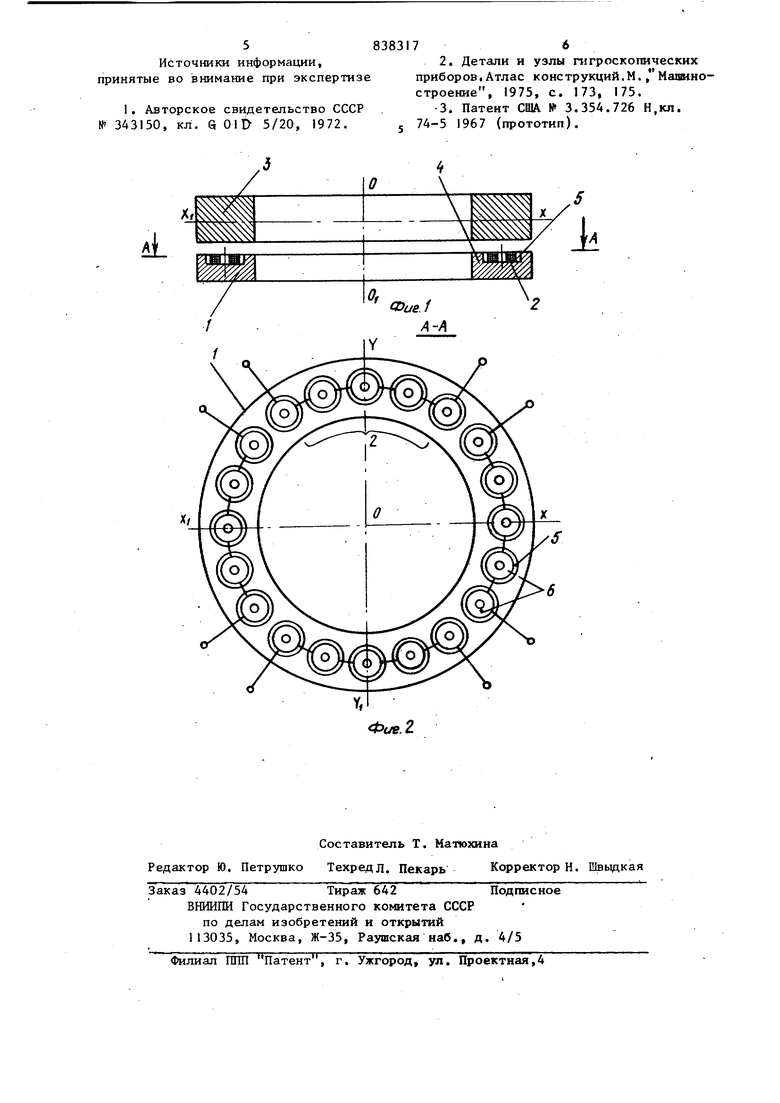
На фиг. 1 схематически представлен атчик, фронтальная проекция на фиг.2размещение катушек индуктивности на торцовой поверхности статора.
Датчик состоит из статора 1 с размещенными в нем катушками 2 индуктивности вращающегося относительно оси кольцевого ротора 3, выполненного из ферромагнитного материала, установленного с возможностью смещения относительной осейХХ. иУУ в плоскостях, перпендикулярных оси erq вращега1я. Статор 1 представляет собой кольцо из ферромагнитного материала, на обращенной к ротору 3 поверхности 4 которого выполнены глухие цилиндрические отверстия 5. Центры отверстий выполнены по окружности на осях координат ХХ УУ и мезвду ними. Катушки 2 индуктивности выполнены в виде ряда плоских секций 6 установленных в указанных глухих цилиндрических отверстиях 5, и образуются при последовательно согласном соединении плоских секцийJ находящихся в отверстиях попарно симметрично расположенных относительно координатных осей.,
Принцип работы двухкоординатного датчика угла по каждой координате одинаков. Поэтому рассмотрим работу датчика только по одной координате, например по X.
При отсутствии преобразуемого перемещения вращак«цегося ротора 3 относительно оси ХХ ротор расположен таким образом, что индуктивности диаметрально противоположных катушек 2 индуктивности равны. При этом расстоянии мелщу ротором 3 и каждой из катушек 2 индуктивности одинаковы. Отклонение ротора 3 от начального положения вокруг оси XX приводит к изменению индуктивности катушек 2 . При этом расстояние между ротором 3 и одной из катушек 2 индуктивности уменьшается, и соответственно увеличивается р-асстояние между ротором 3 и другой катушкой 2 индуктивности.
Результатом этого является увеличение индуктивности одной катушки и соответственно уменьшение индуктивности другой, пропорциональные углу поворота ротора 3.
Дифференциальное изменение индуктивностей катушек 2 индуктивности может быть измерено известными способами (например с помощью мостовых измерительных схем.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
-3. Патент США № 3.354.726 Н.кл. 74-5 1967 (прототип).
dl.
