Изобретение относится к иямерн-- тельной технике и может быть использовано в электроизмерительных приборах электромагнитной системы с плоской катушкой, работающих в условиях механических воздействий и ударов..
Цель изобретения - повышение виброустойчивости механизма за счет автокомпенсации погрешности измерения, возникающей при воздействии вибрации.
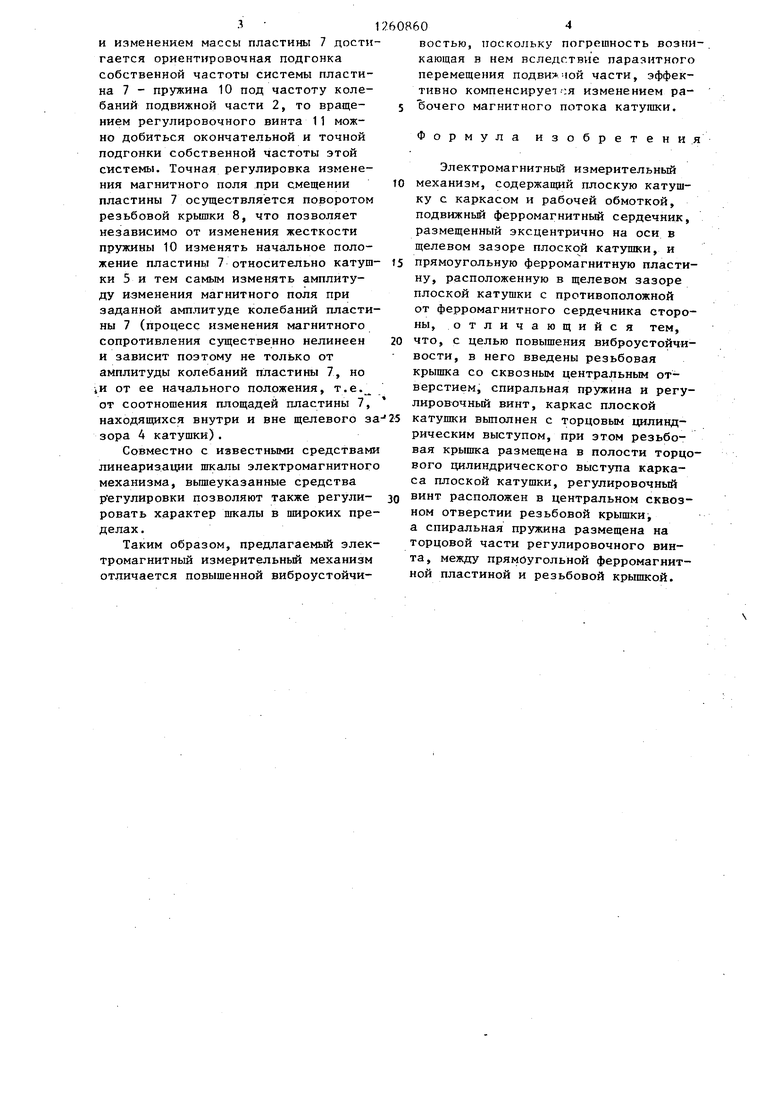
На фиг. 1 изображен электромагнитный измерительный механизм, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1 (с местным разрезом катушки в месте установки компенсатора колебаний, противоположная от сердечника сторона катушки).
Электромагнитный измерительный механизм состоит из эксцентрично укрепленного на оси 1 подвижной части 2 ферромагнитного сердечника 3, расположенного в щелевом зазоре 4 плоской каркасной катушки 5 с рабочей обмоткой и каркасом 6, и прямоугольной ферромагнитной пластины 7, введенной, в щелевой зазор 4 катушки 5 с противоположной от сердечника 3 стороны и упруго закрепленной в резьбовой крышке 8 на выступе 9 каркаса 6 катушки 5 с помощью спиральной пружины 10, навернутой обращенным к крышке 8 концом на установленный в резьбовой крышке 8 регулировочный винт 11. При этом винт 11 расположен в центральном отверстии 12 крышки В.
Прямоугольная ферромагнитная пла.стина 7, как и сердечник 3, из-- готовлена из пермаллоя и приварена (правым на фиг. 2 концом) к левому концу пружины 10J правый конец кото- рок навернут .на винт 1 1 и приварены к крышке 8. Выступ 9 в.ыполнен путем приклейки к правому торцу каркаса 6 пластмассовой втулки с резьбовым отверстием под крышку 8.
Электромагнитный измерительный механизм работает следующим образом
При прохождении тока по рабочей обмотке катушки 5 сердечник 3 втягивается в щелевой зазор 4. При наличии противодействующет о момента угол поворота подвиж}юй части буд.ет пропорщюнален величине тока в обмоке катушки .5.
20
2608602
Под действием пиСфации подвижная часть 2 за счет сильлой связи поперечной и крутильной координат, обусловленной эксцентричным расположе- 5 кием сердечника 3, начинает совершать резонанс ые колебания, при которых сердечник 3 совершает паразитные колебания.вдоль оси катушки 5. При этом упруго закрепленная ферро- 10 магнитная пластина 7 начинает колебаться синхронно с сердечником 3, что обеспечивается регулировкой.
При резонансе подвижной части 2 сразу же возникает и резонанс упру- 5 гой системы пластина 7 - пружина 10, причем колебания (за счет тщательной регулировки) происходят строго синфазно. При смещении сердечника 3, например, вправо вдоль катушки 5, сопровождающемся возникновением положительной погрешности от вибрации, пластина 7 также смещается вправо. При этом уменьшается ее площадь, находящаяся в зазоре 4 катушки 5, соответственно увеличивается полное магнитное сопротивление цепи и уменьшается индyкция в рабочем зазоре 4, в результате чего уменьшается сила, втягивающая сердечник 3 в щелевой
30 зазор 4 катушки 5. Это приводит к возникновению отрицательной погрешности измерения, компенсирующей при соответствующей настройке положительную погрешность от вибрации. При
35 паразитном смещении сердечника влево процесс компенсации повторяется. Для полной ком:пенсации необходимо обеспечить возможность точной регулировки как собственной частоты плас40 тины 7 на пружине 10, так и величины возникающего при .ее смеп(ении изменения магнитного поля, необходимого для компенсации паразитного отклонения сердечника 3 при вибра45 ции.
25
В предлагаемом электромагнитном измерительном механизме предусмотрена возможность не только предварительной настройки этих параметров, осуществляемой в процессе изготовления прибора (подбор толщины, высоты и длины входящей в зазор 4 части пластины 7), но и возможность окончательной регулировки степени компенсации после сборки измерительного .механизма. Если в процессе изготовления изменением жесткости спиральной пружины 10 в осевом направлении
и изменением массы пластины 7 достигается ориентировочная подгонка собственной частоты системы пластина 7 - пружина 10 под частоту колебаний подвижной части 2, то враще- нием регулировочного винта 11 можно добиться окончательной и точной подгонки собственной частоты этой системы. Точная регулировка изменения магнитного поля при смещении пластины 7 осзш1ествляётся поворотом резьбовой крышки 8, что позволяет независимо от изменения жесткости пружины 10 изменять начальное положение пластины 7 относительно катуш- ки 5 и тем самым изменять амплитуду изменения магнитного поля при заданной амплитуде колебаний пластины 7 (процесс изменения магнитного сопротивления существенно нелинеен и зависит поэтому не только от амплитуды колебаний пластины 7, но iK от ее начального положения, т.е. от соотношения площадей пластины 7, находящихся внутри и вне щелевого за зора 4 катушки).
Совместно с известными средствами линеаризации шкалы электромагнитного механизма, вьппеуказанные средства р егулировки позволяют также регули- ровать характер шкалы в широких пределах .
Таким образом, предлагаемый электромагнитный измерительньй механизм отличается повышенной виброустойчивостью, поскольку погрешность возникающая в нем вследствие паразитного перемещения подви-л юй части, эффективно компенсируется изменением ра- Ъочего магнитного потока катушки.
Формула изобретени
Электромагнитный измерительный механизм, содержащий плоскую катушку с каркасом и рабочей обмоткой, подвижный ферромагнитный сердечник, размещенный эксцентрично на оси в щелевом зазоре плоской катушки, и прямоугольную ферромагнитную пластину, расположенную в щелевом зазоре плоской катушки с противоположной от ферромагнитного сердечника стороны, отличающийся тем, что, с целью повышения виброустойчивости, в него введены резьбовая крышка со сквозным центральным отверстием, спиральная пружина и регулировочный винт, каркас плоской катушки выполнен с торцовым цилиндрическим выступом, при этом резьбовая крышка размещена в полости торцового цилиндрического выступа каркаса плоской катушки, регулировочный винт расположен в центральном сквозном отверстии резьбовой крышки, а спиральная пружина размещена на торцовой части регулировочного винта, между прямоугольной ферромагнитной пластиной и резьбовой крышкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный измерительный механизм | 1985 |
|
SU1291882A1 |
| Электромагнитный прибор | 1986 |
|
SU1383208A1 |
| Электромагнитный измерительный механизм | 1988 |
|
SU1597738A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| Электромагнитный амперметр | 1985 |
|
SU1291883A1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2001 |
|
RU2192684C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ НЕМАГНИТНЫХ ПОКРЫТИЙ НА ФЕРРОМАГНИТНЫХ ИЗДЕЛИЯХ | 1999 |
|
RU2160427C2 |
| Электроизмерительный прибор с прямолинейной шкалой | 1988 |
|
SU1661841A1 |
| КОЛЕБАТЕЛЬНЫЙ СТРУКТУРОМЕТР | 2016 |
|
RU2625535C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2037769C1 |

Изобретение может быть использовано в электроизмерительных приборах электромагнитной системы с плоской катушкой, работакицих в условиях механических воздействий и ударов. Иель изобретения - повышение виброустойчивости механизма, достигается за счет автокомпенсации погрешности измерения, возникающей при воздействии вибрации. Для зтого в электромагнитный измерительный механизм дополнительно введены резьбовая крышка 8 со сквозным центральным отверстием 12, спиральная пружина 10 и регулировочный винт 11. На чертеже также показаны ферромагнитный сердечник 3, эксцентрично укрепленный на оси 1, расположенный в щелевом зазоре 4 плоской каркасной катушки 5 с рабочей обмоткой и каркасом 6, прямоугольная ферромагнитная пластина 7, выступ 9. В предложенной конструкции механизма погрешность, возникающая в нем вследствие паразитного перемещения подвижной части, эффективно компенсируется изменением рабочего ма1гнитного потока, катушки. 2 ил. (Л ffaff/l 97(/г,2
Редактор А.Ревин
Составитель Шумилишская Техред А.Кравчук ,
5225/45
Тираж 728Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раурская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор М.Самборская
| Электроизмерительный прибор с подвижной частью на растяжках | 1974 |
|
SU540217A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аналоговые электроизмерительные приборы./Под ред | |||
| А.А | |||
| Преображенского | |||
| М.: Высшая школа, 1979, с | |||
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
