Изобретение относится к измерительной технике и может быть использовано для контроля вибраций и перемещения узлов различного оборудования, например в химической промышленности, на атомных электростанциях, а также на объектах с вредными условиями труда.
Известен датчик относительных перемещений [1] содержащий цилиндрический корпус, размещенные в нем две дифференциально соединенные обмотки, установленный с возможностью перемещения относительно них ферромагнитный сердечник, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник. Обмотки включены в плечи моста Уинстона. Сигнал моста усиливается и затем выпрямляется. Датчик может быть использован для дистанционных измерений, однако калибровка его требует присутствия обслуживающего персонала, что не всегда возможно при работе в опасных зонах.
Наиболее близким техническим решением к изобретению является датчик линейных перемещений [2] содержащий корпус, размещенные в нем две дифференциально соединенные обмотки, установленный с возможностью перемещения относительно них ферромагнитный сердечник, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник, электромагнитный калибратор, выполненный в виде ферромагнитного якоря и закрепленной на штоке катушки, и размещенный внутри штока реверсивный подшипник. Обе обмотки включены в плечи моста Уинстона. Сигнал моста усиливается и затем выпрямляется.
Поскольку калибратор содержит установленный в реверсивном подшипнике ферромагнитный якорь, связанный с магнитным сердечником, влияющим на изменение индуктивности обмоток датчика перемещения (во время процесса измерений магнитный сердечник фиксируется по отношению к контактному наконечнику постоянным магнитом, протяжение которого во время процесса калибровки преодолевается притяжением электромагнита), то магнитный сердечник перемещается на известную фиксированную величину в осевом направлении по отношению к контактному наконечнику и обеспечивает при калибровке изменение сигнала, которое соответствует известному фиксированному смещению.
Благодаря использованию датчика с подобным калибратором необходимость нахождения обслуживающего персонала в опасных зонах исключается. Однако конструкция датчика излишне сложна и не обеспечивает контроль работоспособности его механической части.
Задача изобретения упрощение конструкции и повышение надежности за счет получения дополнительной информации о состоянии части датчика и надежности контакта с объектом контроля.
Это достигается тем, что датчик линейных перемещений, содержащий корпус, размещенные в нем две дифференциально соединенные обмотки, установленный с возможностью перемещения относительно них ферромагнитный сердечник, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник, электромагнитный калибратор, выполненный в виде ферромагнитного якоря и закрепленной на штоке катушки, размещенный внутри штока реверсивный подшипник, согласно изобретению ферромагнитный сердечник датчика закреплен на штоке, а контактный наконечник соединен с якорем калибратора, установлен в реверсивном подшипнике и выполнен с грибкообразной головкой, взаимодействующей со свободным торцом штока своей плоской частью.
Целесообразно для повышения удобства эксплуатации соединение между контактным наконечником и якорем калибратора выполнить с возможностью регулирования расстояния между ними.
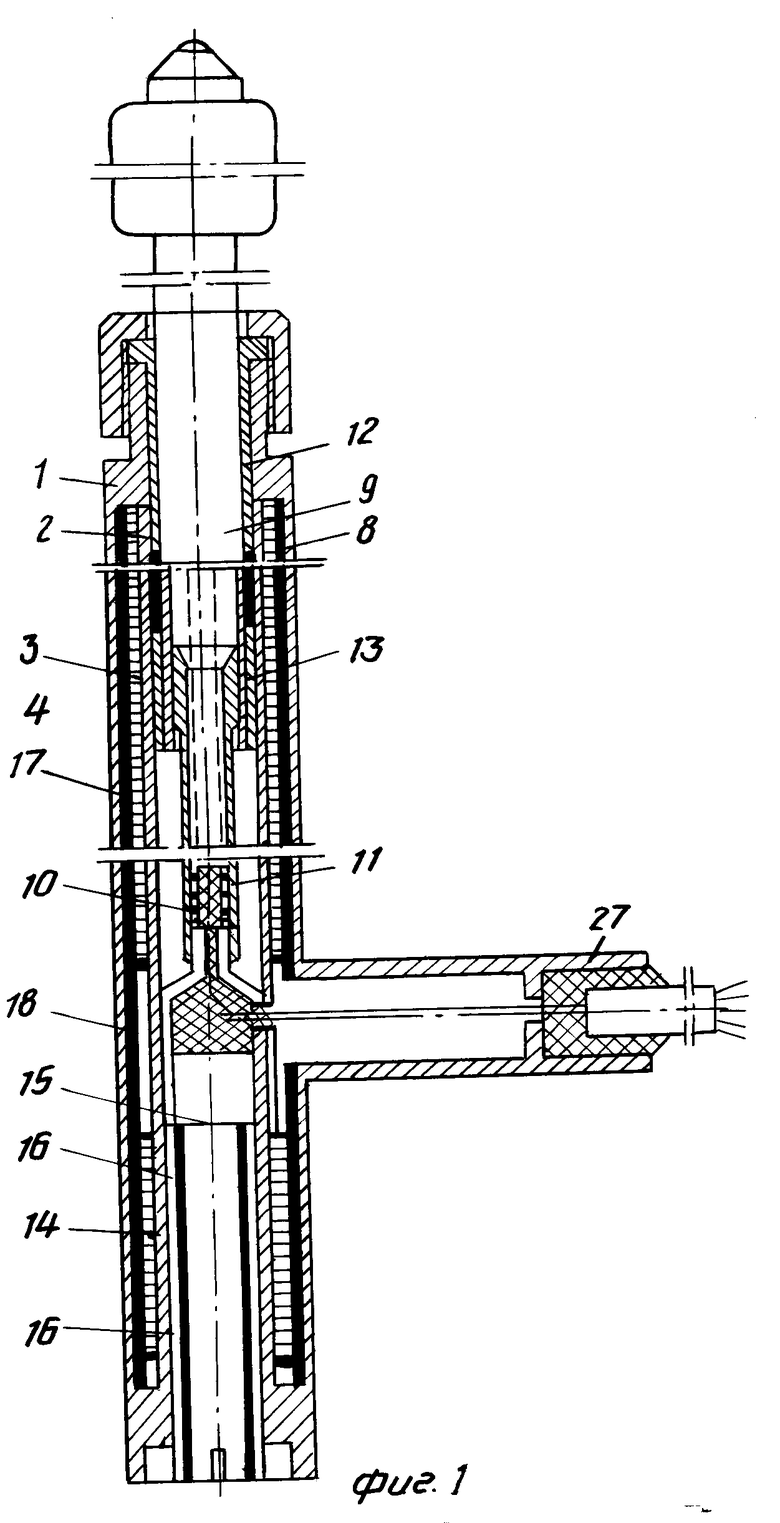
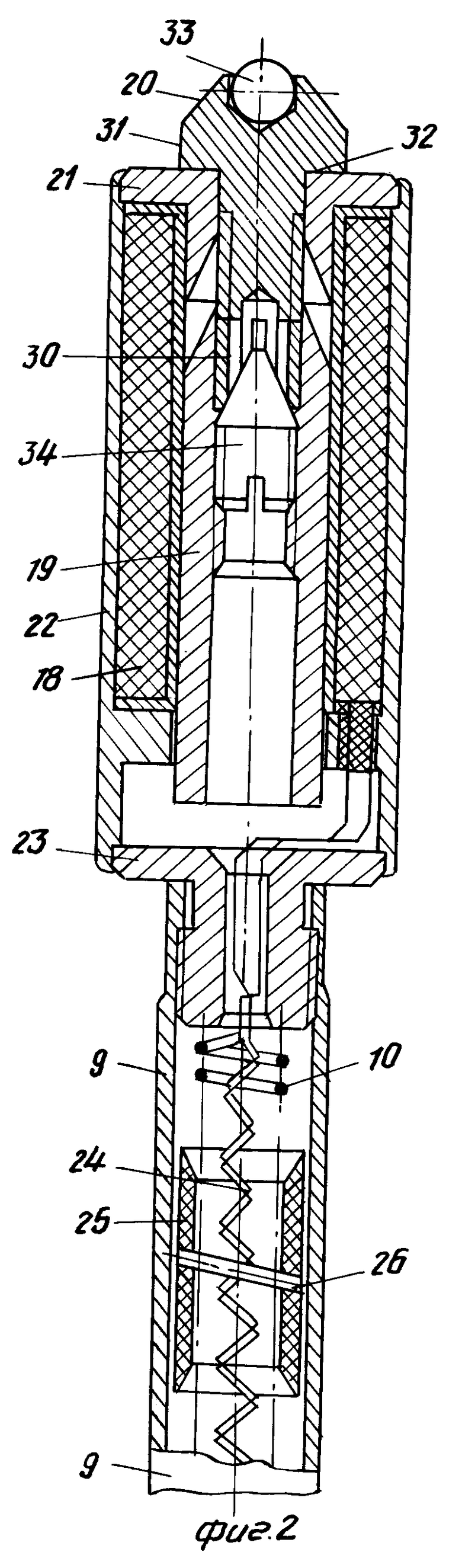
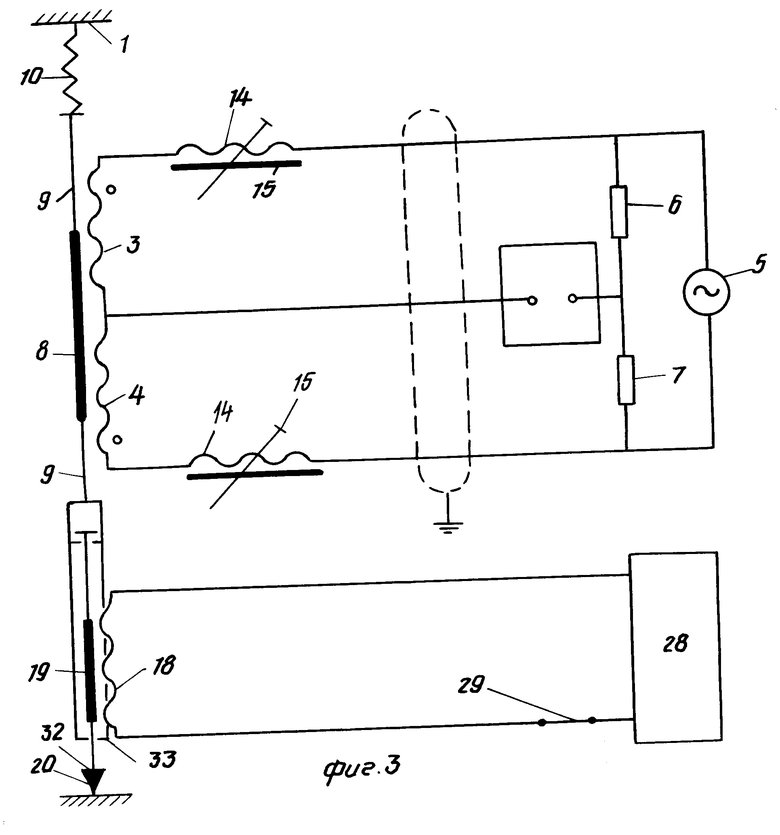
На фиг. 1 изображен датчик линейных перемещений, общий вид в разрезе; на фиг. 2 калибратор датчика линейных перемещений, общий вид в разрезе; на фиг. 3 принципиальная электрическая схема соединений датчика линейных перемещений.
Датчик линейных перемещений (фиг.1) содержит корпус 1, внутри которого на каркасе 2 размещены две дифференциально соединенные обмотки 3, 4, которые подключены по схеме индуктивного полумоста к генератору несущей частоты 5 (фиг. 3) и дополнены в нем парой одинаковых прецизионных сопротивлений 6 и 7 до полного моста.
Внутри каркаса 2 обмоток 3, 4 размещен ферромагнитный сердечник 8, надетый на выдвижной шток 9, подпружиненный цилиндрической витой пружиной 10 относительно корпуса. Пружина 10 одним торцом закреплена в стакане-держателе 11, размещенном внутри корпуса, а другим торцом прикреплена к штоку 9.
Ферромагнитный сердечник 8 является одновременно ограничителем хода штока 9, поскольку его наружный торец взаимодействует с подшипником 12, закрепленным на торце корпуса. Второй торец ферромагнитного сердечника 8 соседствует с подшипником 13, который надет на шток 9 и обеспечивает его перемещение внутри каркаса 2. На каркасе размещены также две катушки 14 с сердечником 15, служащие для настройки моста. Сердечник 15 выполнен в виде винта, который может перемещаться в резьбе 16 каркаса 2.
Для исключения влияния внешних магнитных полей измерительные обмотки 3, 4 и катушки 14 снабжены экраном 17. Стенки каркаса 2 и корпуса 1 образуют между сбой герметичную полость, в которой находятся обмотки 3, 4 и катушки 14. На штоке 9 со стороны свободного торца закреплена катушка 18 калибратора, внутри которой размещен с возможностью перемещения ферромагнитный якорь 19 калибратора, связанный с контактным наконечником 20, установленный в реверсивном подшипнике 21. Катушка 18 размещена в кожухе 22, соединенном с торцом штока 9 при помощи резьбовой втулки 23, служащей также упором и узлом крепления пружины 10.
Токоподводы 24 калибровочной катушки 18 размещены внутри штока 9 и пружины 10 с помощью втулок 25, которые штифтами 26 зафиксированы относительно пружины 10 и могут перемещаться относительно внутренних стенок штока 9. Токоподводы 24 выведены через стакан-держатель 11 пружины 10 и боковые герметизированные отверстия корпуса, экрана 17, а также штуцер 27. Катушка 18 соединена со стабилизированным источником 28 питания при помощи калибровочного ключа 29. Ферромагнитный якорь 19 выполнен в виде втулки, размещенной в катушке 18 с возможностью осевого перемещения, и соединен с контактным наконечником 20 при помощи резьбового соединения. Контактный наконечник выступает из кожуха 22 и представляет собой стержень, размещенный в реверсивном подшипнике 21, с грибкообразным выступом 31.
Тыльная часть 32 грибкообразного выступа взаимодействует с реверсивным подшипником 21, закрепленным на торце кожуха 22,и служит ограничителем хода ферромагнитного якоря 19 и контактного наконечника 20. На вершине грибкообразного выступа 31 закреплен шарик 33. Резьбовое соединение 30 контактного наконечника 20 и ферромагнитного якоря 19 обеспечивает их совместное перемещение, а также возможность регулировки их положения. Фиксация относительного положения контактного наконечника 20 и ферромагнитного якоря 19 обеспечивается расклинивающим конусом 34.
Вторым ограничителем перемещения контактного наконечника 20 служит тыльная часть реверсивного подшипника 21 и коническая часть ферромагнитного якоря 20. Именно на величину зазора между тыльной частью реверсивного подшипника 21 и конической частью ферромагнитного якоря 19 может выступать из кожуха 22 контактный наконечник 20. Этот зазор контролируется при необходимости с помощью щупов, которые вводятся в зазор между тыльной частью 32 грибкообразного выступа 31 и наружным торцом реверсивного подшипника 21.
Устройство работает следующим образом.
Корпус 1 датчика линейных перемещений крепится к неподвижной базе отсчета при помощи средств крепления, например полухомутов. При этом контактный наконечник 20 своим шариком 33 взаимодействует с объектом контроля, например стенкой трубы.
При перемещении объекта контактный наконечник 20, находясь во взаимодействии с торцом реверсивного подшипника 21, торцовой частью 32 грибкообразного выступа 31 перемещает вместе с кожухом 22 выдвижной шток 9, который, сжимая пружину 10, перемещается внутри корпуса 1 и каркаса 2, опираясь на подшипники 12, 13. Надетый на шток 9 ферромагнитный сердечник 8 перемещается относительно обмоток 3, 4 и вызывает разбаланс моста, который измеряется и соответствует определенному перемещению объекта. При обратном смещении объекта контактный наконечник 20 перемещается штоком 9, который приводится в действие усилием сжатой пружины 10. При этом ферромагнитный сердечник 8 перемещается в обратную сторону и изменяет величину разбаланса моста.
Для настройки чувствительности датчика служат спаренные катушки 14 и сердечник 15, который может перемещаться относительно этих катушек.
Для калибровки датчика подключают ключом 29 катушку 18 к стабилизированному источнику 28 питания. Магнитное поле катушки 18 втягивает ферромагнитный якорь 19. Поскольку он соединен с контактным наконечником 20, взаимодействующим с объектом измерений, и перемещаться не может происходит перемещение катушки 18, кожуха 22 и штока 9. При этом пружина 10 сжимается, а зазор между тыльной частью реверсивного подшипника 21 и конической частью ферромагнитного якоря 19 выбирается. Перемещаясь внутри каркаса 2, шток 9 вместе с ферромагнитным сердечником 8 способствует изменению величины разбаланса моста, который соответствует заданному расстоянию смещения.
После отключения стабилизированного источника питания 28 пружина 10 перемещает шток 9 до контакта торца реверсивного подшипника 21 с тыльной частью 32 грибкообразного выступа 31 контактного наконечника 20. Шарик 33 постоянно находится в контакте с объектом контроля под воздействием пружины 10. В процессе калибровки эта пружина дополнительно сжимается силой притяжения ферромагнитного якоря 19 и катушки 18.
Благодаря этому при калибровке контролируется не только электрическая схема, но и механическая часть датчика, поскольку происходит перемещение штока 9 в подшипниках 11, 12. Кроме того, проверяется наличие контакта с объектом контроля, что дает дополнительную информацию о правильности установки датчика. Датчик может быть использован и с другими типами измерительных схем, кроме мостовой, его конструкция более проста, так как из калибратора устранен постоянный магнит со средствами его крепления. Это расширяет область применения, повышает надежность контроля и упрощает конструкцию датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И ВИБРАЦИЙ | 2016 |
|
RU2618625C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2375674C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВЗАИМОИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2464528C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И ВИБРАЦИЙ | 2011 |
|
RU2456541C1 |
| Электромагнитное реле | 1975 |
|
SU778718A3 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| Датчик линейных перемещений | 1991 |
|
SU1820196A1 |
| Устройство для исследования свойств грунта | 1981 |
|
SU1011778A2 |
| ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС ПОРШНЕВОГО КОМПРЕССОРА НА ОСНОВЕ ЛИНЕЙНОЙ МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2720882C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля вибраций и перемещений узлов различного оборудования в химической промышленности, на атомных электростанциях, а также на объектах с вредными условиями труда. Целью изобретения является упрощение конструкции и повышение надежности датчика линейных перемещений, содержащего корпус, контактный наконечник и выдвижной шток, подпружинный относительно корпуса, а также электромагнитный калибратор, ферромагнитный якорь которого соединен с контактным наконечником датчика. На выдвижном штоке датчика закреплен ферромагнитный сердечник, от положения которого зависит индуктивное сопротивление двух дифференциально соединенных обмоток датчика. Контактный наконечник установлен в реверсивном подшипнике и выполнен с грибкообразной головкой, взаимодействующей со свободным торцом штока своей плоской частью. Соединение между контактным наконечником и якорем калибратора выполнено с возможностью регулирования расстояния между ними, благодаря чему обеспечивается возможность контроля не только электрической, но и механической части датчика, что повышает удобство его эксплуатации. 1 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| "Messtechnishe Briefe", N 22, 1986, Heft 1, с.3-4. | |||
