Изобретение относится к электротехнике и может быть использовано для управления вьпфямительной установкой при работе с резкопеременными ударными нагрузками с широким диапазоном и большой скоростью регулирования выходного напряжения.
Целью изобретения является уменьшение размаха изменения напряжения сети при резких сбросах и набросах нагрузки.
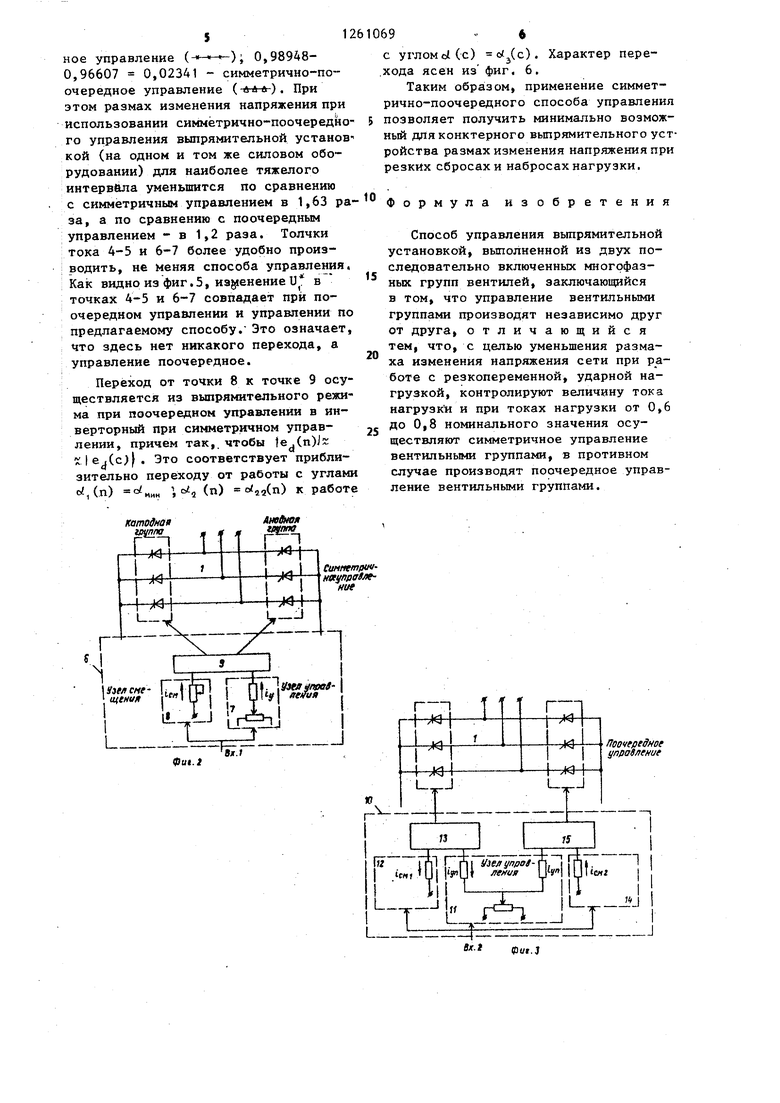
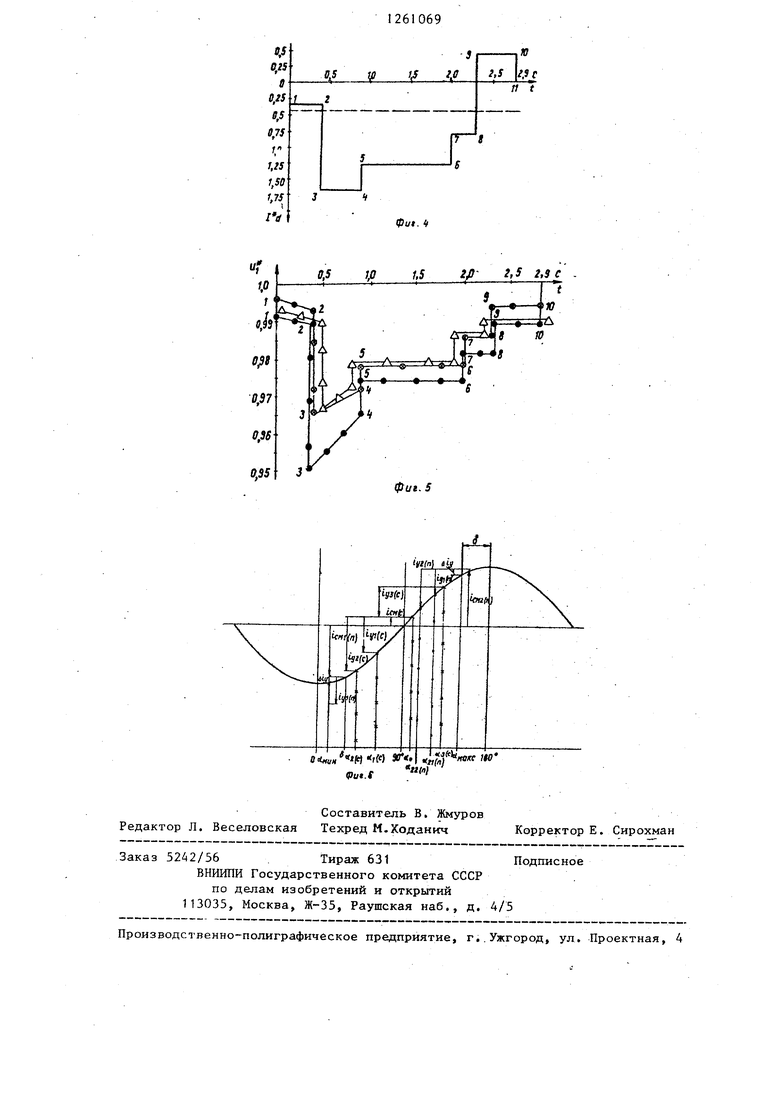
На фиг. 1 представлена схема выпрямительной установки, выполненной из двух последовательно включенных многофазных групп вентилей; на фиг. 2 - схема устройства реализации способа управления выпрямительной установкой при1 симметричном управлении. На фиг. 3 - то же, при поочередном управлении; на фиг. 4 - график изменения тока нагрузки в относительных единицах; на фиг. 5 - график изменения отношения U действующего значения первой гармоники напржения сети к ее номинальному зна- чению на фиг. 6 - один из вариантов работы узлов управления, смещения и компаратора для одной из полуфаз вы- гфямителя для вертикального способа фазосмещения.
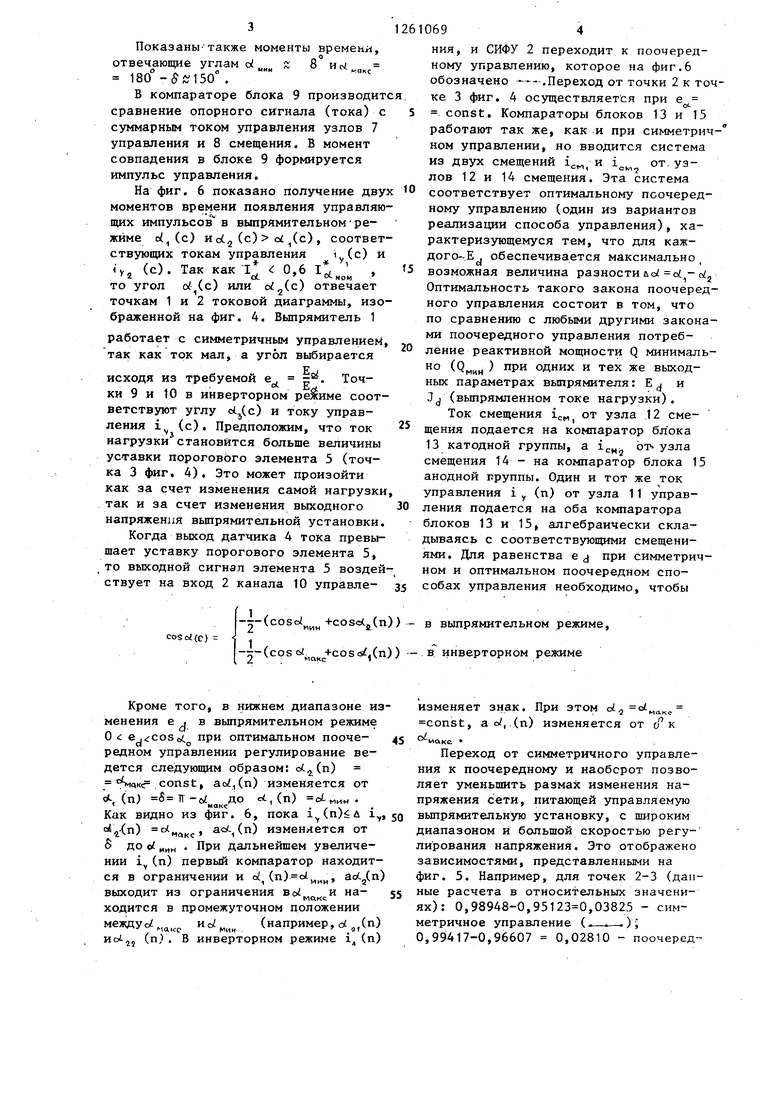
Выпрямительная установка 1 с системой импульсно-фазового управления (СИФУ) 2 подключена к злектродвигате лю 3. Датчик 4 тока выпрямительной установки 1 через пороговый элемент 5, устанавливающий режим работы установки 1, подключен к входу СИФУ 2. Устройство реализации способа управления выпрямительной установкой 1 (СИФУ 2) содержит канал 6 управления для симметричного режима управления, состоящий из узлов 7 управления,и 8 смещения, входы которых являются пер вым входом СИФУ 2, а выходы через блок 9 из последовательно соединенных компаратора, формирователя импульсов и усилителя подключен к управляющим переходам катодной и анодной групп выпрямительной установки 1. Канал 10 управления для поочередного режима управления состоит из узлов 11 управления и 12 смещения катодной группы, выходы которых через блок 13 из последовательно соединенных компаратора, формирователя; импульсов и усилителя подключены к управляющим переходам вентилей катодной группы выпрямительной установки 1. Выходы узлов
5
Ed,
(1)
11 управления и 14 смещения анодной группы через блок 15 из последовательно соединенных компаратора, фор- мирователя импульсов и усилителя под- ключены к управлйющим переходам вентилей анодной группы выпрямительной установки 1. Входы узля 11 управления и узлов 12 и 14 смещения являются вторым входом СИФУ 2.
Способ управления выпрямительной установкой осуществляется следующим образом.
Вьшрямительная установка 1 состоит из двух трехфазных-нулевых схем выпрямления: катодной и анодной.групп, тиристоры которых управляются симметрично с углами для катодной группы и (sL для анодной.
При этом внутренняя ЭДС вьшрямите- ля ЕJ равна
COScii + COSeiCj I
5 d - тГ л лм - амплитуда ли-°нейного напряжения питания.
-При симметричном управлении Ы. Ы2 oL.
При поочередном управлении не допускается одновременное изменение Ы.иЫ,.
Допустим, что выпрямительная установка 1 работает при токе нагрузки, который меньп1е уставки порогового
5 элемента 5, которая показана на
фиг. 4 пунктирной линией. В этом случае выходной сигнал датчика 4 тока такой, то пороговый элемент 5 работает на нижней части своей харак0 теристики вход-выхоД. Выходной сигнал порогового элемента 5 поступает на вход 1 канала 6 управления для симметричного режима работы СИФУ 2. На фиг. 5 симметричное управление значается t . Начальный угол 90° выставляется с помощью смещения (с) узла 8 смещения. Затем, алгебраически добавляя к смещению ток управления, получаем суммарньй сиг50 нал управления. В качестве опорного напряжения, в компараторе блока 9 используется синусоидальное напряжение, которое определенным образом смещено относительно коммутаци55 онного напряжения своего плеча выпрямителя. Моменты времени, соответствующие углам управления oii О, 9С и 180°, показаны на оси.
0
3
Показаны также моменты времени, отвечающие углам Ы „„ к в H 180°-, 150 .
В компараторе блока 9 производитс сравнение опорного сигнала (тока) с суммарным током управления узлов 7 управления и 8 смещения. В момент совпадения в блоке 9 формируется импульс управления.
На фиг. 6 показано получение двух моментов времени появления управляющих импульсов в выпрямительном - режиме oL(c) Hd.(c ) oL(c ) , соответствующих токам управления iy(c) и vj (с). Так как 1 0,6 , то угол d(c) или oi-(c) отвечает точкам 1 и 2 токовой диаграммы, изображенной на фиг. 4. Вьшрямитель 1
работает с симметричным управлением, так как ток мал, а угол выбирается
исходя из требуемой е -. Точки 9 и 10 в инверторном режиме соответствуют углу otjCc) и току управления i (с). Предположим, что ток нагрузки становится больше величины уставки пороговЬго элемента 5 (точка 3 фиг, 4). Это может произойти как за счет изменения самой нагрузки так и за счет изменения выходного напряжения выпрямительной установки. Когда выход датчика 4 тока превышает уставку порогового элемента 5, то выходной сигнал элемента 5 воздействует на вход 2 канала 10 управле-
(---(cosoi +cos(ii))- в выпрямительном режиме, 1-r-(cosoi +costs j(n))- в инверторном режиме V МЛКс , . .
Кроме того, в нижнем диапазоне изменения е 1 в выпрямительном режиме 0 e.coSoL при оптимальном пооче- 45 редном управлении регулирование ведется следующим образом: (п) кс .const, ) изменяется от oL, (п) (5 ТГ-СУ ДО , (п) . Как видно из фиг. 6, пока i(n)u i so о г-) макс ( изменяется от В до «/ „„„ . При дальнейшем увеличении i(п) первый компаратор находится в ограничении и oi (п)-Ы, aot,j(n) выходит из ограничения на- 55 ходится в промежуточном положении междуог,,,, (например, oi,,(n) иог., (п . В инверторном режиме i (п)
694
ния, и СИФУ 2 переходит к поочередному управлению, которое на фиг.6 обозначено.Переход от точки 2 к точке 3 фиг. 4 осуществляется при е const. Компараторы блоков 13 и 15 работают так же, как и при симметрич- ном управлении, но вводится система из двух смещений ICM, и i от.узлов 12 и 14 смещения. Эта система соответствует оптимальному поочередному управлению (один из вариантов реализации способа управления), характеризующемуся тем, что для каж- дого-Е , обеспечивается максимально
и
возможная величина разности до( о(,- с Оптимальность такого закона поочередного управления состоит в том, что по сравнению с любыми другими законами поочередного управления потребление реактивной мощности Q минимально (Q ) при одних и тех же выходных параметрах выпрямителя t Е и Jj (вьшрямленном токе нагрузки).
Ток смещения 1с„ от узла 12 смещения подается на компаратор бл ока 13 катодной группы, а т-сц, ° узла смещения 14 - на компаратор блока 15 анодной группы. Один и тот же ток управления i (п) от узла 11 управления подается на оба компаратора блоков 13 и 15, алгебраически складываясь с соответствующими смещениями. Для равенства е при симметричном и оптимальном поочередном способах управления необходимо, чтобы
изменяет знак. При этом .кс const, а о1,(п) изменяется от сС к
- ллкс.
Переход от симметричного управления к поочередному и наоборот позволяет уменьшить размах изменения напряжения сети, питающей управляемую выпрямительную установку, с широким диапазоном и большой скоростью регулирования напряжения. Это отображено зависимостями, представленными на фиг. 5. Например, для точек 2-3 (данные расчета в относительных значениях) : 0,98948-0,95123 0,03825 - симметричное управление (,-.-.); 0,99417-0,96607 0,02810 - поочередS1
ное управление ( « ) 0, 0,96607 0,02341 - симметрично-поочередное управление ( ада). При этом размах изменения напряжения при использовании симметрично-поочередно го управления выпрямительной установ кой (на одном и том же силовом оборудовании) для наиболее тяжелого интервала уменьшится по сравиению с симметричным управлением в 1,63 ра
за, а по сравнению с поочередным
управлением - в 1,2 раза. Толчки
тока 4-5 и 6-7 более удобно производить, не меняя способа управления,
Как видно из фиг.5, иа 1енениеи в
точках 4-5 и 6-7 совпадает при поочередном управлении и управлении по
предлагаемому способу. Это означает,
что здесь нет никакого перехода, а
управление поочередное.
Переход от точки 8 к точке 9 осуществляется из выпрямительного режима при поочередном управлении в ин- верторный при симметричном управлении, причем так,, чтобы }ej(n)J
,(с)}. Это соответствует приблизительно переходу от работы с углам о,(п) с/„„„ (п) (n) к работ
и
1 /rZZ- J
Фш. j
8ж.1
Форму
с углом о1 (с) о((с). Характер пере- .хода ясен из фиг, 6,
Таким , применение симметрично-поочередного способа управления позволяет получить минимально возможный для конктерного вьшрямительного устройства размах изменения напряжения при резких сбросах и набросах нагрузки.
ла изобретения
Способ управления выпрямительной установкой, вьтолненной из двух последовательно включенных многофазных групп вентилей, заключающийся в том, что управление вентильными группами производят независимо друг от друга, отличающийся тем, что, с целью уменьшения размаха изменения напряжения сети при работе с резкопеременной, ударной нагрузкой, контролируют величину тока нагрузк и и при токах нагрузки от 0,6 ДО 0,8 номинального значения осуществляют симметричное управление вентильными группами, в противном случае производят поочередное управление вентильными группами.
ИЗ
Г0.5
Ifl 1.5 i/l- f,5 2,3 С
Л
W
да
-фиг. 5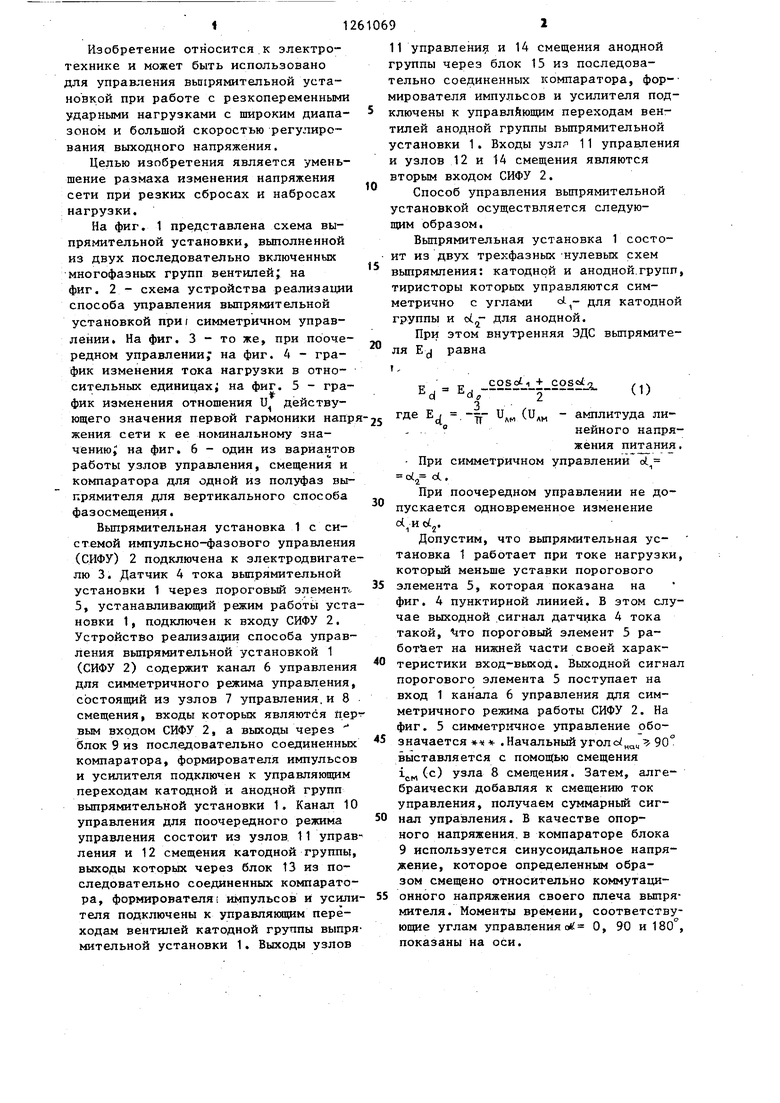
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления комбинированным преобразователем постоянного тока | 1978 |
|
SU741410A1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ В РЕВЕРСИВНОМ ТРЕХФАЗНОМ ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2498493C2 |
| Мостовой тиристорный преобразователь частоты | 1972 |
|
SU1181086A1 |
| Устройство для управления реверсивнымВЕНТильНыМ пРЕОбРАзОВАТЕлЕМ | 1977 |
|
SU809465A2 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| СТАБИЛИЗАТОР ТРЕХФАЗНОГО НАПРЯЖЕНИЯ С ОДНОФАЗНЫМ ЗВЕНОМ ВЫСОКОЙ ЧАСТОТЫ | 1996 |
|
RU2138112C1 |
| Способ управления циклоконвертором и устройство для его осуществления | 1981 |
|
SU1007177A1 |
| Способ управления циклоконвертором и устройство для его осуществления | 1983 |
|
SU1137557A1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| ПРЕОБРАЗОВАТЕЛЬ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА | 2019 |
|
RU2706422C1 |
Изобретение относится к электротехнике и может быть использовано для управления выпрямительной установкой при работе с резкопеременными ударными нагрузками с широким диапазоном и большой скоростью регулирования выходного напряжения. Целью изобретения является уменьшение размаха изменения напряжения сети при резких-сбросах и набросах нагрузки. Датчик тока 4 выпрямительной установки 1 ,контро- лнрует величину тока нагрузки 3. При токах нагрузки 3 от 0,6 до 0,8 номинального значения системой импульсно- фазового управления 2 осуществляется симметричное управление вентильными группами выпрямительной установки 1. В противном случае производится поочередное управление вентильными группами выпрямительной установки 1. 6 ил. S (Л ISD а 05 ;о
в «1/« И ff J l Л
«,«..f «
Составитель В. Жмуров Редактор Л. Веселовская Техред М.Ходанич
Заказ 5242/56 . Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г..Ужгород, ул. Проектная, 4
Корректор Е. Сирохман
| Жежеленко И.В | |||
| Показатели качества электроэнергии на промьшшен- ных предприятиях | |||
| М.: Энергия, 1977, с | |||
| Насос | 1917 |
|
SU13A1 |
| Автсрское свидетельство СССР | |||
| Способ управления выпрямительной установкой | 1955 |
|
SU111746A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
