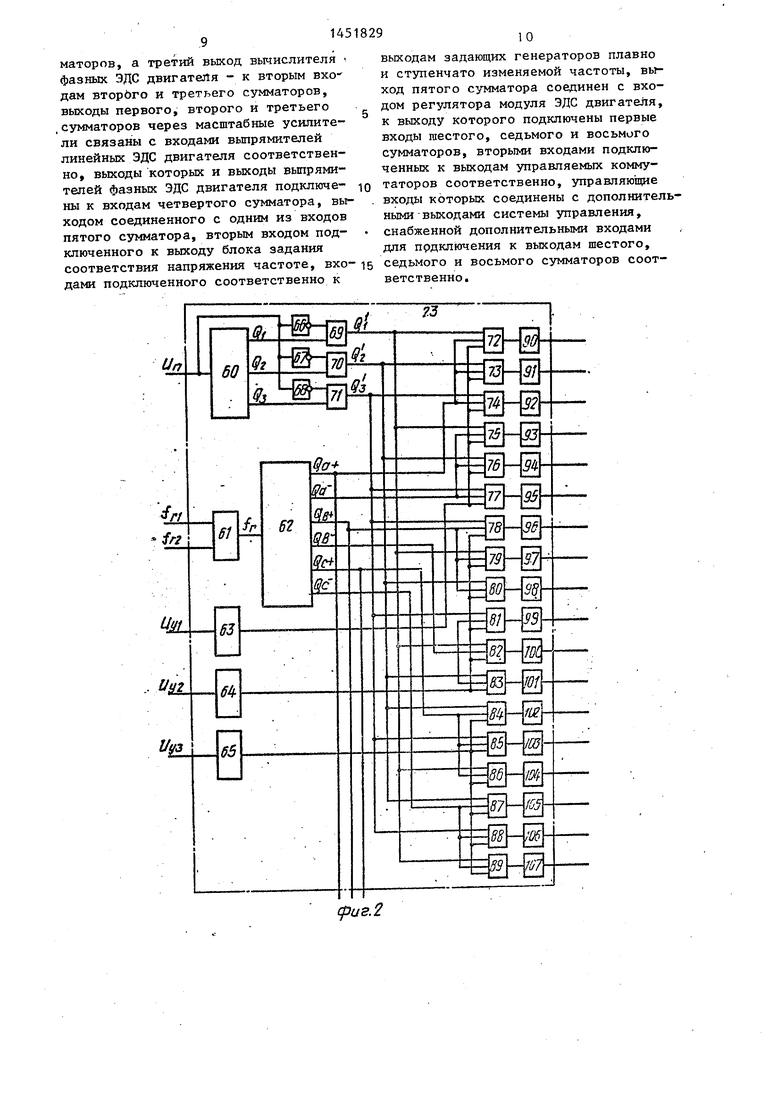
управления образует один из дополни- 20 кольцевым переключением пар тельных выходов системы 23 управле- тиристоров в пределах каждой мосто- ния и соединен с вторыми входами эле- вой схемы достигается уменьшение мощ- ментов ЗИ 72 - 74, второй выход QQ,.- ности потерь в шестерках тиристоров, узла управления соединен с вторыми формирующих режим максимальной выход- входами элементов ЗИ 75 - 77; третий 25 ной частоты преобразователя (частота выход Q 4to6pa3yeT второй дополнитель- питающей сети).
1ньй выход системы управления и под- При работе преобразователя в режим преобразования частоты выходные сигналы кольцевого сдвигающего ре- 30 гистра 60 блокируются элементами
НЕ 66 - 68 и элементами 2ИЛИ 69 - 71 о В этом режиме сигналы О ,, 0, О принимают единичные значения (фиг. 4). Выходные сигналы 0, 0,,-, Q(+, ,(;« 25 (фиг. 3) узла 62 управления, построенного на основе счетчика Джонсона, определяют продолжительность работы катодных и анодных групп тиристоров преобразователя в выпрямительном ре- а выходы СИФУ 63 - 65 подключены со- 40 жиме Импульсы управления, вьграбаты- ответственно к третьим входам элемен- ваемые СИФУ 63 - 65 в режиме коммута- тов ЗИ 72 - 77, 78 - 83, 84 - 89. тора, соответствуют углу управления Выходы элементов ЗИ 72 - 89 с вхо- d О эл.град.
дами усилителей-формирователей 90-107, При установке рукоятки командоап- выходы которых образуют выходы систе- 45 парата 24 в положения, соответствукпючен к вторым входам элемента ЗИ 78 - 80, четвертый выход управления соединен с вторыми входами элементов ЗИ 81 - 83; пятый-выход Q ,+узла управления образует третий дополнительный выход системы управления и соединен с вторыми входами элементов ЗИ 84 - 86, а шестой выход управления соединен с вторыми входами элементов ЗИ87-89. Входы СИФУ 63 - 65 образуют дополнительные входы системы 23 управления.
мы 23 управления.
Электропривод работает следующим образом
В электроприводе обеспечивается однозонное частотное регулирование частоты вращения асинхронного двигателя (вниз от номинального значения частоты вращения). Номинальная частота вращения двигателя достигается при его работе на частоте питающей сети, при этом в каждой из мостовых схем, образованных тиристорами 1 - 6-, 7 - 12, 13 - 18, включается одна пара встречно-параллельных тиристоров.
0
5
ющие переключениям пороговых схем от (п-1)-й до (К+1)-й, выходная час- тота преобразователя определяется задающим генератором 27. При переводе командоаппарата 24 в положение, соответствующее включению К-и пороговой схемы 25, блокируется задающий генератор 27 и включается задаквдий генератор 26.
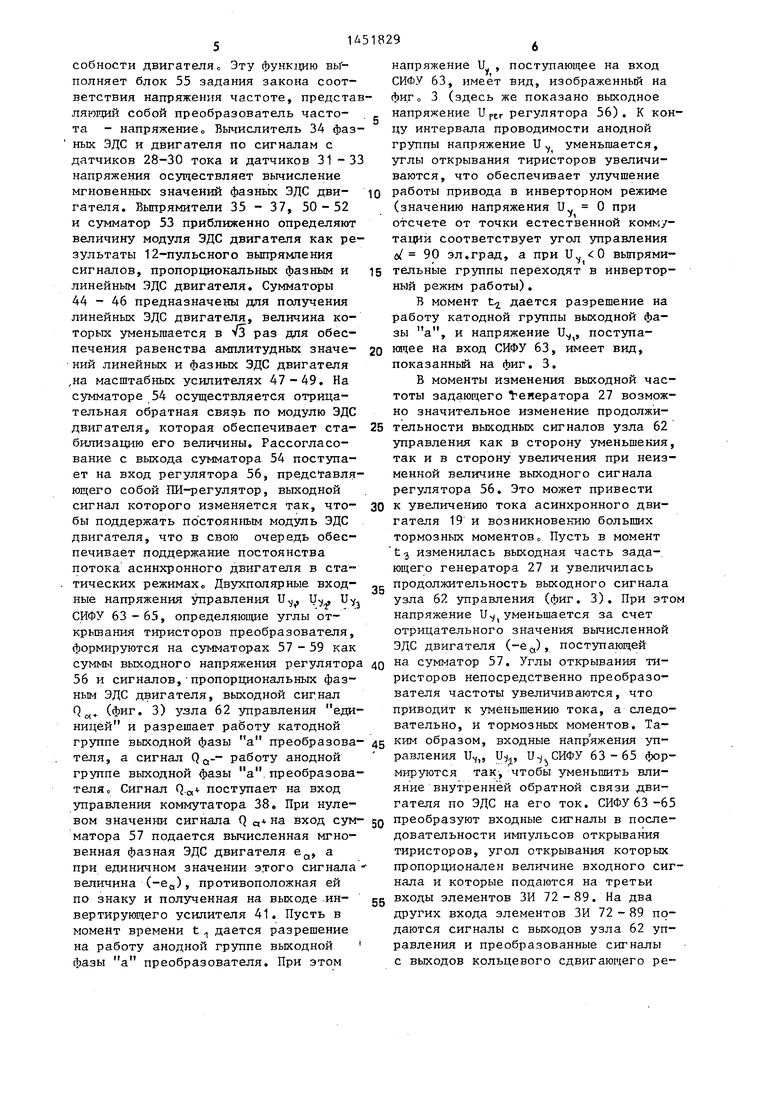
При изменении выходной частоты преобразователя изменяется и величина напряжения задания ЭДС по закону из/f const, обеспечивающему поддержание постоянства перегрузочной способности двигателя о Эту функзщю выполняет блок 55 задания закона соответствия напряженяя частоте, представляющий собой преобразователь часто- . та - напряжениео Вычислитель 34 фазных ЭДС и двигателя по сигналам с датчиков 28-30 тока и датчиков 31-33 напряжения осуществляет вычисление мгновенных значений фазных ЭДС дви- ю гателя. Выпрямители 35 - 37, 50-52 и сумматор 53 приближенно определяют величину модуля ЭДС двигателя как результаты 12-пульсного выпрямления сигналов, пропорциональных фазным и is линейным ЭДС двигателя. Сумматоры 44 - 46 предназначены для получения линейных ЭДС двигателя, величина которых уменьшается в V3 раз для обеспечения равенства амплитудных значе- 20 НИИ линейных и фазных ЭДС двигателя ,на масштабных усилителях 47-49. На сумматоре 54 осуществляется отрицательная обратная свядь по модулю ЭДС двигателя, которая обеспечивает ста- 25 билизацию его величины. Рассогласование с выхода сумматора 54 поступает на вход регулятора 56, представля ющего собой пи-регулятор, выходной сигнал которого изменяется так, что- ЗО бы поддержать по стоянным модуль ЭДС двигателя, что в свою очередь обеспечивает поддержание постоянства потока асинхронного двигателя в ста тических режимахо Двзосполярные входные напряжения управления И Ц.,. Uyj СИФУ 63 - 65, определяющие углы от- крьшания тиристоров преобразователя, формируются на сумматорах 57 - 59 как
напряжение U , поступающее на вход СИФУ 63, имеет вид, изображенный на фиг о 3 (здесь же показано выходное напряжение U pjr регулятора 56) , К концу интервала проводимости анодной группы напряжение и уменьшается, утлы открывания тиристоров увеличиваются, что обеспечивает улучшение работы привода в инверторном режиме (значению напряжения и„ О при отсчете от точки естественной коммутаций соответствует угол управления 0 90 эл.град, а при U 0 вьтрями- тельные группы переходят в инверторный режим работы).
В момент t дается разрешение на работу катодной группы выходной фазы а, и напряжение U, поступа- гачее на вход СИФУ 63, имеет вид, показанньй на фиг. 3.
В моменты изменения выходной частоты задающего Генератора 27 возможно значительное изменение продолжительности выходных сигналов узла 62 управления как в сторону уменьшения, так и в сторону увеличения при неизменной величине выходного сигнала регулятора 56. Это может привести к увеличению тока асинхронного двигателя 19 и возникновению больших тормозных моментов Пусть в момент 13 изменилась выходная часть зада-.
35
ющего генератора 27 и увеличилась продолжительность выходного сигнала узла 62 управления (фиг. 3). При этом напряжение U уменьшается за счет отрицательного значения вычисленной ЭДС двигателя (-е), поступающей
суммы выходного напряжения регулятора 40 сумматор 57. Углы открывания ти- 56 и сигналов,-пропорциональных фаз-ристоров непосредственно преобразоным ЭДС двигателя, выходной сигнал QOI (фиг. 3) узла 62 управления единицей и разрешает работу катодной группе выходной фазы а преобразова- 45 образом, входные напряжения уп- теля, а сигнал QQ-- работу анодной равления 11,, y.j, и.|,СИФУ 63-65 формируются так-, чтобы уменьшить влияние внутренней обратной связи двигателя по ЭДС на его ток. СИФУ 63-65 jQ преобразуют входные сигналы в последовательности импульсов открывания тиристоров, угол открывания которых
вателя частоты увеличиваются, что приводит к уменьшению тока, а следовательно, и тормозных моментов. Тагруппе выходной фазы а.преобразователя,, Сигнал Q.0,4- поступает на вход управления коммутатора 38. При нулевом значенрш сигнала Q е,+на вход сумматора 57 подается вычисленная мгноа
венная фазная ЭДС двигателя е при единичном значении этого сигнала величина (-ejj), противоположная ей по знаку и полученная на выходе .инвертирующего усилителя 41. Пусть в момент времени t дается разрешение на работу анодной группе выходной фазы а преобразователя. При этом
55
пропорционален величине входного сигнала и которые подаются на третьи входы элементов ЗИ 72-89. На два других входа элементов ЗИ 72 - 89 подаются сигналы с выходов узла 62 управления и преобразованные сигналы с выходов кольцевого сдвигающего ренапряжение U , поступающее на вход СИФУ 63, имеет вид, изображенный на фиг о 3 (здесь же показано выходное напряжение U pjr регулятора 56) , К концу интервала проводимости анодной группы напряжение и уменьшается, утлы открывания тиристоров увеличиваются, что обеспечивает улучшение работы привода в инверторном режиме (значению напряжения и„ О при отсчете от точки естественной коммутаций соответствует угол управления 0 90 эл.град, а при U 0 вьтрями- тельные группы переходят в инверторный режим работы).
В момент t дается разрешение на работу катодной группы выходной фазы а, и напряжение U, поступа- гачее на вход СИФУ 63, имеет вид, показанньй на фиг. 3.
В моменты изменения выходной частоты задающего Генератора 27 возможно значительное изменение продолжительности выходных сигналов узла 62 управления как в сторону уменьшения, так и в сторону увеличения при неизменной величине выходного сигнала регулятора 56. Это может привести к увеличению тока асинхронного двигателя 19 и возникновению больших тормозных моментов Пусть в момент 13 изменилась выходная часть зада-.
образом, входные напряжения уп- равления 11,, y.j, и.|,СИФУ 63-65 формируются так-, чтобы уменьшить влияние внутренней обратной связи двигателя по ЭДС на его ток. СИФУ 63-65 преобразуют входные сигналы в последовательности импульсов открывания тиристоров, угол открывания которых
вателя частоты увеличиваются, что приводит к уменьшению тока, а следовательно, и тормозных моментов. Та55
пропорционален величине входного сигнала и которые подаются на третьи входы элементов ЗИ 72-89. На два других входа элементов ЗИ 72 - 89 подаются сигналы с выходов узла 62 управления и преобразованные сигналы с выходов кольцевого сдвигающего регистра 60, которые осуществляют кольцевое переключение шестерок тиристоров в режиме коммутатора (в р -жиме преобразования частоты сигналы Q , Q, Q равны единице). Выходные налы элементов ЗИ 72 - 89 после преобразования их с-помощью усилителей- формирователей 90-107 формируются в сигналы У,-У,Jвключения соответству- югчих тиристоров,
В изобретении поставленная цель - улучшение энергетических и динамических показателей привода - достига ,ется за счет введения обратных связе по внутренним координатам асинхронного двигателя. В частности, введение отрицательной обратной связи по модулю ЭДС обеспечивает увеличение перегрузочной способности привода и повышение энергетических показателей за счет уменьшения токов на холостом ходу и при малых нагрузках.
В описанном электроприводе величина магнитного потока Ф сохраняется неизменной при различных нагрузйах двигателя, поэтому значение потока на холостом ходу может быть задано значительно меньше номинального Фчх (0,6 ... 0,7), Фц- номинальньй поток, что приводит к снижению тока холостого хода до уровня, близкого к току холостого хода двигателя в номинальных условиях питания (т.е. приблизительно в три раза меньше, чем в прототипе).
Таким образом, введение отрицательной обратной связи по модулю ЭДС обеспечивает улучшение энергетических -показателей электропривода за счет значительного снижения энергопотребления при малых нагрузках. При этом одновременно увеличивается перегрузочная способность электропривода и повышается общий коэффициент мощности привода за счет снижения величины магнитного потока (следовательно, и тока намагничивания) при малых нагрузках.
Формула изобретения
Асинхронный электропривод для грузоподъемного механизма, содержащий двигатель с трехфазной обмоткой статора, фазы которой соединены по схеме звезда, непосредственный преобразователь частоты, составленный из трех групп тиристоров, соединенных
Q
15 0
25 о
.Q
35
5
0
в каждой группе по трехфазной мосто- вой схеме, с выводами ;шя подключения к сети, а выводы по постоянному току мостовых схем образуют выходы непосредственного преобразователя частоты, к которым подключены выводы фаз обмотки статора электродвигателя, систему управления с входами управления частотой и напряжением питания, выходами подключенную к управляющим электродам тиристоров непосредственного преобразователя частоты, задающие генераторы плавного и ступенчатого .изменения частоты, выходы которых соединены со входами управления частотой питания системы тгравления, п пороговых схем, выходы К упомянутых пороговых схем подключены к входам задающего генератора плавно изменяемой частоты, выходы п - К пороговых схем соединены с входами задающего генератора ступенчато изменяемой частоты, выход п-й пороговой схемы подключен к входу управления амплитудой напряжения системы управления, командоаппарат, выходами соединенный с входами п пороговых схем, отличаю г; и и ся тем, что, с целью улучшения энергетических и динамических показатепей путем уменьшения тормозных моментов при переходе с одной частоты вращения на Другую, повьш1ения перегрузочной способности, введены блок задания закона соответст,вия напряжения к частоте, вычислитель фазных ЭДС двигателя, восемь аналоговых сумматоров, три масштабных усилителя, три выпрямителя фазных ЭДС, три выпрямителя линейных ЭДС двигателя, регулятор модуля ЭДС, три управляемых комм татора с. двумя информационными входами, три инверти- усилителя, датчики токов и напряжений обмотки статора двигателя, выходы которых соединены с входаьш вьиислителя фазных ЭДС двигателя, выходы которого соединены с первыми информационными входами управляемых коммутаторов, а через соответствующий инвертирующий усилитель - с вторыми информа1щоннь ми входами управляемых коммутаторов, с входами выпрямителей фазных ЭДС двигателя, при этом первый выход вычислителя фазных ЭДС двигателя подключен к первым входам первого и третьего сумматоров, второй выход вычислителя - к второму входу первого и первому входу второго сум9
1451829
маторов, а третий выход вычислителя фазных ЭДС двигателя - к вторым вхо дам вторбго и третьего сумматоров, выходы первого, второго и третьего сумматоров через масштабные усилители связаны с входами вьшрямителей линейных ЭДС двигателя соответственно, выходы которых и выходы выпрямителей фазных ЭДС двигателя подключе- ны к входам четвертого сумматора, выходом соединенного с одним из входов пятого сумматора, вторым входом под- ключенного к выходу блока задания соответствия напряжения частоте, вхо дами подключенного соответственно к
10
выходам задающих генераторов плавно и ступенчато изменяемой частоты, выход пятого сумматора соединен с входом регулятора модуля ЭДС двигателя, к выходу которого подключены первые входы шестого, седьмого и восьмого сумматоров, вторыми входами подключенных к выходам управляемых коммутаторов соответственно, управляющие входы которых соединены с дополнителными вькодами системы управления, снабженной дополнительными входами для прдключения к выходам шестого, седьмого и восьмого сумматоров соответственно.


| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |

Изобретение относится к электротехнике и может быть использовано Р грузоподъемных механизмах. Целью изобретения является улучшение энергетических и динамических показателей, путем уменьшения тормозных моментов и повьшение перегрузочной способности. Дня этого в асинхронном электроприводе для грузоподъемных механизмов с помощью вычислителя 34 внутренней ЭДС двигателя 19, сумматоров 44-46, 57-59, усилителей 47-49, выпрямителей 50-52 фазных ЭДС и выпрямителей 35-37 линейных ЭДС обеспечивается отрицательная обратная связь по модулю ЭДС. Сигнал по модулю ЭДС организуется на вькоде сумматора 53 и сравнивается в сумматоре 54 с сигналом блока 55 задания закона соответствия напряжешш частоте. По результатам сравнения посредством- регулятора 56 ЭДС, сумматоров 57, 58, 59 организуется формирование дополнительных сигналов уп - равления ключами 1-18 непосредственного преобразователя частоты, обеспечивающих уменьшение влияния внутренней обратной связи по ЭДС на ток двигателя 19 в режиме холостого хода и при малых нагрузках. В результате увеличивается перегрузочная способность, уменьшается энергопотребление. 4 ил. ю (Л
(pus.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый электропривод для грузоподъемного механизма | 1983 |
|
SU1111244A1 |
| , | |||
