Изобретение относится к теплоэнергетике и может быть применено для автоматического регулирования питания прямоточных котлов, имеющих две и более ниток.
Цель изобретения - повышение экономичности работы котла.
На фиг. I приведена структурная схема системы авторегулирования питания двухниточного котла, реализующая способ; на фиг. 2 - диаграммы изменений командных сигналов в зависимости от нагрузки котла.
Система содержит датчики 1 и 2 перепадов давления воды на регулирующих питательных клапанах 3 и 4, блок 5 выделения минимального сигнала, задатчик 6 минимального перепада давлений на питательных клапанах, регулятор 7 производительности питательного насоса 8, регуляторы 9 и 10 расхода воды по ниткам, датчики 11 и 12 расхода воды по ниткам, задатчики 13 и 14 расхода воды но ниткам, датчики 15 и 16 положения питательных клапанов 3 и 4, задатчик 17 положения максимально открытого питательного клапана, сумматоры 18-21. Датчики 11 и 12 и задатчики 13 и 14 подключены к своим регуляторам 9 и 10 расхода воды по ниткам, выходы которых подключены к своим питательным клапанам 3 и 4. Сумматоры 18-2 в реальной системе могут отсутствовать - сложение сигналов может производиться непосредственно сложением токов или напряжений.
Сигналы от датчиков I и 2 заведены соответственно на сумматоры 18 и 19, на них же заведен сигнал от задатчика б минимального перепада давления (с обратным знаком). Сигналы от датчиков 15 и 16 положения питательных клапанов заведены соответственно на сумматоры 20 и 21. На эти же сумматоры заведен сигнал от задатчика 17 положения максимально открытого питательного клапана (с обратным знаком). Сигналы от сумматоров 18-21 заведены на блок 5 выделения минимального сигнала (знаки сигналов от сумматоров 20 и 21 противоположны знакам сигналов от сумматоров 18 и 19). Сигнал с выхода блока 5 заведен на регулятор 7, который подключен к питательному насосу 8.
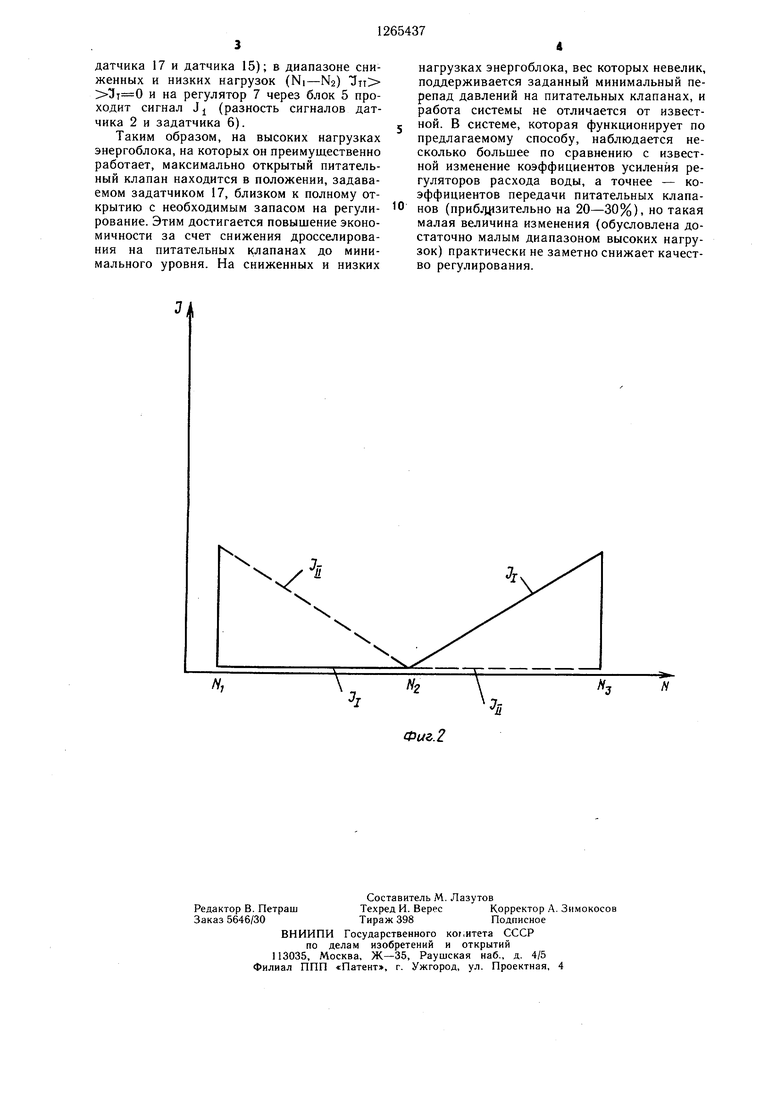
На диаграмме изменения командных сигналов в зависимости от нагрузки котла (фиг. 2) i - наименьший из сигналов на выходах сумматоров 18 и 19; ц - наименьший из сигналов на выходах сумматоров 20 и 21, взятый с обратным знаком.
Система работает следующим образом.
Регулятор 9, получая сигналы от датчика 11 и от задатчика 13 расхода воды, управляет питательным клапаном 3, стабилизируя расход по своей нитке в соответствии с сигналом от задатчика 13. Аналогично работает регулятор 10, получая сигналы от
,датчика 12 и задатчика 14, управляя питательным клапаном 4. Регулятор 7 управляет подачей насоса 8, получая минимальный сигнал от одного из сумматоров 18-21,
выделенный с помощью блока 5 выделения минимума.
Обозначим: tJi, 2, 3i5 и Зш - сигналы на выходах датчиков 1,2, 15 и 16; ;1б и Ji - сигналы на выходах задатчиков 6 и 17; is, 19, 20, 21 - сигналы на выходах сумматоров 18-21. Заданный минимальный перепад давлений в диапазоне высоких нагрузок энергоблока (например, 85-100%) выбирается таким, чтобы он был меньше фактического (минимального значения). Слеj довательно, и бОа. СигналIJi от задатчика 17 выбирается таким, чтобы положение максимально открытого клапана (при высоких нагрузках) находилось вблизи полного открытия с необходимым запасом на регулирование (например, 4-8% от хода пи0 тательного клапана). Из этих условий следует: если питательный клапан 3 является наиболее открытым, то датчик 15 положения выдает наибольший сигнал (); после суммирования на выходе сумматоров 20 и 21 появляются сигналы
5 Так как3i5 3i6, To32o 32i. Учитывая перемену знака на выходе блока 5 выделения минимума, и, следовательно, согласно принятому обозначению
Зп -- 20 17- 315Если с помощью регулятора производительности положение наиболее открытого к.,тапана устанавливается (регулируется) в соответствии с сигналом задания от задатчика 17 (на высоких нагрузках), тоЗ|7-3i6 3ii 0. Но при этом и , следовательно
5 иJi9 2 t 6 0. И если, например, , то .0. Поэтому на высокой нагрузке3ii 3i, через блок выделения минимального сигнала проходит сигнал 3ii 3i7- l и в данном примере регулируется положение питательного клапана 3.
0 При снижении нагрузки наступает момент, зависящий от сигнала задатчика 6, когда наименьший из сигналов 3i, сравняется с tJe. Пусть, напри.мер, это будет сигнал , т. е. 3i 32-Зь 0. При дальнейшем снижении нагрузки перепад давления на пи5 тательном клапане 4 имеет тенденцию к уменьшению, но регулятор 7 производительности, снижая загрузку насоса, вызывает прикрытие питательных клапанов, выдерживая при этом сигнал , котоQ рый проходит через блок выделения минимального сигнала. При этом сигнал 371 7) и, следовательно, через блок 5 не проходит. Диаграммы изменения командных сигналов 3т и tfn (фиг. 2) подтверждают, что в диапазоне высоких нагрузок
5 (N2-NS), на которых преимущественно работает энергоблок, и через блок 5 на регулятор 7 производительности насоса поступает сигнал tlr (разность сигналов задатчика 17 и датчика 15); в диапазоне сниженных и низких нагрузок (Ni-N2) Лтт и на регулятор 7 через блок 5 проходит сигнал Jj (разность сигналов датчика 2 и задатчика 6).
Таким образом, на высоких нагрузках энергоблока, на которых он преимущественно работает, максимально открытый питательный клапан находится в положении, задаваемом задатчиком 17, близком к полному открытию с необходимым запасом на регулирование. Этим достигается повышение экономичности за счет снижения дросселирования на питательных клапанах до минимального уровня. На сниженных и низких
нагрузках энергоблока, вес которых невелик, поддерживается заданный минимальный перепад давлений на питательных клапанах, и работа системы не отличается от известной. В системе, которая функционирует по предлагаемому способу, наблюдается несколько большее по сравнению с известной изменение коэффициентов усиления регуляторов расхода воды, а точнее - коэффициентов передачи питательных клапанов (приб ц1зительно на 20-30%), но такая малая величина изменения (обусловлена достаточно малым диапазоном высоких нагрузок) практически не заметно снижает качество регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования питания прямоточного котла | 1984 |
|
SU1282079A1 |
| Автоматическая система регулирования подачи воды в многопоточный парогенератор энергоблока | 1983 |
|
SU1134843A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЭНЕРГОБЛОКА С ПРЯМОТОЧНЫМ КОТЛОМ | 1972 |
|
SU436211A1 |
| Система регулирования питания парогенераторов | 1985 |
|
SU1320795A1 |
| Система регулирования энергоблока | 1976 |
|
SU657179A1 |
| Способ предотвращения срыва питательного насоса энергоблока | 1985 |
|
SU1333952A1 |
| Устройство для управления расходом питательной воды паропроизводящих установок | 1981 |
|
SU962866A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПИТАНИЯ ВОДОЙ | 1973 |
|
SU383962A1 |
| Система регулирования температурного режима прямоточного котла | 1981 |
|
SU983387A1 |
| Система регулирования мощности паровой турбины | 1977 |
|
SU635267A1 |
СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПИТАНИЯ ПРЯМОТОЧНОГО КОТЛА от общей магистрали путем изменения положения регулирующих клапанов на каждой нитке котла по параметрам, характеризующим заданное и текущее значения расхода воды в своей нитке, измерения перепадов давления на каждом регулирующем клапане, сравнения последних с заданным минимальным значением, формирования экстремального значения результатов сравнения и изменения по последнему производительности питательного насоса, отличающийся тем, что, с целью повыщения экономичности работы котла, дополнительно измеряют параметр, характеризующий положение каждого регулирующего клапана, сравнивают его инвертированное значение с заданным максимально открытым положением клапана и минимальное значение результатов этих сравнений и сравнений измеренных перепадов давления с заданным используют в качестве экстремального.
| Способ автоматического регулирования подачи питательной воды | 1980 |
|
SU909415A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
